Copernicus: Sentinel-4
EO
ESA
Atmosphere
Cloud type, amount and cloud top temperature
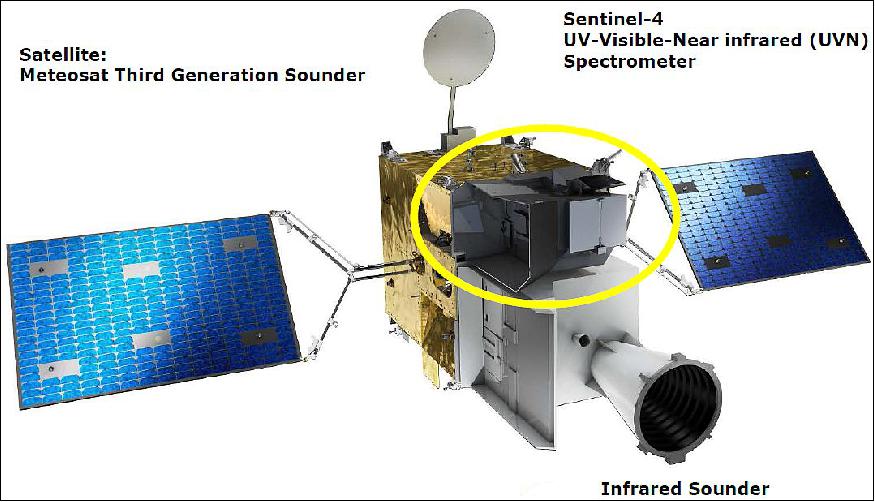
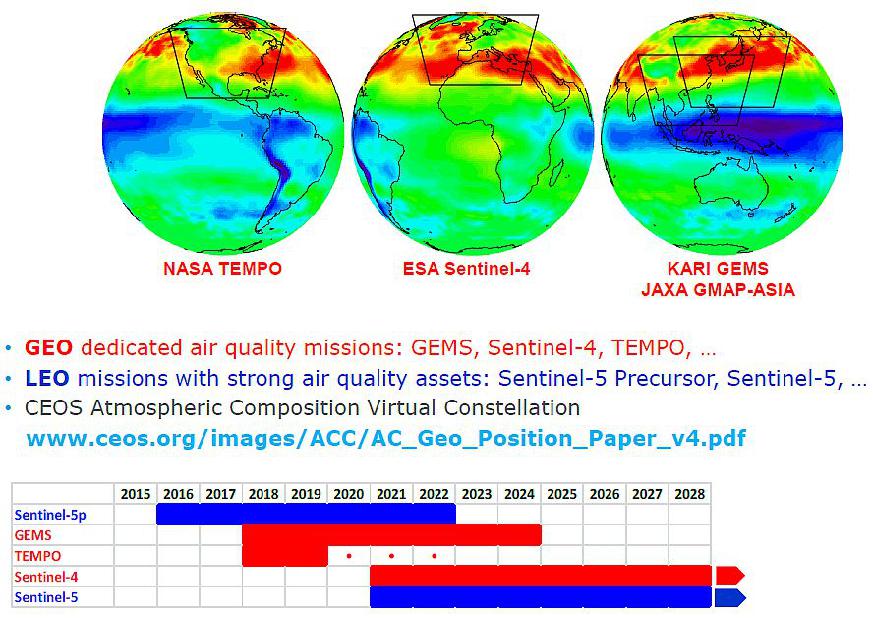
Sentinel-4 (S-4), a part of the Europe's Copernicus programme, represents the geostationary component of European atmospheric composition monitoring missions. Sentinel-4 will have the primary objective of observing the diurnal cycle of the tropospheric composition over Europe and North Africa; monitoring in particular key air quality trace gases such as ozone, nitrogen dioxide, sulphur dioxide, formaldehyde, glyoxal, as well as aerosol and cloud properties. The instruments will be hosted onboard the Meteosat Third Generation-Sounder (MTG-S) platforms, with Sentinel-4A on MTG-S1, and Sentinel-4B on MTG-S2.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, EUMETSAT, COM |
| Mission status | Commissioning |
| Launch date | 01 Jul 2025 |
| Measurement domain | Atmosphere |
| Measurement category | Cloud type, amount and cloud top temperature, Cloud particle properties and profile, Aerosols, Ozone, Trace gases (excluding ozone) |
| Measurement detailed | Cloud top height, Cloud cover, Cloud optical depth, Aerosol optical depth (column/profile), O3 Mole Fraction, NO2 Mole Fraction, BrO (column/profile), NO (column/profile), SO2 Mole Fraction, ClO (column/profile), Aerosol Layer Height, HCHO Mole Fraction, CHOCHO (column/profile), SO2 Total Column, O3 Total Column, NO2 Total Column, HCHO Total Column, NO2 Tropospheric Column, O3 Tropospheric Column |
| Instruments | UVN (Sentinel-4) |
| Instrument type | Atmospheric chemistry |
| CEOS EO Handbook | See Copernicus: Sentinel-4 summary |
Related Resources

Summary
Mission Capabilities
The Sentinel-4 mission consists of a single instrument payload; a passive UVN (Ultraviolet-Visible-Near-Infrared) hyperspectral imaging spectrometer that is capable of imaging in the ultraviolet and visible range. Sentinel-4 will provide a variety of atmospheric data products, including ozone total column and tropospheric sub-column, nitrogen dioxide total column and tropospheric sub-column, sulphur dioxide total column, formaldehyde total column, glyoxal total column, cloud optical thickness, fraction and altitude, aerosol column thickness, type, layer height, and absorbing index and surface and aerosol characteristics. These data products will provide coherent information on atmospheric variables in supporting relevant European policies for the benefit of the European citizens.
Performance Specifications
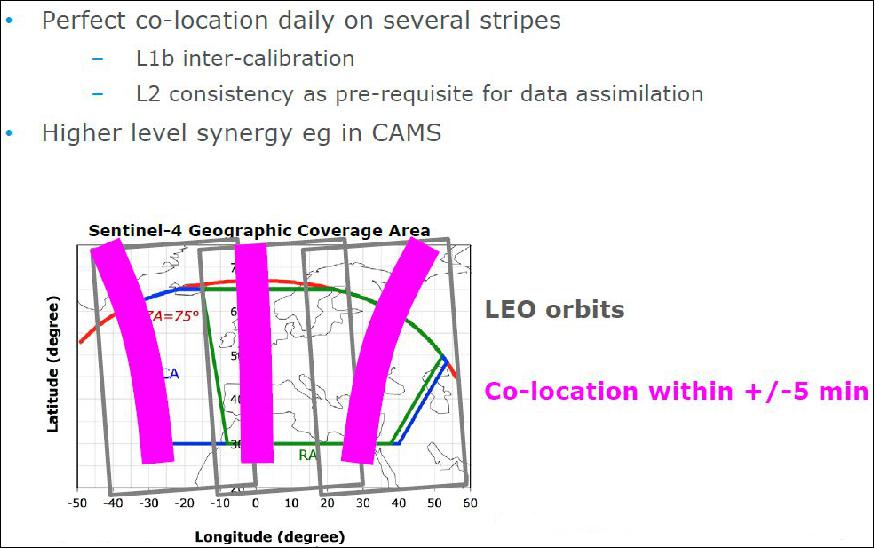
Sentinel-4 will monitor within the Geographic Coverage Area (GCA) which covers Europe, parts of North Africa, and parts of the Atlantic from 30 - 65°N in latitude and 30°W - 45°E in longitude. The instrument is a wide-field pushbroom hyperspectral imaging spectrometer that scans the GCA in the East-West direction with a repeat cycle of 60 minutes. S-4 has a surface sample distance (SSD) of 8km. The instrument is capable of imaging in the ultraviolet (305-400 nm) and visible range (400-500 nm) with a spectral resolution of 0.5 nm, and in the near-infrared range (750-775 nm) with a spectral resolution of 1.2nm.
