Artemis-I (Exploration Mission-1)
Non-EO
NASA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | NASA |
| Launch date | 16 Nov 2022 |
| End of life date | 11 Dec 2022 |
Artemis I — Orion / EM-1 (Exploration Mission-1)
Orion Vehicle ESM Development Status Payloads References
In March 2018, NASA renamed the former Orion / EM-1 (Exploration Mission-1) to Artemis I. Artemis I will be the first integrated test of NASA’s deep space exploration systems: the Orion spacecraft, Space Launch System (SLS) rocket and the ground systems at Kennedy Space Center in Cape Canaveral, Florida. The first in a series of increasingly complex missions, Artemis I will be an uncrewed flight test that will provide a foundation for human deep space exploration, and demonstrate our commitment and capability to extend human existence to the Moon and beyond. 1)
Orion EM-1, previously known as SLS-1 (Space Launch System-1) is NASA's first planned flight of the Space Launch System and the second uncrewed test flight of the Orion MPCV (Multi-Purpose Crew Vehicle). NASA, ESA, European and US Industry have teamed to develop the ORION spacecraft.
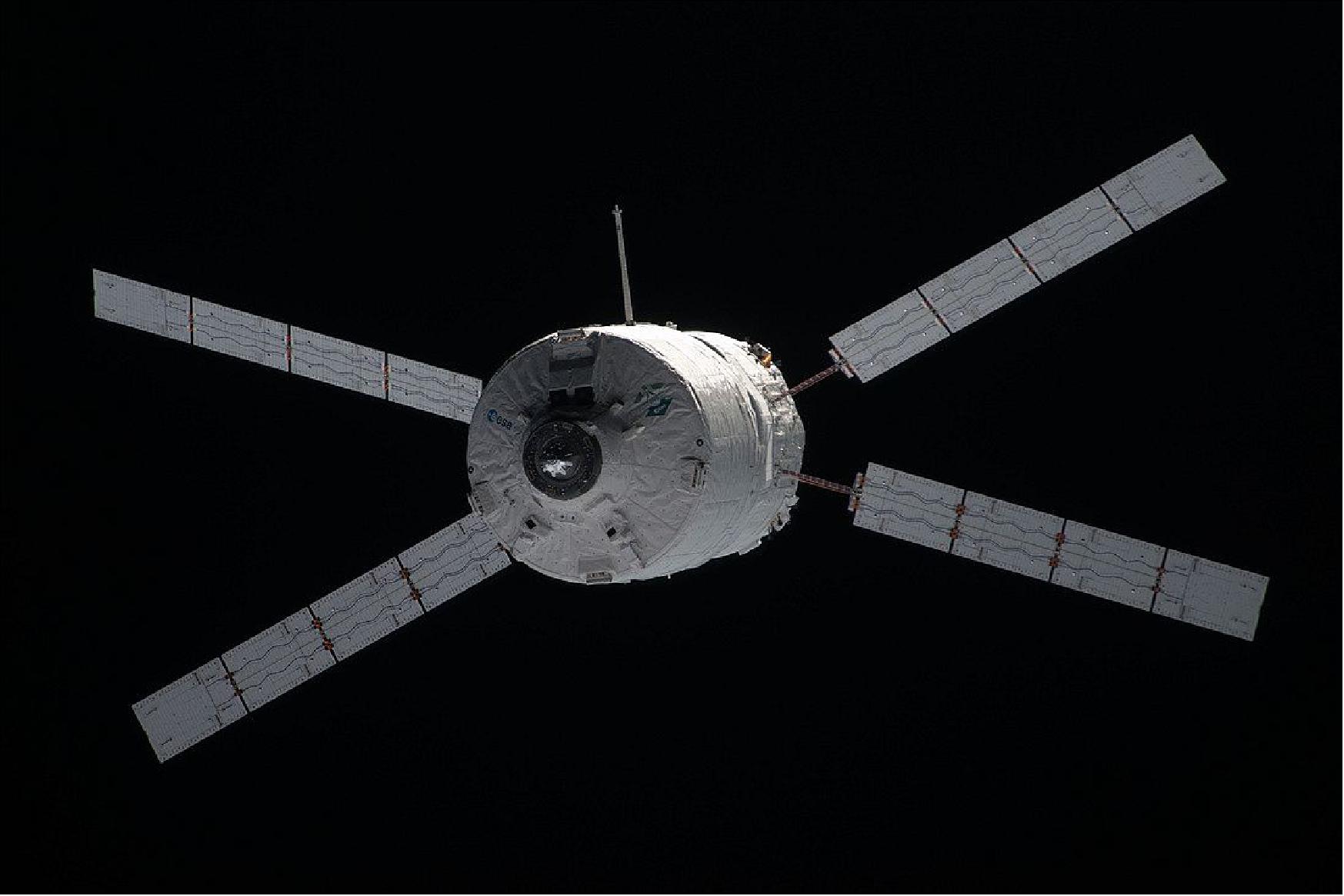
Under an agreement between NASA and ESA, ratified in December 2012, NASA’s new Orion vehicle for human space exploration missions includes the ESM (European Service Module), based upon the design and experience of ESA’s ATV (Automated Transfer Vehicle), the supply craft for the ISS (International Space Station).
ESA’s industrial prime contractor for ATV, Airbus Defence and Space of Bremen, Germany, is leading a European industrial consortium, developing this vehicle on behalf of ESA and working closely with NASA’s Orion US industrial prime contractor Lockheed Martin Space Systems.
Orion is the spacecraft that NASA intends to use to send humans and cargo into space beyond low earth orbit and to return them safely to Earth. It is being developed for crewed missions to cislunar space, asteroids, and then to Mars. The capsule is also planned as a backup vehicle for missions to the ISS (International Space Station). It will be launched by the NASA-developed SLS (Space Launch System) in 2019. 2) 3)
The first test flight of Orion was successfully completed in December 2014 with a Delta IV launch vehicle that launched the Orion Crew Module into a high elliptical orbit to demonstrate high-speed atmospheric Earth re-entry. This flight test did not include the ESM.