Sentinel-4 will be in a geostationary orbit at an altitude of about 36000 km above Europe and at a fixed longitude of about 0 degrees.
Space and Hardware Components
The Sentinel-4 instrument is to be hosted on board the MTG-S satellite which uses a Luxor bus from OHB (Otto Hydraulic Bremen) systems. The satellite is three-axis stabilised allowing it to constantly be pointing toward Earth.
Copernicus: Sentinel-4
Overview
The Sentinel-4 (S-4) mission within the context of Copernicus represents the geostationary component of European operational atmospheric composition monitoring missions.
In December 2007, the European Commission was delivered recommendations for the development of operational capabilities for the measurement of atmospheric parameters from space. In particular, it recommended implementing the Sentinel-4 mission as a UVN (UV/Visible/Near-infrared) sounder to be deployed on the two MTG Sounding (MTG-S) satellites. 1) 2) 3) 4) 5) 6)
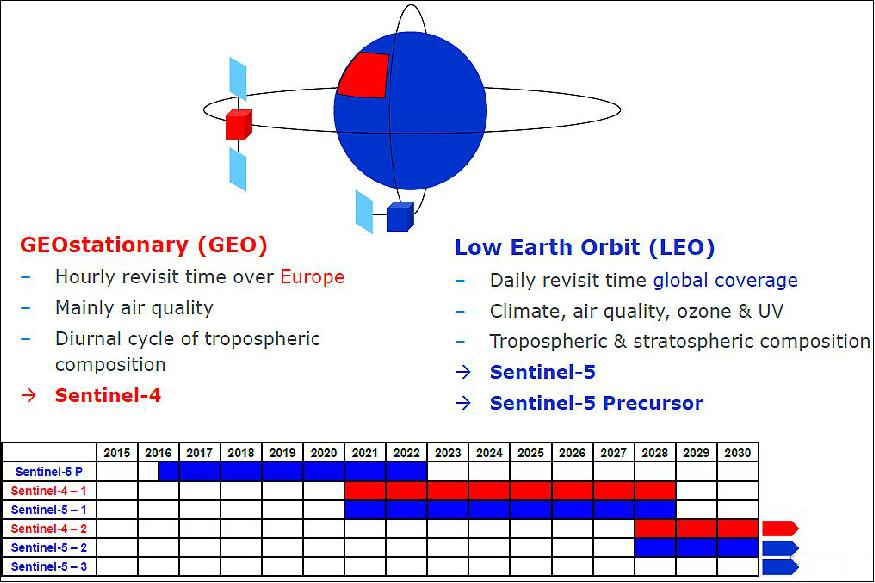
The objective of Sentinel-4 is to monitor key air quality trace gases and aerosols over Europe at high spatial resolution with a fast (hourly) revisit time in support of the GMES Atmosphere Service. The objective of the LEO missions, S-5 and S-5P, is to measure daily at global scale and high spatial resolution air quality and climate related trace gases and aerosols in the Earth's atmosphere. The target species including O3, NO2, SO2, HCHO and aerosols shall be observed to support operational services covering air-quality near real-time applications, air-quality protocol monitoring and climate protocol monitoring.
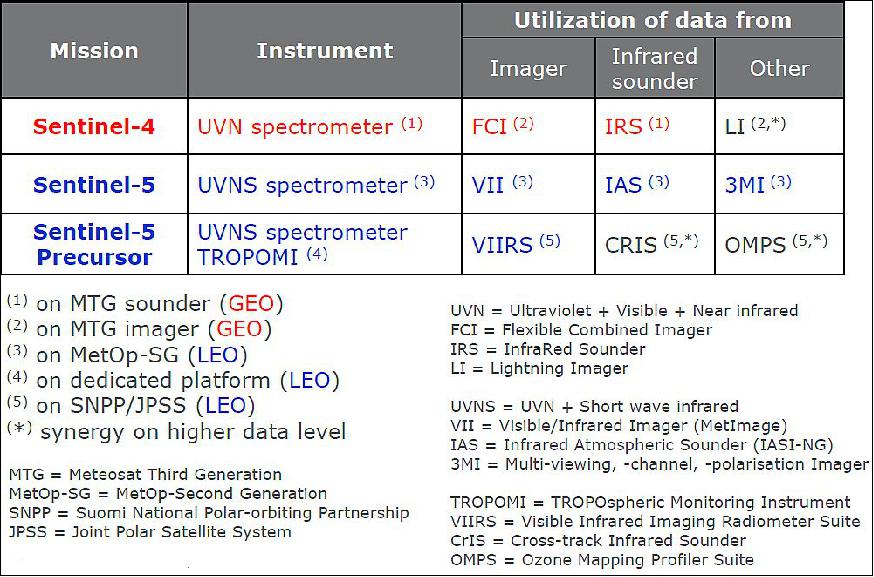
The Sentinel-4 system consists of an UVN (Ultra-violet Visible Near-infrared) imaging spectrometer embarked on EUMETSAT's geostationary MTG-S platforms and relies on the utilization of subsets of data from EUMETSAT's IRS sounder on-board the same platforms and from EUMETSAT's Flexible Combined Imager (FCI) imager on-board the MTG-Imager (MTG-I) platforms. 8)

Considering the severe polarization sensitivity requirement and the sounder mass and volume constraints (140 kg), the concept that has been selected is a polarization scrambler to make the instrument insensitive to polarization. The concept of measuring polarization with high spectral resolution has not been retained due to the increased complexity and mass.
Sentinel-4 will observe the atmosphere from Geostationary obit, and will be complemented by the Sentinel-5 and Sentinel-5 precursor (Sentinel-5P) missions operating in Low Earth Orbit. Sentinel-5 will fly on the MetOp Second Generation A (MetOp-SG-A) platforms, while Sentinel-5P operates on a standalone platform.
The Sentinel-4 mission will consist of an UVN (Ultraviolet-Visible-Near-Infrared) spectrometer accommodated on Meteosat Third Generation Sounder (MTG-S) platforms.
Launch
The Sentinel-4 payloads will be hosted onboard the Meteosat Third Generation-Sounder (MTG-S) platforms. Sentinel-4A is hosted on MTG-S1which was launched on July 1, 2025 aboard SpaceX’s Falcon 9 rocket, as part of the Eumetsat MTG-S1 mission, from Launch Complex 39A (LC-39A) at Kennedy Space Center in Florida, at 21:04 UTC. Sentinel-4B will be hosted on MTG-S2. 17)
Orbit
Geostationary orbit, located at ~0º longitude, at an altitude of approximately 35,786 km.