It is planned such that the Orion EM-1 flies a mission profile similar to what might be used in a future asteroid redirect mission. The un-crewed Orion travels to a lunar DRO (Distant Retrograde Orbit) mission (Figure 13), then returns on a trajectory calculated to achieve a high speed atmospheric entry on the order of ~11 km/s to demonstrate the performance and effectiveness of the Orion TPS (Thermal Protection System), as well as relevant environments prior to the first manned launch of the system. The total mission duration is 25 days (6 at destination). This will be the first flight of the ESM.
The NASA Exploration Program – Journey To Mars
The human exploration of space is a national policy of the government of the United States. The National Space Policy directs NASA to: 4) 5) 6)
• Set far reaching exploration milestones. By 2025, begin crewed missions beyond the moon, including sending humans to an asteroid. By the mid-2030s, send humans to orbit Mars and return them safely to Earth.
• Furthermore, the NASA Authorization Act of 2010, a law passed by the U.S. Congress and signed by the President, states that the “long term objective for human exploration of space should be the eventual international exploration of Mars.”
NASA is implementing this policy as the Journey to Mars, a journey that will be neither quick nor easy. 56 million kilometers away at its closest approach, with an atmosphere too thin for easy braking but too thick to ignore, with freezing surface temperatures, a minimal magnetic field for radiation protection, and communications delays with Earth of up to 40 minutes, Mars represents the current high frontier in human exploration.
Even though Mars is tremendously challenging, it has resources necessary for human exploration (oxygen, CO2 atmosphere, and water). These resources are critical to allow us to break the ties with Earth and become Earth Independent. The atmosphere, even though very thin by Earth standards, still provides some radiation shielding. Developing the ability to utilize the resources on Mars will be critical for the journey. We have calculated that roughly 20 mt of oxygen will be needed for the human Mars ascent vehicle to achieve orbit around Mars. Rather than carry all of the propellant and oxygen needed for a Mars ascent vehicle, we will generate that propellant from the materials available on Mars.
The challenges are too difficult to tackle all at once. Instead, NASA is breaking it down into more manageable objectives: the Earth Reliant phase, the Proving Ground phase, and the Earth Independent phase. Each phase builds upon the successes (and failures) of the previous one in a sustainable, repeatable, and in manner that allows for changes in technology or funding. In this approach NASA does not need to develop and control all aspects of the journey. NASA will utilize the private sector and international partners in critical roles of the journey and depend on these partners for successful achievement of the overall journey.
Earth Reliant: NASA is operating in the Earth Reliant phase of the Journey to Mars aboard the ISS (International Space Station) right now. The ISS, orbiting some 400 km above Earth, is mere hours away from the safety and comfort of our home planet. Aboard the space station, NASA and the other international partners are developing the technologies needed to sustain human life much farther away than 400 kilometers. A new and varied fleet of commercially produced and procured vehicles is taking over the duties of transportation of humans and cargo from Earth to ISS. NASA’s investments in this area promise to create new opportunities for the development of LEO, including broader use of the ISS as an orbital science laboratory and as a demonstration platform for future commercial space facilities as NASA moves towards the Proving Ground phase.
In the Earth Reliant phase, NASA is developing the “Mars-capable” systems that will be needed for long-duration stays outside of the comfortable frontier of LEO. Currently manifested or planned experiments and demonstrations include improved long-duration life support for Mars missions, advanced fire safety equipment, next-generation spacesuit technologies, high-data-rate communications, techniques to reduce logistics, large deployable solar arrays, in-space additive manufacturing, advanced exercise and medical equipment, radiation monitoring and shielding, human/robotic operations, and autonomous crew operations.
However, these “Mars-capable” systems are not only technological, but also biological- this work includes the development and demonstration of the human systems; the countermeasures, procedures, and adaptations the crew will need to survive and thrive in deep space. NASA’s Human Research Program is actively working on identifying, mitigating, and eliminating the risks of spaceflight to the human body aboard ISS, while acknowledging that some risks- like radiation- can only be fully quantified with long-duration human exposure to the environment outside the Van Allen belt. NASA astronauts and others will also gain experience on a variety of management, operations, and maintenance styles and techniques are they begin flying to orbit onboard the Boeing and SpaceX crew vehicles.
We have a lot to learn from the Earth Reliant time on ISS. We have continuously been surprised by problems that arise on ISS, especially in the life support systems. NASA performed extensive ground testing on these systems only to be surprised by their actual performance in space. For example, the water systems were much more susceptible to bio-films and blockage than ground tests showed. Carbon dioxide removal system beds have more problems with dust generation and valve fouling than anticipated. We need to discover and solve these problems on ISS before venturing into deep space with these systems. ISS is the perfect platform for these development and testing activities.
In this Earth Reliant phase- when regular interaction and management from the ground is possible - NASA and its commercial partners will continue to return benefits to humanity on Earth while developing the skills to go farther. NASA intends to begin short-duration cislunar while ISS is still operating. It is a fundamental tenant of human spaceflight that continuity of operations be persevered, in order to maintain our progress in a sustained manner.
Earth Independence will also require a new operating philosophy with our crews. Today, the ground crews often serve as an additional ISS crew member. Many robotic activities are done from the ground while the ISS crew sleeps. During space walks the ground serves as an extra set of eyes and ears for the crew. As crews move into deep space, the crews must become more autonomous. Here again, ISS is an excellent platform to practice crew independence before it is required. Time delays between Earth and ISS can be added to simulate the real time delays associated with communication distances as will be experienced at Mars distances.
Proving Ground: Aboard NASA’s Orion spacecraft, astronauts will look down on Earth from a perspective never seen before. Far from the comparative hustle and bustle of the ISS- with the Earth speeding by the window, with 12-15 vehicle dockings per year, and with hundreds of government and commercial experiments running in constant communication with the ground- the Proving Ground will be a more secluded place. Beginning with missions of short duration and gradually building as experience is gained, the Proving Ground will allow NASA and its partners to practice with, innovate on, and demonstrate the technologies and capabilities needed to send humans to Mars, while remaining in a location near enough to Earth to allow for crew return (in a matter of days) and close monitoring of technology advancement. NASA recently issued a call for commercial industry to propose habitation concepts and solutions for the Proving Ground, continuing the partnership started in LEO.
Activities that have become what passes for routine in our industry- such as vehicle rendezvous and docking and EVA- will needed to be revalidated in cislunar space. The environmental, power, communications, and other systems that have been developed on ISS will be verified in the environment for which they were actually designed, far from regular resupply, and operating without the regularity of maintenance which they currently require.
Launching from the Kennedy Space Center in 2019, the first integrated flight of the SLS (Space Launch System) rocket and the Orion spacecraft, called EM-1 (Exploration Mission-1), will demonstrate NASA’s commitment and capability to extend human existence to deep space. The EM-1 mission will be flown without a crew. EM-1 is designed to stress the propulsion, navigation, communication, thermal, and Earth reentry systems. The mission will be the first mission flown to a distant retrograde orbit around the Moon, which is unique in that objects in this orbit will remain there without propulsive maneuvers. Testing the systems before the crew is flown is an important technique to reduce risks with the first crew missions to this remote location. The life support carbon dioxide removal system for Orion is being operated on ISS today.
The EM-1 milestone achievement will strengthen confidence in SLS and Orion as the right system design for the Journey to Mars strategy. The systems on Orion, and future deep space habitation systems, are designed to be Mars-class systems. EM-1 and subsequent missions will take these systems from Mars-class to “Mars Ready.” After a series of these missions, each increasing in duration and complexity, NASA will undertake a “shakedown cruise”- a long-duration mission using the “Mars-capable” systems, uninterrupted by outside assistance. This mission will validate the complete architecture needed to take humans to the Mars vicinity and return them to the Earth.
Earth Independent: Earth Independent systems and operations are NASA’s ultimate goal for Mars or any destination for humans beyond the Earth-Moon system. While true Earth Independence is many years away, NASA is laying the foundations for human exploration now. A fleet of robotic orbiters, landers, and rovers is on and around Mars, doing increasingly sophisticated analysis and exploration. Many of these missions have experiments explicitly dedicated to categorizing the environment humans will face; the Curiosity rover has a radiation detector that was also flown on ISS, and the upcoming Mars 2020 mission will have several more human health-related experiments. Robotic exploration is human exploration, albeit from a slightly removed distance, and both programs are tightly coordinated today. A safe human exploration of Mars cannot happen without a robust robotic foundation.
While the Earth Reliant and Proving Ground phases have been vigorously pursued and evaluated, the Earth Independent phase is less detailed. This is no accident. It will take an over a decade to get humans to Mars in a sustainable manner, and it is incumbent upon the current generation not to dictate or limit the manner that future generations will explore. While we can predict may of the needs of future explorers- radiation protection, food supply, environmental control, and so on- it is foolish to believe that our proposed technological solutions will be the ones most relevant to them. Instead, NASA is pursuing a capabilities-based approach, developing what we need as we can foresee the application. It is through this long-term view that we believe we can best serve our goal and destination of expanding the human presence in the solar system. We are developing an agile and sustainable approach to deep space exploration. Just as Apollo required a different approach to system engineering and hardware development, so too will the challenges associated with Mars-class missions require a different development approach and a new type of systems engineering. NASA and the U.S. alone cannot build all of the systems and perform all of the development needed for this adventure. NASA can orchestrate the plan, but will be dependent on the private sector and international partners for key components.
Today NASA is utilizing the ambitions of SpaceX to land a vehicle on Mars to obtain critical data on the technical considerations for using a propulsive landing capability in the Mars atmosphere. NASA is assisting SpaceX by providing deep space navigation capability and communication capability in exchange for access to SpaceX’s data on retro-propulsion Martian entry descent and landing data. NASA has also placed the European Space Agency in the critical path for all of its human deep space exploration capability by partnering with ESA to provide the Orion service module. The service module provides thermal control, power generation life support consumables storage and propulsion for Orion, allowing it to return to Earth from a distant retrograde orbit around the Moon. These functions are critical to keeping the crew safe on Orion.
A Marketplace Above: As NASA prepares to move beyond low Earth orbit, it is our goal to facilitate an orderly, timely, and profitable transition from government tenancy in LEO to the commercial sector. Through NASA’s commercial development programs, we have already demonstrated the ability of the private sector to deploy reliable launch and return vehicles for cargo to the ISS. In the near future, we are aiming to repeat that feat by using the world’s first commercially developed crew vehicles for ISS transportation. Earlier this year, with NASA’s assistance, the first commercially-developed expandable module was deployed onboard ISS.
Learning the benefits and issues with expandable modules directly in flight will provide criticality data for future planning. Rather than speculating on the properties of this new technology, direct on-orbit performance will be recorded. In ISS’s normal mode of operations, we see dozens of commercial payloads operating every day, from biological research to materials development to CubeSat deployment. The Center for the Advancement of Science (CASIS), NASA’s chosen operator for the U.S. National Laboratory portion of the ISS, is actively developing new markets and new opportunities for companies and even industries that have never previously considered spaceborne research. The goal is to expose the private sector directly to unique properties of space for their terrestrial based processes and let them see if there is a potential revenue generating opportunity in spaceborne research and manufacturing. These private sector companies can utilize to explore and test revenue generating concepts without a major investment in infrastructure. Transportation for both cargo and crew is already available from the private sector.
At the moment, the ISS is the only system in LEO. NASA and its international partners- Canada, Japan, and Russia- have committed to operating the ISS through at least 2024 (European confirmation of support is expected later this year). NASA does not intend to continue owning and operating a LEO platform. Through the research and development onboard ISS, we are trying to help create a new marketplace for both supply and demand in LEO- one where companies that require access to LEO for research or even production contract directly with companies that can provide transportation and logistics, without government involvement. We expect many of the approaches pioneered for commercial utilization of LEO will also have applications in NASA’s deep space activities. Commercialization of LEO (Low Earth Orbit) is the next frontier for private companies for both those that want to provide access and accommodations in space, and those that require the same.
The commercial LEO environment will likely be very different than ISS. It is unlikely that a facility as large and complex as the ISS will be built in LEO by the private sector. The facilities for the private sector are likely to be single purpose laboratories. The facilities could be crew tended and primarily ground operated. The facilities could also be extensions of current cargo vehicles or crew vehicles such as Cygnus, Dragon Lab or Dreamchaser. The facilities need to have low operating costs and reflect the revenue generation potential of the space research. The goal is a rich LEO research and manufacturing environment supported by a private sector transportation infrastructure.