Mission Status
• July 1, 2025: Sentinel 4A was successfully launched onboard the MTG-S1 (Meteosat 13) spacecraft at 21:04 UTC, as part of the Eumetsat MTG-S1 mission, which took off aboard SpaceX’s Falcon 9 rocket from Launch Complex 39A (LC-39A) at Kennedy Space Center, in Florida. 69)

• May 7, 2025: MTG-S1, with Sentinel-4A onboard, has arrived in the Cape Canaveral harbour, in the US, ready for launch. The satellite travelled in a safe container on board the MN Colibri cargo ship, which left Bremen harbour on April 23, 2025. The journey across the Atlantic was completed on May 6, 2025. Once the satellite container is offloaded, it will be transported to Astrotech facilities, where preparation for launch will take place in the coming weeks. 18)

Sensor Complement
On July 11, 2011, ESA awarded a contract to Airbus DS (Ottobrunn, Germany), formerly Astrium, to develop and build two satellite sensors that will monitor Earth's atmosphere as part of Europe's Copernicus program. The identical spectrometers, known as Sentinel-4, will each be carried on the MTG (Meteosat Third Generation) weather satellites. 11)
The Sentinel-4 system consists of an UVN (Ultra-violet Visible Near-infrared) imaging spectrometer embarked on the EUMETSAT's geostationary MTG-S platforms and relies on the utilization of subsets of data from EUMETSAT's IRS (Infrared Sounder) on-board the same platforms and from EUMETSAT's FCI (Flexible Combined Imager) imager data on-board the MTG-I platforms.
The Sentinel-5 UVN and SWIR (UVNS) sounder is planned to be embarked on EUMETSAT's EPS-SG series of LEO satellites (i.e. MetOp-SG series), while the Sentinel-5P mission will fly on a dedicated platform.
UVN (Ultraviolet-Visible-Near-Infrared) Spectrometer
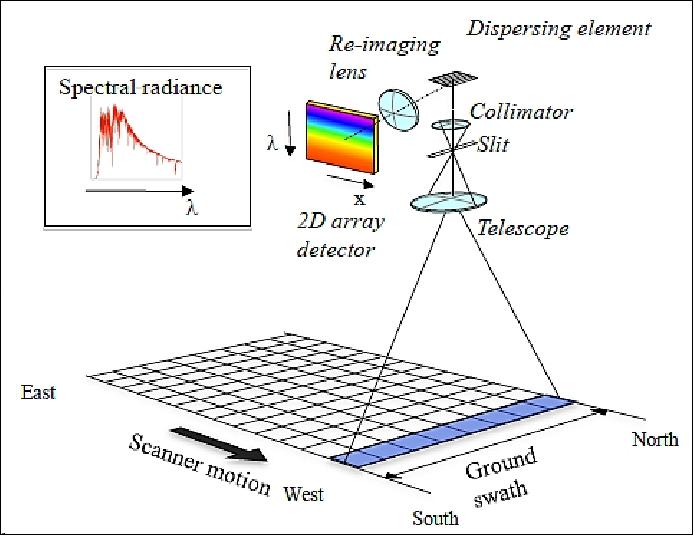
The UVN instrument is a wide-field pushbroom hyperspectral imaging spectrometer, a sounder, that scans Europe in the East-West direction with a repeat cycle of 60 minutes. The FOV is about 9º in the East-West direction and about 3.4º in the North-South direction, centred on Europe. The UVN spectrometer features bands in the UV and VIS (305-500 nm) with a spectral resolution of 0.5 nm, and in the NIR (750-775 nm) spectral ranges with a spectral resolution of 0.12 nm, in combination with low polarization sensitivity and a high radiometric accuracy. 12) 13) 14)
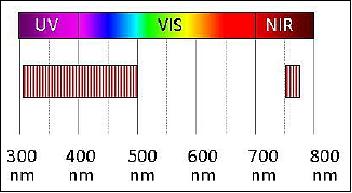
Band | Spectral range (nm) | Spectral | SSD | SNR @ 50ºN, 15:00 UTC, Equinox, albedo 0.05 (UV-VIS) & 0.15 (NIR) (per spectral sample) | Spectral sampling ratio | Species |
UV | 305-400 | 0.5 | 8 km | 200 - 1000 | 3 | O3, SO2, BrO, HCHO, AAI, AOD, Ring |
VIS | 400-500 | 0.5 | 8 km | 1400 | 3 | NO2, O4, IO CHOCHO, AOD |
NIR | 750-775 | 0.12 | 8 km | 600 | 3 | Cloud, Aerosol |
The instrument design enables a short revisit time from east to west in one hour with sufficient east-west spatial dimension, covering most of Europe and North Africa. The reference area and the larger geographical coverage areas are shown in Figure 4. The east-west spatial dimension is accounted for by scanning the scan mirror from east to west in one hour. With about 570 spatial samples in the east-west spatial dimension this corresponds to about 6 seconds per 8 km spatial sample.
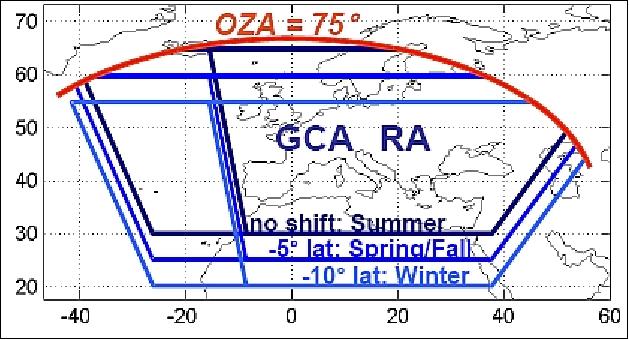
Legend to Figure 4: OZA = Observation Zenth Angle.
Composition
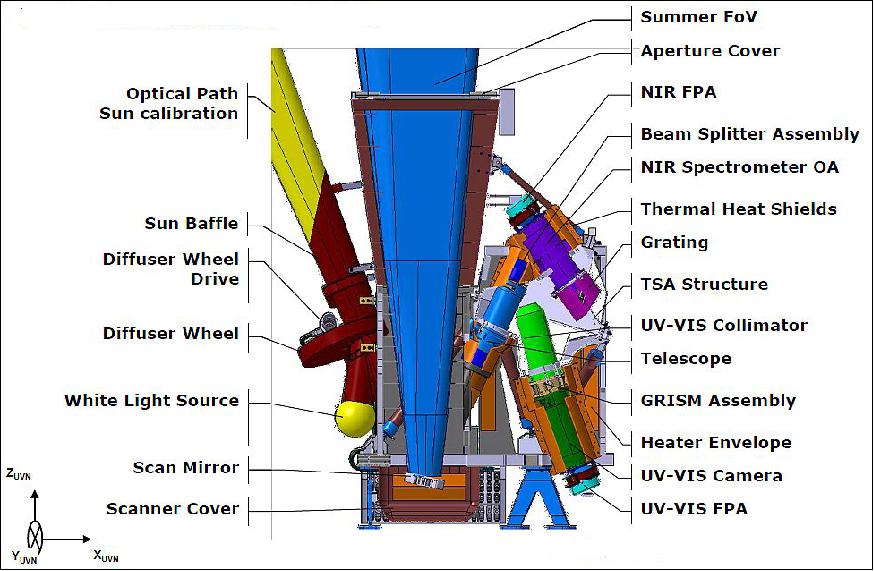
The instrument is composed of 3 units (Ref. 6):
• Main Optical Unit that contains the optical and detection part
• VEU (Video Electronic Unit)
• ICU (Instrument Control Unit).