Conclusion: It is a modern cliché to say that every generation believes they are living in a special time, with choices to be made that will positively or negatively affect the very future of humanity. It is true that the promise of Mars exploration and space commercialization has been made and broken- before, and it is tempting to believe that this time will be no different. However, we are at a point in space travel that is demonstrably unprecedented in human history. Privately developed and operated vehicles are delivering cargo to an international outpost that has been continually crewed for 15+ years, onboard which a commercial module is undergoing testing, and NASA has asked for concepts for the private sector to use the ISS to accelerate their development of revenue generation from space.
Private companies can now develop their own rockets and propulsion systems and sell them on the open market. Inside the ISS, experiments in nearly every scientific field are being conducted by commercial, industrial, and academic organizations, some of which are even looking to space as a production environment. We are also flying numerous pieces of terrestrial research equipment such as DNA sequencers. The private sector no longer needs to develop custom equipment but can fly their off-the-shelf research equipment to space. In the near future, commercial companies will begin ferrying astronauts to and from the ISS. And in public, in forums such as this, NASA is explicitly saying that not only is a commercial marketplace its desired and primary outcome for LEO, it is saying that a robust commercial space market is a fundamental building block for deep space human exploration.
Things are changing. As the Earth Reliant phase exits governmental control, NASA will take both its international and commercial partners to the Proving Ground, where we will learn to live and work farther from Earth than ever before in a sustainable manner. There is no set path for this journey to Mars- merely a set of frontiers that must be broken. There is no final frontier only the next one in front of us. We are beginning an exciting journey to move human presence off of the Earth and into the solar system.
Launch
Artemis I (former Orion EM-1) will launch uncrewed on the maiden test flight of NASA’s SLS (Space Launch System). NASA has reserved three days in late August and early September for the first launch of its Space Launch System rocket to send the Orion spacecraft to orbit around the moon and back. 7)

- At a July 20 briefing, NASA officials announced that they had target launch dates of Aug. 29, Sept. 2 and Sept. 5 for the Artemis 1 mission, an uncrewed test flight of the Orion spacecraft and the first launch of the SLS. Orion will spend up to six weeks in cislunar space before splashing down off the coast of San Diego.
- “We think we’re on a good path to get to attempts on those dates,” Jim Free, NASA associate administrator for exploration systems development, said on the call.
- Crews have been working on SLS and Orion since it returned to the Vehicle Assembly Building (VAB) July 2 after the fourth wet dress rehearsal test, where the rocket was loaded with liquid oxygen and liquid hydrogen propellants and put through a practice countdown. That included work to fix a liquid hydrogen leak on the core stage found during that test.
- During that work, technicians discovered a loose fitting, called a collet, where the liquid hydrogen umbilical connects to the rocket. That required going into the rocket’s engine section to tighten the fitting. “That actually gave us a little pause of wondering if we were going to be able to make a launch date on those three dates,” Free said. With those repairs complete, he said he was more confident about being ready for those dates.
- Free and other NASA officials on the call cautioned they still had work to perform on both SLS and Orion to get the vehicles ready for launch. If those preparations remain on schedule, the vehicle would roll back out to Launch Complex 39B around Aug. 18, although a final decision on proceeding with a launch attempt would come only after a flight readiness review about a week before launch.
- The three launch dates have different launch windows and mission durations:
a) The Aug. 29 launch window opens at 8:33 a.m. EDT for two hours, and would result in a 42-day mission ending with a splashdown Oct. 10.
b) The Sept. 2 launch window opens at 12:48 p.m. EDT for two hours, and would result in a 39-day mission splashing down Oct. 11.
c) The Sept. 5 launch window opens at 5:12 p.m. EDT for 90 minutes, and would result in a 42-day mission splashing down Oct. 17.
- All three are considered “long-class” missions by NASA, while launch opportunities on other days instead support shorter missions lasting about four weeks. “We don’t have a strong preference of whether it’s a short- or long-class mission,” said Mike Sarafin, NASA Artemis mission manager. Both support all the mission objectives of testing the launch vehicle and spacecraft, with a particular emphasis on demonstrating Orion’s heat shield on a reentry at lunar return velocities.
- One complication for launch planning is the batteries for the rocket’s flight termination system (FTS). That includes conducting a launch no more than 20 days after a final test of the system. “With our three attempts, we do have issues with that timing,” said Cliff Lanham, senior vehicle operations manager in NASA’s Exploration Ground Systems program. NASA is working with the Eastern Range to see if there are ways to address that issue.
- Another issue is that the FTS batteries are located on portions of the SLS not accessible at the pad. That means that, if the vehicle rolls out to the pad in August but does not launch by Sept. 5, it would have to return the VAB for additional testing and reset of the clock.
- That would make it difficult to have the vehicle ready for the next launch period, which runs from Sept. 20 to Oct. 4. “That would be a real challenge for us, to be honest with you,” Lanham said of launching during that timeframe. “But we would certainly give it our best shot.” The following launch period runs from Oct. 17 to 31.
• March 18, 2022: One of the many milestones in the leadup to the launch of Artemis is its rollout: this is when a crawler will carry the SLS rocket with Orion and ESM (European Service Module) from the Vehicle Assembly Building (VAB) to launchpad 39B. 8)
• February 10, 2022: The Orion spacecraft with European Service Module will fly farther from Earth than any human-rated vehicle has ever flown before. This video gives an overview of the first mission – without astronauts – for Artemis, focussing on ESA’s European Service Module that powers the spacecraft. 9)
- The total trip will take around 20 days, ending with a splashdown in the Pacific Ocean without the European Service Module – it separates and burns up harmlessly in the atmosphere.
- The second Artemis mission will have a similar flight plan but with astronauts. The third Artemis mission will see astronauts taken to the lunar surface.
- The European Service Module is ESA’s contribution to NASA’s Orion spacecraft that will send astronauts to the Moon and beyond. It provides electricity, water, oxygen and nitrogen as well as keeping the spacecraft at the right temperature and on course.
- The European Service Module has 33 thrusters, 11 km of electrical wiring, four propellant and two pressure tanks that all work together to supply propulsion and everything needed to keep astronauts alive far from Earth – there is no room for error.