At sunrise in the east the instrument only scans the illuminated Earth, resulting in a total scan time of less than one hour. In the evening the same scenario is followed in the west. During autumn-winter the coverage area is shifted twice south by 5º in order to optimize observation of illuminated areas, as shown in Figure 4. During winter-spring, the scenario is reversed.
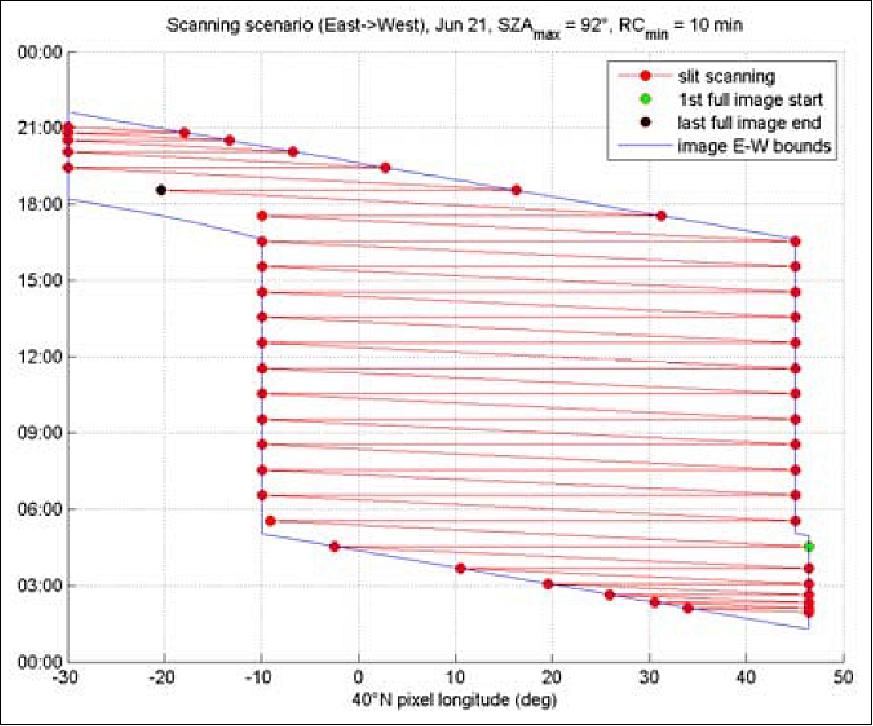
An example for a possible East-West scan in the NEO (Nominal Earth Observation) mode is given in Figure 5.
The accommodation of the instrument onboard MTG-S is optimized, allowing the Earth radiance, sun irradiance and thermal fields of view to be clear and unobstructed. Furthermore straylight from the sun or the Earth via other spacecraft components is minimized per design. This is particularly important for such class of space instrumentation for which the Level 1b and Level 2 data product accuracies are very sensitive to even small straylight contributions.
At the equinoxes, the MTG-S spacecraft performs a yaw-flip maneuver in order to keep the satellite and instrument thermal environment optimized. For the instrument this implies that the scan mirror has to adjust the north-south axis to keep the geographical coverage area in view and reverse the east-west scan axis in order to keep scanning from east to west. In addition, the sun observations are performed in the evening rather than in the morning, or vice versa, as a result of the spacecraft yaw-flip maneuver.
The instrument is equipped with two frame-transfer CCD (Charge Coupled Device) detectors, one for the UV-VIS wavelength range and one for the NIR wavelength range. One dimension on the CCDs corresponds to the spectral dimension, while the other dimension corresponds to the north-south spatial dimension.
In the wavelength range covered by Sentinel-4/UVN the light from the Earth's atmosphere can be strongly linearly polarized, which is accounted for in the instrument design by minimizing the overall instrument polarization sensitivity in combination with the use of a weak polarization scrambler. A refractive spectrometer design is the baseline with two separate spectrometers, one optimized for the Ultra-Violet (UV) and visible (VIS) wavelength range and the other for the 25 nm spectral band in the Near-Infra-Red (NIR).
The instrument's polarization sensitivity has to be balanced with the optical quality properties on the Earth, which is especially critical for an instrument in a geostationary orbit. Using a too strong polarization scrambler will result in too much blurring of the ground sampling distance on the Earth's surface. Another way of putting this is to say that the integrated energy within a ground pixel (spatial sample) will need to be contained within the required values. As such, the polarization sensitivity, required to be less than 1%, and the integrated energy of a ground (spatial) sample are competing parameters.
The instrument is equipped with two solar diffusers that are designed to minimize the introduction of spectral and spatial features in the spectra that can interfere with the retrieval of the atmospheric trace gases.
The first diffuser is used on a daily basis to provide the required solar irradiance measurement data to allow calculation of the Earth reflectance (Earth radiance divided by solar irradiance), the second one on a monthly basis in order to monitor the radiometric degradation of the first diffuser. The solar measurements are performed at sunrise or sunset when no useful Earth radiance measurements are performed.
The instrument is also equipped with a 5 W WLS (White Light Source) in its calibration assembly. LEDs (Light Emitting Diodes) are integrated close to the detectors to monitor potential radiometric degradation, detector and electronics properties like detector bad and dead pixels, detector PRNU (Pixel Response Non-Uniformity), system non-linearity, etc.
Instrument originating spectral features, e.g. from the on-board diffusers as observed in predecessors, as well as remaining polarization spectral features may hamper the analysis of atmospheric trace gases. There are no dedicated calibration key parameters planned for correction of the spectral features, therefore these features have to be eliminated by the instrument design.
The relative spectral radiometric accuracy (peak-to-peak) are considering small spectral window widths of a couple of nm's, which for compliance of the requirement incorporate these spectral features next to other relevant errors for the instrument response in sun calibration, Earth observation modes and for Earth reflectance. As example, in the UV/VIS between 315 and 500 nm, the maximum relative radiometric spectral accuracy error over a spectral window width of 3 nm is required to be smaller than 0.05%. The in-flight absolute radiometric accuracy of the Earth spectral radiance and of the Sun irradiance is required to be better than 3% with a goal of 2%. All values apply on a 1σ confidence level.