• February 2, 2022: NASA is postponing the rollout of the first Space Launch System for a final prelaunch test by a month to give workers more time to complete vehicle preparations. 10)
- NASA announced Feb. 2 that it was delaying the rollout of the SLS from the Vehicle Assembly Building to Launch Complex 39B for a fueling test and practice countdown called a wet dress rehearsal. NASA officials said as recently as mid-January that they expected the vehicle to roll out to the pad in mid-February for that test.
- Instead, said Tom Whitmeyer, deputy associate administrator for exploration systems development at NASA Headquarters, that rollout will likely take place in mid-March. He said in a call with reporters it was too soon to give a more specific date for that rollout given the work still ahead for crews.
- Unlike in December, when a faulty engine controller, or computer that controls one of the SLS’s RS-25 engines, delayed a rollout then scheduled for the first half of January, there is no single issue causing this latest delay. “We just have a lot of things we need to close out,” Whitmeyer said. “It’s a big vehicle. There’s a lot of instrumentation that needs to be finished.”
- “There really isn’t a significant thing that we’re working,” added Mike Bolger, manager of NASA’s Exploration Ground Systems program. “It’s just the volume of work and it’s us being really meticulous and making sure that, when we roll, we’re ready.”
- Another factor has been the pandemic, including the recent surge in cases linked to the omicron variant. “I think that caught everybody off guard just by the sheer number of cases,” Bolger said. “It has slowed us down some.” He added, though, that the situation appeared to be improving as the number of new cases drops.
- That delay rules out a launch of the uncrewed Artemis 1 mission in March, as agency officials had previously been hoping for. Instead, NASA is looking at two-week windows from April 8 to 23 and from approximately May 7 to 21 as launch opportunities for Artemis 1. The windows are governed by the performance of the SLS and mission constraints, such as having the Orion spacecraft splash down in daylight conditions.
- That schedule will depend on the vehicle’s performance during the wet dress rehearsal. Bolger said it should take about two weeks to complete the full series of tests on the pad, from checks of vehicle interfaces on the pad through the full tanking test and practice countdown.
- That time frame is approximate, though. “We do have some first-time uncertainties, but then some standard uncertainties,” said Mike Sarafin, Artemis 1 mission manager. The first-time uncertainties involve activities not done before, such as rolling the full SLS out to the pad and linking it to pad infrastructure. Standard uncertainties, he said, involve issues like weather that could delay the rollout and testing.
- As in the past, agency officials said they don’t plan to set a launch date for Artemis 1 until after the wet dress rehearsal is complete. “We really don’t know until we do the wet dress rehearsal how much additional time it will take to get ready for launch,” Whitmeyer said. “We hope it won’t be a significant amount of time.”
- Engineers are also continuing to study the engine controller problem that caused the delay in December. “We think we’ve isolated the cause of the problem,” he said, with an update on the issue expected in a couple of weeks. The issue needs to be cleared before launch, but would not delay the wet dress rehearsal.
- Delays in the launch should not pose an issue for the SLS’s two five-segment solid rocket boosters. When NASA started stacking the boosters a year ago, agency officials said the boosters were certified for 12 months, but that testing could extend that limit.
- “We would run into this problem periodically with the shuttle as well,” Whitmeyer said. Testing and data analysis, he said, allows them to extend the life of the boosters in their stacked configuration. “Right now on the boosters, we don’t really see this as a risk, even if we proceed on further into the year. We think we’re in OK shape.”
• October 27, 2021: Integration of the Orion spacecraft on top of the Space Launch System (SLS) rocket at NASA’s Kennedy Space Center in Florida. 11)
- Artemis I is the first in a series of increasingly complex missions for human deep space exploration. The European Service Module will power Orion's crew module around the Moon and back with over 30 engines. The European Service Module provides electricity, water, oxygen and nitrogen as well as keeping the spacecraft at the right temperature and on course.

• In a call with reporters Oct. 22, 2021, agency officials said they had completed the installation of the Orion spacecraft on top of the Space Launch System’s upper stage, wrapping up the assembly of the vehicle for the Artemis 1 launch. The spacecraft had been moved over the Vehicle Assembly Building (VAB) at the Kennedy Space Center Oct. 19. 12)
- “Completing stacking is a really important milestone. It shows that we’re in the home stretch towards the mission,” said Mike Sarafin, Artemis 1 mission manager at NASA Headquarters.
- The completed vehicle will undergo tests inside the VAB before being rolled out to Launch Complex 39B late this year, said Tom Whitmeyer, NASA deputy associate administrator for exploration systems development. A wet dress rehearsal, where the SLS core stage is fueled and goes through a practice countdown that stops just short of ignition of its four RS-25 engines, is expected in early January. The vehicle will then go back to the VAB for final preparations before going back to the pad for launch.
- “We’re looking at a period of time within February” for the launch, he said. “We’re very excited. We think this is really tremendous progress.”
- Sarafin said the launch period for Artemis 1 runs from Feb. 12 to 27. A launch on Feb. 12, the first possible opportunity, would take place at 5:56 p.m. EST at the start of a 21-minute window. Additional launch opportunities run from March 12 to 27 and from April 8 to 23.
- The launch windows are governed by the performance of the SLS. “It really has to do with the three-body system that we’re dealing with” involving the vehicle, Earth and moon, including constraints on a daylight splashdown of Orion. “With the Interim Cryogenic Propulsion Stage, we, at certain points in that lunar cycle, are performance constrained.”
- Originally, NASA projected just a one-week launch period per month. However, he said mission planners found a way to double the length of the period by changing parameters of the mission. If the launch takes place in the first half of the period, the mission will last six weeks, versus four weeks for launches in the second half. The difference, he said, is taking an extra lap in Orion’s distant retrograde orbit around the moon, which sets up the desired landing conditions.
- The briefing was the first formal confirmation by NASA that Artemis 1 will not launch this year. NASA had been holding on to a launch late this year in public statements, although in recent weeks agency leaders had acknowledged that a slip to early next year was increasingly likely.
- While Feb. 12 is the earliest possible launch date for Artemis 1, officials stopped short to committing to that day. Whitmeyer said NASA will wait until after the wet dress rehearsal before setting a formal launch date. “We really want to see the results of that test, see how we’re doing, see if there’s anything we need to do before we get ready to launch,” he said.