For sensitive hyperspectral spectrometers in Earth atmospheric observations such as Sentinel-4/UVN, the performance at Level 1b (and subsequently at Level 2) is a challenging balance between instrument performance and design at Level 0 and calibration plus data processing to convert the Level 0 data into geophysically calibrated Level 1b data. Depending on the parameter under consideration, the performance at Level 1b needs to be optimized by imposing more effort on any or more of the above three areas (instrument performance at Level 0, calibration and data processing) in order to obtain the best final results at Level 1b, that is compliant with the instrument Level 1b requirements at beginning of life and end of life (Ref. 5).
UVN spectrometer requirements:
• Pushbroom in E/W direction
• N/S FOV: 4°
• E/W FOR: 6.8°
• 2 grating (dispersive) spectrometers
• CCD detectors cooled at 230 K
• High SNR
• Scan mirror:
- E/W scan
- N/S for compensation of MTG yaw flip maneuver around equinox; seasonal shift in latitude (per steps of 5º up to 10º)
• High performance on board calibration sources (diffusers, lamp, LED)
• Instrument mass = 200 kg; power = 180 W; data rate = 30 Mbit/s.
Revisit time | 1 hour |
Geographic coverage | Europe + part of Atlantic + part of Sahara, FOV = 4º N/S, 11º-14º E/W |
Spatial sampling | 8 km at 45º N, 530 x 570 spatial samples |
Spatial resolution | 8.9 km N/S, 11.7 km E/W at 45º N |
Spectral range | UV-VIS: 305-500 nm, NIR: 750-775 nm |
Spectral resolution | UV-VIS ≤ 0.5 nm, NIR ≤ 0.12 nm |
Spectral sampling ratio | >3 |
Instrument envelope | 1000 x 1000 x 1500 mm3 |
Instrument mass, power | 200 kg, 180 W |
Data rate (nominal operation) | 30 Mbit/s |
Species | Uncertainty better than (for all species: solar zenith angle and viewing zenith angle <60º) | Conditions |
O3 total column | 3% (goal) / 4% (threshold) | all cloud conditions |
O3 tropospheric column | 25% (goal) / 40% (threshold) | cloud fraction < 20% |
NO2 tropospheric column | 1.5 x 1015 molec/cm2 or 30% (goal)/50% (threshold) | cloud fraction < 20% |
HCHO total column | 1.5 x 1016 molec/cm2 or 50% (goal)/100% (threshold) | cloud fraction < 20% |
SO2 total column | 1.0 x 1016 molec/cm2 or 80% (goal)/100% (threshold) | cloud fraction < 20%, pollution cases |
CHOCHO total column | 7.0 x 1014 /cm2 or 50% | total column > 5 x 1014molec/cm2 cloud fraction < 20% |
Aerosol optical depth | 0.05 (from surface product) | cloud free |
Aerosol layer height | 1 km | AOD > 0.3 at 760 nm, layer height > 1.5 km |
Aerosol index | 0.3 (goal) / 0.5 (threshold) | all cloud conditions |
Surface | first BRF parameter 0.01 | cloud free |
Clouds | TBD by L2 developers |
|
Grating Reflection Unit of the UVN Spectrometer
The Fraunhofer IOF (Institute of Applied Optics and Precision Engineering), Jena, Germany is developing the optical gratings for the near-infrared spectral channel together with its isostatic mounts. The grating operates in the spectral band between 750nm and 775nm wavelength and is based on a dielectric reflection grating. Such grating concepts have been initially developed for the manipulation and compression of high-power ultra-short laser pulses. However, they also have a number of advantageous properties for spectroscopic applications . In particular, the required high angular dispersion in combination with an extremely low polarization sensitivity of the diffraction efficiency is not achievable with alternative concepts on the basis of metallic reflection gratings. Therefore, the dielectric reflection grating concept is transferred to spaceborne spectrometers for the first time in the frame of the Sentinel-4 project. 15)
The NIR-grating is part of the grating assembly which in addition comprises the NIR spectrograph aperture stop, the mechanical grating mount, the Co-Registration compensation device, the mechanical structure providing mechanical interfaces between grating assembly and the NIR spectrometer optics assembly, and alignment targets allowing for an accurate optical position and tilt measurement. The first three items, being the grating itself, the aperture stop, and grating mount establish the so called grating unit. Its construction and manufacturing is in the responsibility of the Fraunhofer IOF.
Grating design: According to the optical design of the Sentinel-4 NIR Spectrograph the dispersive component is a reflection grating having a period of p=797 nm and being illuminated under 24.5° incidence angle. Table5 summarizes the main optical performance requirements of the grating.
Spectral band | 750-775 nm |
Grating area | Elliptical, 55.6 mm x 60.8 mm diameter |
Groove density | 1255.2±0.5/mm |
Efficiency of nominal diffraction order | ή-1 > 70% |
Efficiency of 0th and -2nd diffraction order | <30% |
Center of FOV (Field of View) | ax=0.00º; ay=24.50º |
Elliptical FOV | ax=2.0º; ay=0.1º |
Spherical WFE (Wave Front Error) | <40 nm RMS |
Aspherical WFE | <20 nm RMS |
Polarization sensitivity | <4% |
Maximum difference of pol. sensitivity for any wavelength within system spectral range | <1.8% |
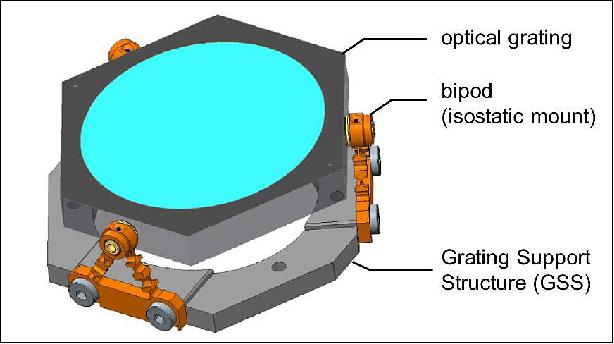
Mechanical design of the grating unit: The sensitive Optical Grating needs to be fixed to the Co-Registration Assembly in a way that its optical performance remains stable after mounting and during its operation over the full mission lifetime. Therefore, a stable mounting framework which provides a simple and reliable mounting interface to the Co-Registration Unit of the complete Grating Assembly has been developed. This mounting framework consists of the grating mounts and the GSS (Grating Supporting Structure), which represents the mechanical interface to the Co-Registration Unit.
The mounting concept has to ensure an almost deformation free kinematic fixation of the fused silica grating substrate. The conditions for the mount are determined by thermal and mechanical loads. Important for the arrangement is the thermal mismatch between the fused silica grating component (thermal coefficient of expansion αFS=5.1 x 10-7 K-1) and the metallic base plate composed of a Titanium alloy (CTE αM=8.5 x 10-6 K-1). Furthermore, the mechanical properties given by the E-module (fused silica: 72 GPa; Ti-alloy: 115 GPa) are of importance. The mentioned values already show the problem of a hybrid set-up and the requirement to reduce thermal and mechanical stresses.
The choice of Titanium as material for the mount is driven by a high tensile strength, a low mass, and low thermal conductivity. Especially the high tensile strength allows for the construction of small cross sections of joint structures and thus to achieve a high degree of decoupling. The low thermal conductivity ensures a thermal isolation of the grating component. Critical thermal gradients between mounting points are reduced and the resulting thermal deformations remains weak.
The proposed concept is based on a kinematic defined grating fixture via 3 isostatic mounts. These mounts are realized as bipods and bind all 6 degrees of freedom. The mount of the grating substrate is decoupled radially symmetric and compensates the expansion difference of the relevant materials. Therefore, the center position of the grating remains fixed in case of temperature changes. The axial expansion is determined by the bipod height and half of the substrate thickness considering the relevant expansion coefficients. The mounting of the grating to the bipods is done using Invar-pins directly glued to the fused silica substrate using a suitable space qualified glue. The bipods are then screwed to the GSS made of Titanium. In order to suppress spurious reflections from the mechanical mount the GSS is coated with Acktar fractal black.
An additional novelty of the developed concept is the direct integration of the grating aperture into the grating surface. The aperture is formed by a so-called black-chromium layer which exhibits a reflectivity well below 5% over the relevant spectral band. This layer is also structured in a lithographic process ensuring a very high position- and size-accuracy in the range of a few micrometers only. The direct integration of the aperture into the grating surface allows for a significant simplification of the mechanical grating mount as it avoids the need for a separate mechanical diaphragm.
This mounting framework allows the grating unit to be treated as a stable, self-standing subassembly for the purpose of integration into the Grating Assembly.
Optical performance: The QM (Qualification Model) of the Sentinel-4 NIR grating has been extensively characterized to validate its compliance with the optical requirement specifications (Table 5). The performed measurements include a characterization of the spectrally and spatially resolved diffraction efficiency, polarization sensitivity, straylight performance, and wave-front quality.
In a first measurement the diffraction efficiency of the nominal -1st diffraction order has been mapped across the grating area for the two extreme polarizations (TE, TM) at a set of 6 discrete wavelengths for an fixed angle of incidence of ϑm=24.5°. The used light source was a tunable laser diode with a bandwidth of 0.1nm. Figures 9 and 10 show a mapping of the measured diffraction efficiency across the grating area for λ=765 nm and the spatially averaged spectral dependency of the efficiency, respectively.
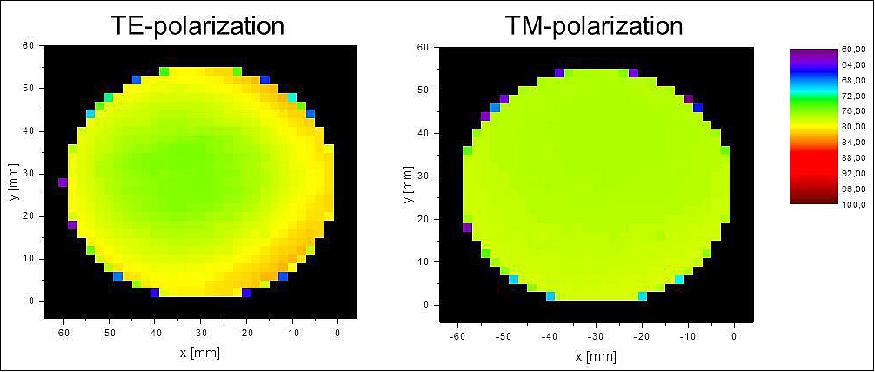
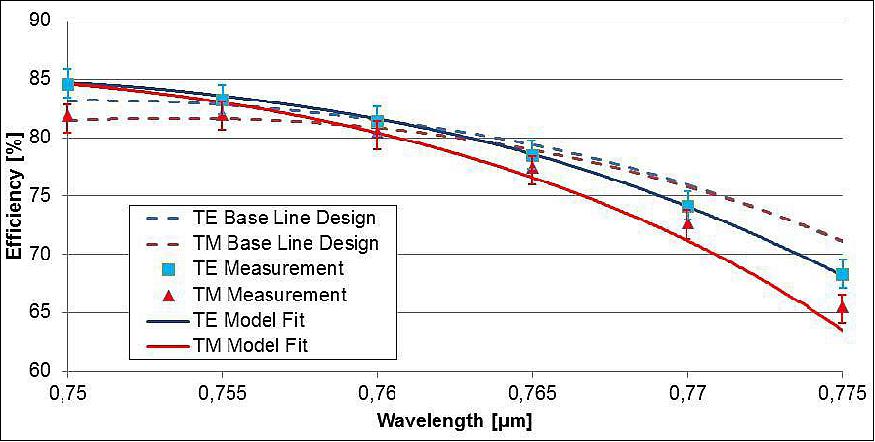
The measurement results show that the efficiency requirement is fulfilled for wavelengths λ <772nm. Between 772 and 775 nm wavelength the efficiency is below the requirement of ή>70% with a minimum of 66.9% at λ=775nm. After a detailed analysis of this situation it could be shown that this deviation is a consequence of a spectrally shifted reflection curve of the dielectric layer stack under the grating by about 10 nm towards shorter wavelengths. As the overall systems concept of the NIR-spectrometer contains some margin for the overall transmission it was finally concluded that this deviation is considered uncritical. - The polarization sensitivity derived from the measurements in Figure 10 has a maximum of 2.04% being fully compliant with the requirement of PS<4%.
The stray-light performance of the QM-grating has also been characterized by a measurement of the 2D BRDF (Bidirectional Reflection Distribution Function) using the ALBATROSS setup available at the Fraunhofer IOF. This measurement has been performed at a wavelength λ=770 nm and at a fixed angle of incidence of 24.5º. Cross sections extracted from the 2D BRDF along and perpendicular to the dispersion direction are displayed in Figure 11.
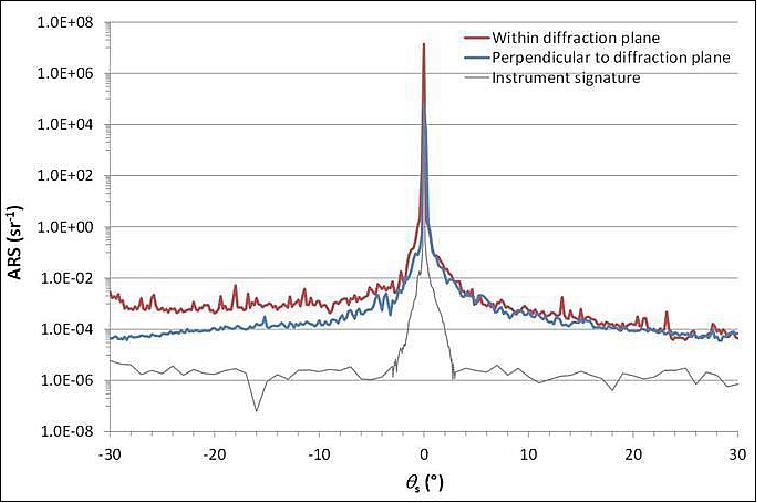
The displayed curves reveal compliance of the grating with the straylight requirement. In particular, there are no ghost peaks observable which would indicate positioning imperfections of the sequential lithographic exposure process.