- Once on the pad, there will be other limitations on the launch. “We are limited by the amount of liquid hydrogen that we have,” said Sarafin, which dictates the amount of time the vehicle can stay fueled on the pad on any given launch attempt as well as the timing between launch attempts.
- Mike Bolger, Exploration Ground Systems program manager at KSC (Kennedy Space Center), said if the first launch attempt is scrubbed, there would be a 48-hour turnaround before the second attempt. A third launch attempt would come 72 hours after that.

• March 8, 2018: Exploration Mission-1 (EM-1) will be the first integrated test of NASA’s deep space exploration systems: the Orion spacecraft, Space Launch System (SLS) rocket and the ground systems at Kennedy Space Center in Cape Canaveral, Florida. The first in a series of increasingly complex missions, EM-1 will be an uncrewed flight test that will provide a foundation for human deep space exploration, and demonstrate our commitment and capability to extend human existence to the Moon and beyond. 13)
- During this flight, the spacecraft will launch on the most powerful rocket in the world and fly farther than any spacecraft built for humans has ever flown. It will travel 280,000 miles from Earth, thousands of miles beyond the Moon over the course of about a three-week mission. Orion will stay in space longer than any ship for astronauts has done without docking to a space station and return home faster and hotter than ever before.
- “This is a mission that truly will do what hasn’t been done and learn what isn’t known,” said Mike Sarafin, EM-1 mission manager at NASA Headquarters in Washington. “It will blaze a trail that people will follow on the next Orion flight, pushing the edges of the envelope to prepare for that mission.”
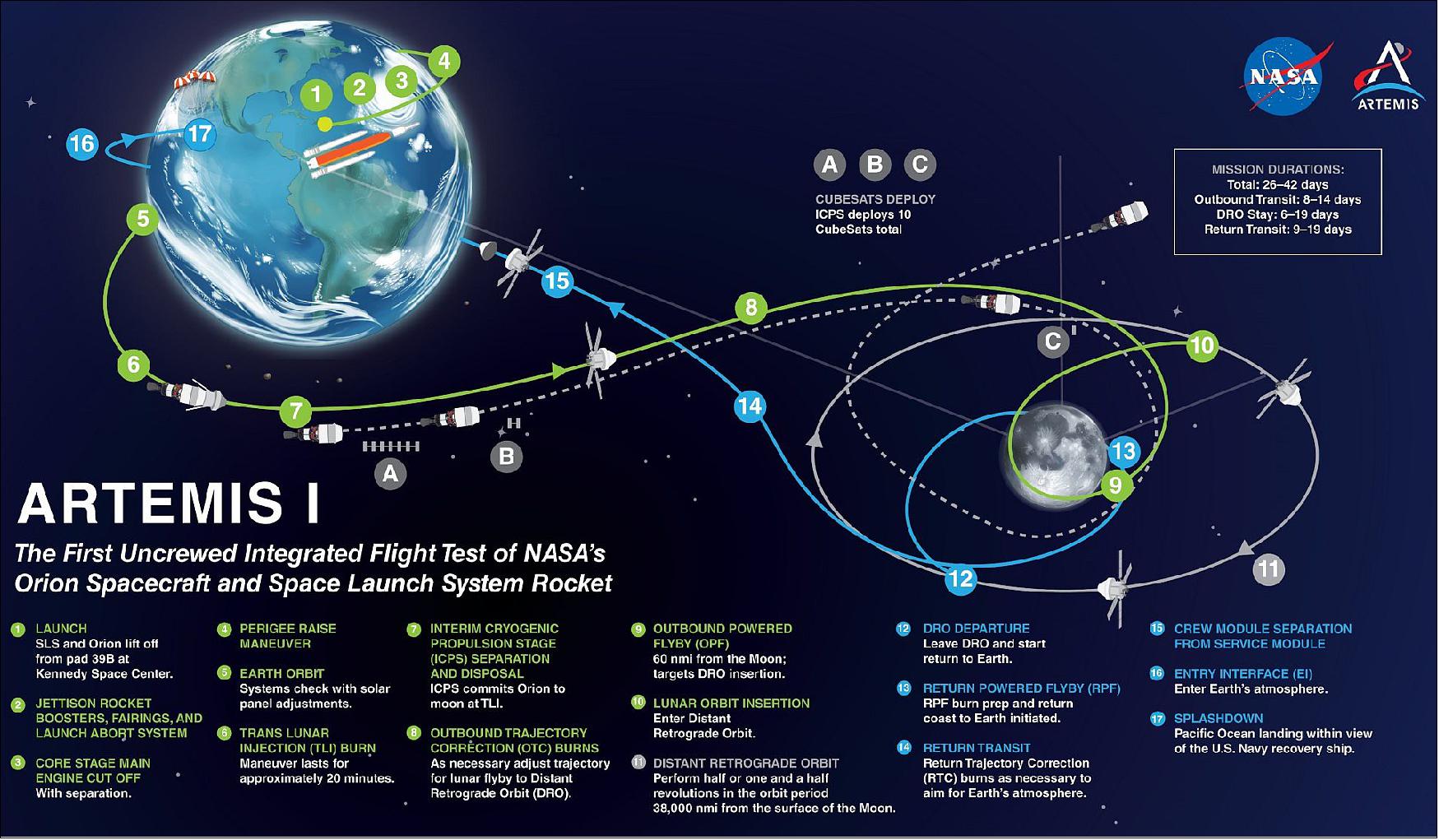
- Leaving Earth: SLS and Orion will blast off from Launch Complex 39B at NASA’s modernized spaceport at Kennedy Space Center in Florida. The SLS rocket is designed for missions beyond low-Earth orbit carrying crew or cargo to the Moon and beyond, and will produce 8.8 million pounds of thrust during liftoff and ascent to loft a vehicle weighing nearly six million pounds to orbit. Propelled by a pair of five segment boosters and four RS-25 engines, the rocket will reach the period of greatest atmospheric force within ninety seconds. After jettisoning the boosters, service module panels, and launch abort system, the core stage engines will shut down and the core stage will separate from the spacecraft.
- As the spacecraft makes an orbit of Earth, it will deploy its solar arrays and the ICPS (Interim Cryogenic Propulsion Stage) will give Orion the big push needed to leave Earth’s orbit and travel toward the Moon. From there, Orion will separate from the ICPS within about two hours after launch. The ICPS will then deploy a number of small satellites, known as CubeSats, to perform several experiments and technology demonstrations.