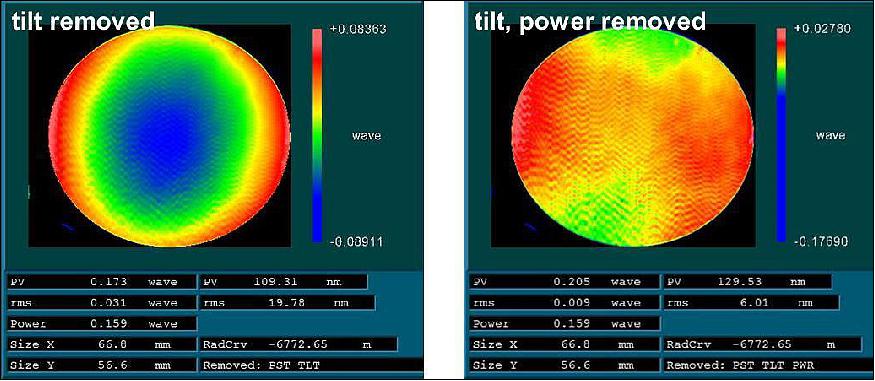
The surface quality of the Sentinel-4 GRU (Grating Reflection Unit) QM grating has been characterized interferometrically during different steps of the mounting process. Figure 12 shows the wavefront measurement just before the mechanical integration of the grating into the Grating Unit. The wavefront error is 19.8 nm (rms) and 6.0 nm (rms) including and excluding the spherical contribution, respectively.
Additional measurements of the integrated Grating Unit have shown no degradations of the wavefront performance due to the mounting process. Thus, the grating fulfills the wavefront requirements with a comfortable margin.
Sun Baffle of the UVN Instrument
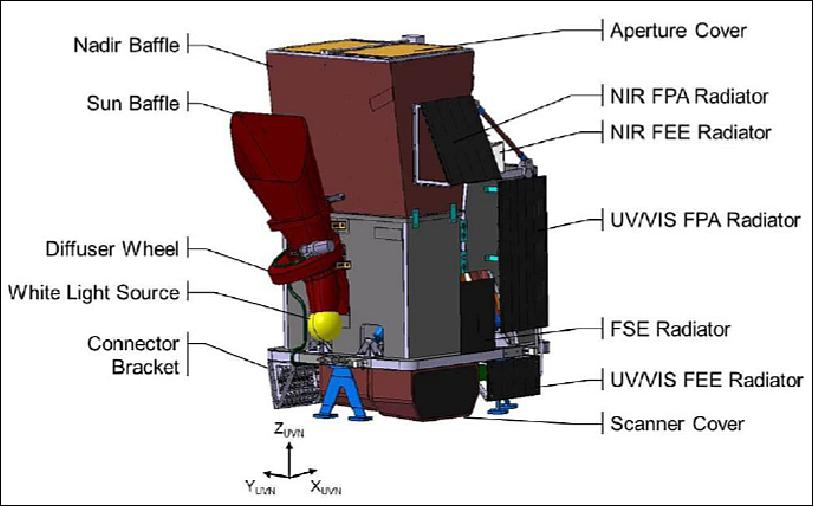
The Sentinel-4 mission (S4) is part of the Copernicus initiative and covers the needs for continuous monitoring of Earth atmospheric composition and air pollution. Sentinel-4/UVN is one of its instruments, a high resolution spectrometer operating in 3 spectral domains: UV (305-400 nm), VIS (400-500 nm) and NIR (750-775 nm). A sketch of UVN is presented on Figure 13. 16)
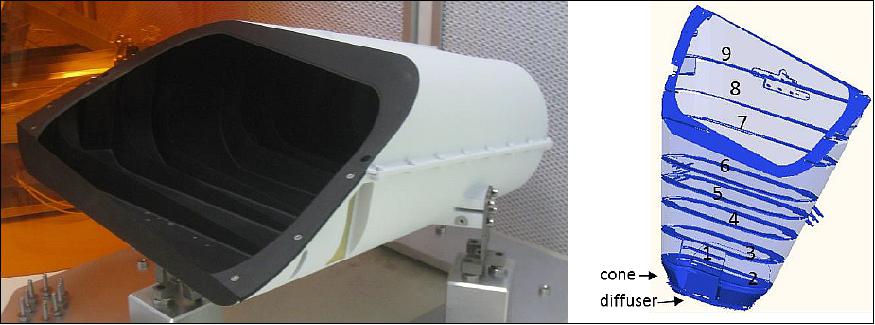
The radiometric accuracy of the UVN instrument partly relies on regular in-orbit re-calibrations: the goal is to determine, for example, the sensor gain factors and their drifts due to aging and exposition to operation conditions. One of the in-flight calibration approaches consists in the measurements of the sun's irradiance as transmitted by a diffuser. Thanks to a diffuser wheel, several diffusers can be used to crosscheck the calibration in case the diffuser performance would drift too. The calibration assembly (CAA) includes a sun baffle, which ensures the straylight rejection for the sun calibration. This paper presents the design and straylight analysis of the baffle, as well as its experimental testing.
The goal of the sun baffle is to block earth shine and to provide a sun straylight below 0.2% inside the UVN field of view (±2.1° × ±0.1059°). The sun calibration is performed regularly and for directions included inside theFOV (Field of View) defined by the 4 direction cosines vSun of Table 6. Based on these constraints, the baffle was designed; respectively ±0.27° and ±8.74° angular divergence for the sun and earth illumination were considered. Figure 14 shows a picture of the sun baffle and a 3D sketch extracted from the ray-tracing software FRED. Because the Earth position relative to the instrument is fixed, the baffle is asymmetric with the larger part on the side of the Earth (Figure 15-a).
Direction | X | Y | Z |
vAxis | 0.374705 | -0.203129 | -0.904618 |
vSun1 | 0.381322 | -0.431141 | -0.817747 |
vSun2 | 0.308599 | -0.431141 | -0.847870 |
vSun3 | 0.341790 | 0.036644 | -0.939062 |
vSun4 | 0.422334 | 0.036644 | -0.905699 |
vEarth | 0 | 0 | -1 |
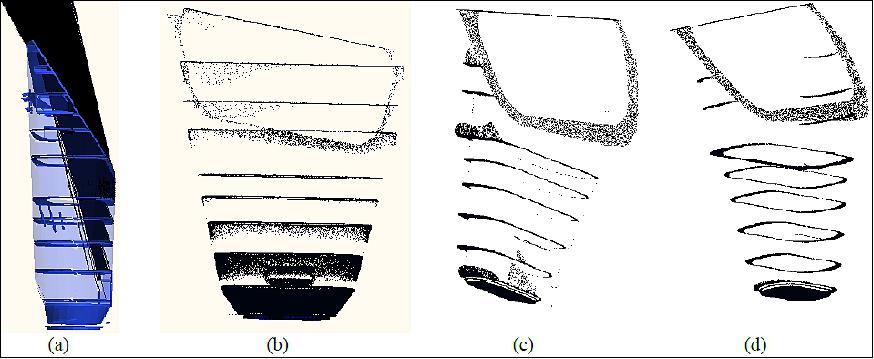
A sun baffle has been designed, built and tested for the UVN embedded calibration assembly. The baffle has been designed to minimize the surfaces which are at the same time illuminated from the scene and seen from the detector. A straylight analysis has been performed with the non-sequential ray-tracing software FRED and a coating trade-off has led to the decision of using inorganic black anodization coating on the entire baffle except for a cone at the bottom of the baffle which is acktar coated. Experimental characterization has been performed in the clean room of the Space Center of Liège and confirms the straylight rejection performance of the system.
Ground Segment
The Sentinel-4 Ground Segment elements are integrated and embedded within the EUMETSAT MTG ground segment. They comprise the following elements (Ref. 12):
1) The Sentinel-4 Level 1b and Level 2 processors
2) The generic and multi-mission supporting functions of the EUMETSAT MTG PDGS (Payload Data Ground Segment ) and FOS (Flight Operations Segment)
3) The Sentinel-4 ground segment system interfaces.
These ground segment interfaces are manifold at various levels:
- Sentinel-4 Payload (S4/UVN) to Sentinel-4 L1b Processors. This interface is part of the MTG Space-to-Ground Interface
- MTG Ground Segment to S4/UVN Level 2 Processor interface for non-S4 data required for processing
- Sentinel-4 User Interface like to i) the Copernicus User Community, ii) the Sentinel-4 Expert Users, iii) the Copernicus Space Component Coordinated Data Access System (CCS CDS)
- Sentinel-4 Level 2 Interface to ECMWF and other auxiliary providers (TBC)
- Sentinel-4 L1b Processor Interface to Sentinel-4 Image Quality Tool (IQT) which is part of the MTG-S IQT
- Interface with the ESA Sentinel-4 Mission Management. This interface is assumed to be a procedural interface.
References
1) G. Bazalgette Courrèges-Lacoste, M. Arcioni, Y. Meijer, J.-L. Bézy, P. Bensi, J. Langen, "Sentinel-4: The Geostationary Component of the GMES Atmospheric Monitoring Mission," Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
2) http://esamultimedia.esa.int/docs/S4-Data_Sheet.pdf
3) Mark R. Drinkwater, "ESA's Living Planet Programme: Atmosphere Explorer and Sentinel Missions," May 2010, URL: https://web.archive.org/web/20160324164516/http://earth.esa.int/workshops/Volcano/files/ESA_future_missions.pdf
4) Grégory Bazalgette Courrèges-Lacoste, Berit Ahlers, Benedikt Guldimann, Alex Short, Ben Veihelmann, Hendrik Stark, "The Sentinel-4/UVN instrument on-board MTG-S," URL: [web source no longer available]
5) Hendrik R. Stark, Hermann Ludwig Möller, Grégory Bazalgette Courrèges-Lacoste, Rob Koopman, Silvia Mezzasoma, Ben Veihelmann, "The Sentinel-4 mission and its implementation," Proceedings of the ESA Living Planet Symposium, Edinburgh, UK, Sept. 9-13, 2013 (ESA SP-722, Dec. 2013)
6) Sentinel-4, ESA, Factsheet, URL: http://www.spaceoffice.nl/blobs/spaceplaza/files/s4data_sheet.pdf
7) "Copernicus: new name for European Earth Observation Programme," European Commission Press Release, Dec. 12, 2012, URL: http://europa.eu/rapid/press-release_IP-12-1345_en.htm
8) Paul Ingmann, Ben Veihelmann, Anne Grete Straume, Yasjka Meijer, "The status of implementation of the atmospheric composition related GMES missions Sentinel-4/Sentinel-5 and Sentinel-5p," Proceedings of the 2012 EUMETSAT Meteorological Satellite Conference, Sopot, Poland, Sept. 3-7, 2012, URL: http://tinyurl.com/oamraoh
9) "The EUMETSAT Council resolution approving the full Meteosat Third Generation (MTG) program entered into force on 25 February 2011," EUMETSAT Newsletter, May 12, 2011, URL: [web source no longer available]
10) Ben Veihelmann, Yasjka Meijer, Joerg Langen, Paul Ingmann, Rob Koopman, Norrie Wright, Gregory Bazalgette Courreges-Lacoste, Giorgio Bagnasco, "The Sentinel-4 Mission and its Atmospheric Composition Products," ATMOS Conference 2015, Heraklion, Crete, Greece, June 8-12, 2015, URL: http://seom.esa.int/atmos2015/files/presentation69.pdf
11) "Astrium to build ESA's Sentinel-4 atmospheric sensors," ESA, July 11, 2011, URL: http://www.esa.int/esaCP/SEMFSJ9TVPG_index_0.html
12) Hendrik R. Stark, Hermann Ludwig Möller, Grégory Bazalgette Courrèges-Lacoste, Rob Koopman, Silvia Mezzasoma, Ben Veihelmann, "The Sentinel-4 mission, its components and its implementation," Proceedings of the Joint EUMETSAT /AMS Meteorological Satellite Conference to address issues on Weather, Climate, Oceans and the Environment, Vienna, Austria, Sept. 16-20, 2013, URL: http://www.eumetsat.int/website/wcm/idc/idcplg?IdcService
=GET_FILE&dDocName-PDF_CONF_P_S1_10_STARK_V&Revision
SelectionMethod=LatestReleased&Rendition=Web
13) Heinrich Bovensmann, Stefan Noël, Klaus Bramstedt, John P. Burrows, R. Siddans, C. Standfuss, E. Dufour, B. Veihelmann, "Expected Level 2 Performance of Sentinel 4 UVN on MTG and the impact of scene inhomogeneity," ESA ATMOS (Atmospheric Science Conference) 2012, Bruges, Belgium, June 18-22, 2012, URL: http://congrexprojects.com/docs/12m06_docs2/8_bovensmann_public.pdf
14) Grégory Bazalgette Courrèges-Lacoste, Berit Ahlers, Benedikt Guldimann, Alex Short, Ben Veihelmann, Hendrik Stark, "The Sentinel-4/UVN instrument on-board MTG-S," EUMETSAT, URL: [web source no longer available]
15) U. D. Zeitner, A. Kamm, T. Benkenstein, T. Flügel-Paul, G. Leibeling, "Development of the flight models for the Sentinel-4/UVN NIR-Grating Unit," Proceedings of the ICSO 2016 (International Conference on Space Optics), Biarritz, France, 18-21 October, 2016, URL: http://esaconferencebureau.com/custom/icso/2016/index.htm
16) L. Clermont, P. Blain, E. Mazy, J.Y. Plesseria, B. Marquet, Y. Stockman, "Design and tests of the sun baffle for the Sentinel-4 UVN embedded Calibration Assembly," Proceedings of the ICSO 2016 (International Conference on Space Optics), Biarritz, France, 18-21 October, 2016, URL: http://esaconferencebureau.com/custom/icso/2016/index.htm
17) SpaceX, “MTG-S1 Mission”, July 1, 2025, URL: https://www.spacex.com/launches/mission/?missionId=mtgs1
18) ESA, “MTG-S1 and Sentinel-4 take a step closer to space”, May 7, 2025, URL: https://www.esa.int/Applications/Observing_the_Earth/Meteorological_missions/meteosat_third_generation/MTG-S1_and_Sentinel-4_take_a_step_closer_to_space