- On to the Moon: As Orion continues on its path from Earth orbit to the Moon, it will be propelled by a service module provided by the European Space Agency, which will supply the spacecraft’s main propulsion system and power (as well as house air and water for astronauts on future missions). Orion will pass through the Van Allen radiation belts, fly past the Global Positioning System (GPS) satellite constellation and above communication satellites in Earth orbit. To talk with mission control in Houston, Orion will switch from NASA’s Tracking and Data Relay Satellites system and communicate through the Deep Space Network. From here, Orion will continue to demonstrate its unique design to navigate, communicate, and operate in a deep space environment.
- The outbound trip to the Moon will take several days, during which time engineers will evaluate the spacecraft’s systems and, as needed, correct its trajectory. Orion will fly about 62 miles (100 km) above the surface of the Moon, and then use the Moon’s gravitational force to propel Orion into a new deep retrograde, or opposite, orbit about 70,000 km from the Moon.
- The spacecraft will stay in that orbit for approximately six days to collect data and allow mission controllers to assess the performance of the spacecraft. During this period, Orion will travel in a direction around the Moon retrograde from the direction the Moon travels around Earth.
- Return and Reentry: For its return trip to Earth, Orion will do another close flyby that takes the spacecraft within about 60 miles of the Moon’s surface, the spacecraft will use another precisely timed engine firing of the European-provided service module in conjunction with the Moon’s gravity to accelerate back toward Earth. This maneuver will set the spacecraft on its trajectory back toward Earth to enter our planet’s atmosphere traveling at 25,000 mph (11 kilometers per second), producing temperatures of approximately 5,000 degrees Fahrenheit (2,760 degrees Celsius) – faster and hotter than Orion experienced during its 2014 flight test.
- After about three weeks and a total distance traveled exceeding 1.3 million miles, the mission will end with a test of Orion’s capability to return safely to the Earth as the spacecraft makes a precision landing within eyesight of the recovery ship off the coast of Baja, California. Following splashdown, Orion will remain powered for a period of time as divers from the U.S. Navy and operations teams from NASA’s Exploration Ground Systems approach in small boats from the waiting recovery ship. The divers will briefly inspect the spacecraft for hazards and hook up tending and tow lines, and then engineers will tow the capsule into the well-deck of the recovery ship to bring the spacecraft home.
- Future Missions: With this first exploration mission, NASA is leading the next steps of human exploration into deep space where astronauts will build and begin testing the systems near the Moon needed for lunar surface missions and exploration to other destinations farther from Earth, including Mars. The SLS rocket will evolve from an initial configuration capable of sending more than 26 metric tons to the Moon, to a final configuration that can send at least 45 metric tons. The second flight will take crew on a different trajectory using a powerful exploration upper stage and test Orion’s critical systems with humans aboard. Together, Orion, SLS and the ground systems at Kennedy will be able to meet the most challenging crew and cargo mission needs in deep space.
- Future exploration missions with crew aboard Orion will dock with a Lunar Orbital Platform-Gateway. NASA and its partners will use the gateway for deep-space operations including missions to and on the Moon with decreasing reliance on the Earth. Using lunar orbit, we will gain the experience necessary to extend human exploration farther into the solar system than ever before.
The Orion Vehicle
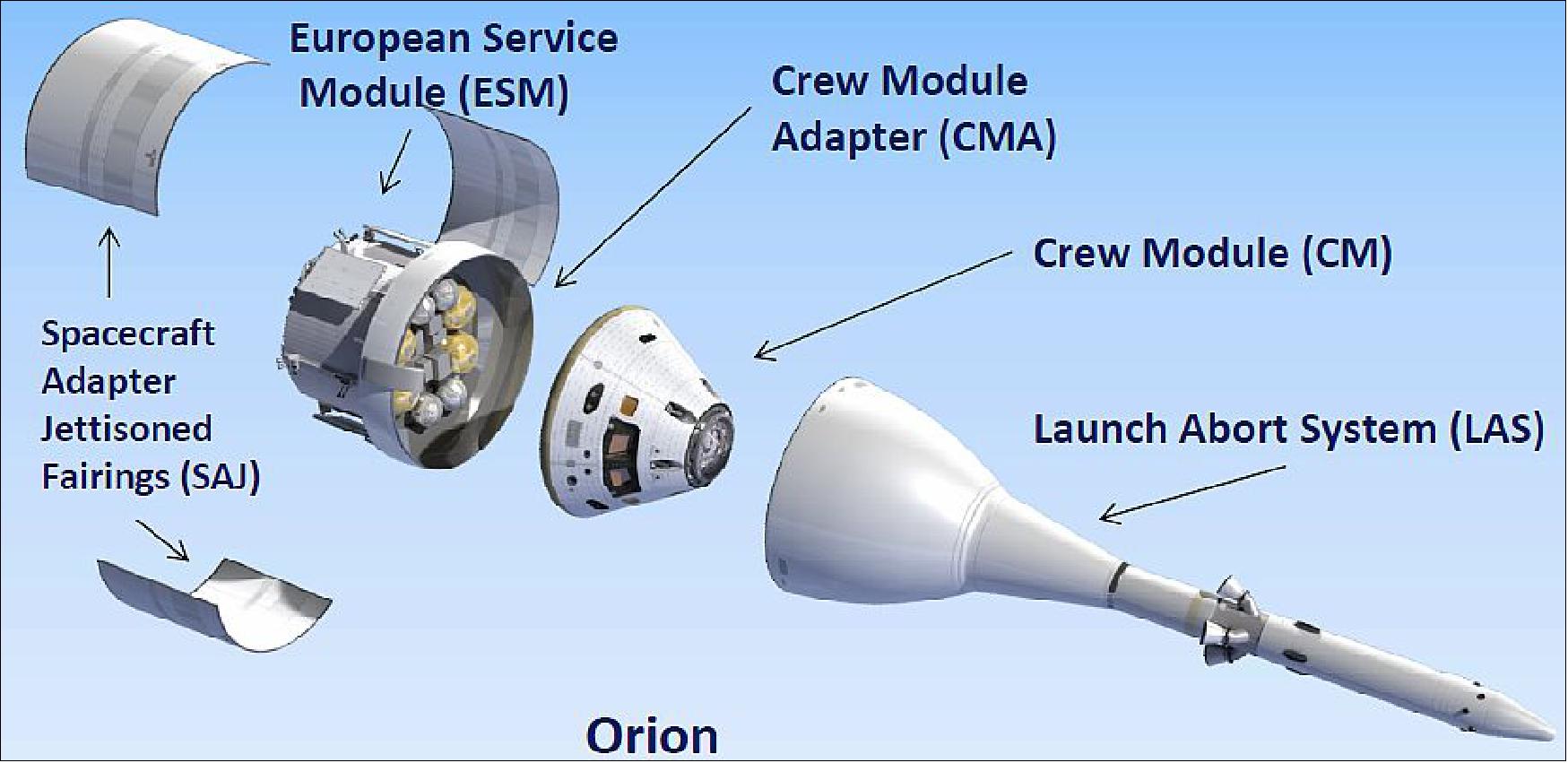
The Orion architecture configuration consists of the following modules: (Figures 8 and 9, Ref. 2)
• CM (Crew Module)
• ESM (European Service Module)
• CMA (Crew Module Adapter)
• SA (Spacecraft Adapter)
• SAJ (Spacecraft Adapter Jettisoned Fairings)
• LAS (Launch Abort System)
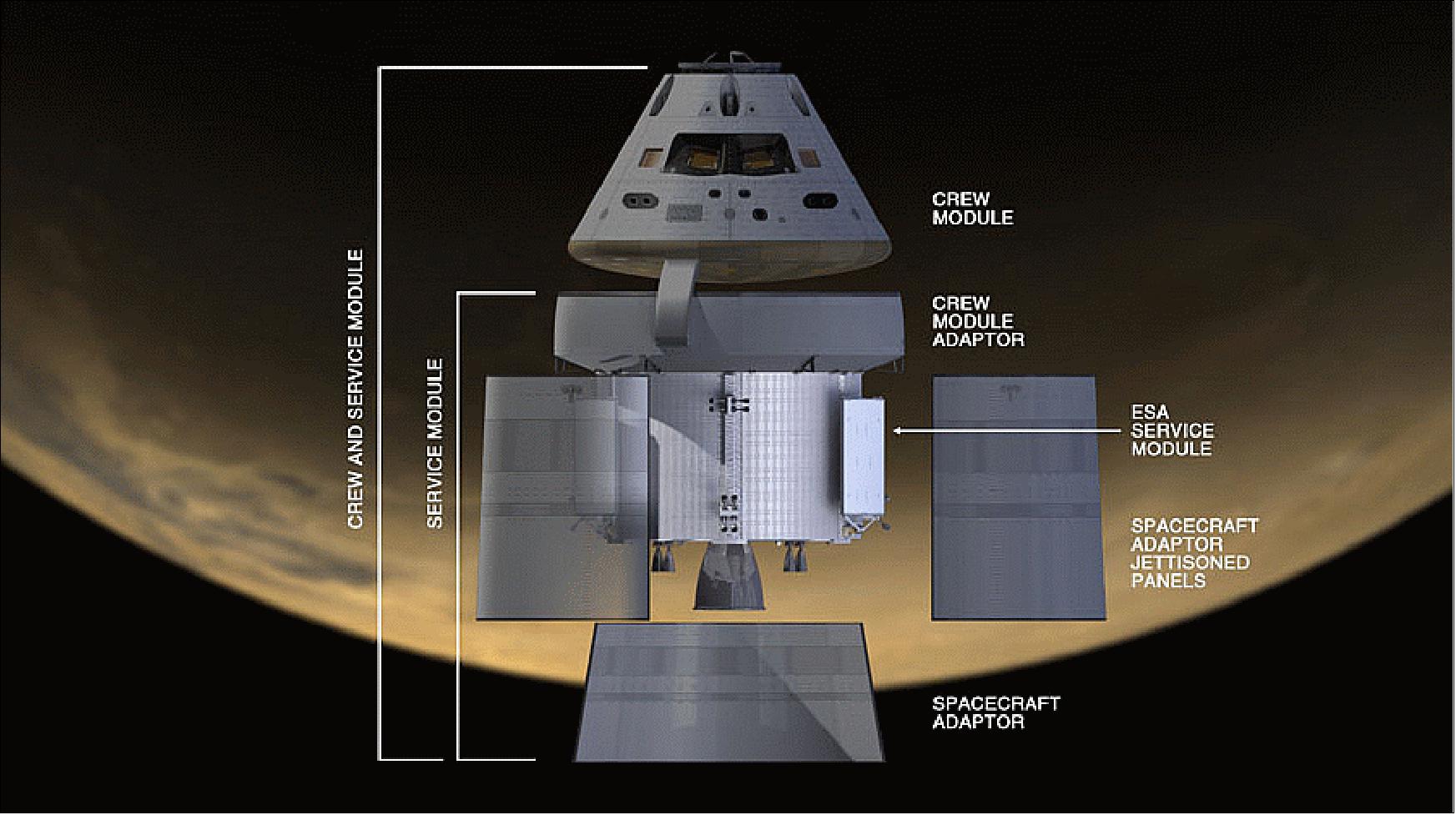
The Service Module (SM) refers to the combined CMA + ESM + SA + SAJ.
The Crew Module and ESM (European Service Module), also referred to as SM, are physically interfacing via an interface ring called the CMA (Crew Module Adapter). The ESM is attached to the CMA for the duration of the mission. Just prior to the Earth’s orbit entry, the CMA separates from the CM for CMA/ESM disposal and the CM performs final reentry and landing operations.
NASA is responsible for development of the CM, CMA, SA, SAJ, and LAS elements of the Orion spacecraft. The CMA provides the structural, mechanical, electrical, and fluid interface between the CM and ESM. In addition, the CMA houses communication equipment, sublimators for thermal heat rejection, and power and data control/interface electronics. The SM is enclosed by three spacecraft adapter fairing panels (SAJ) which provide a partial load path from the CMA to SA but also protect the solar arrays, radiators, and thrusters from launch and ascent loads. The fairings will be jettisoned during the ascent phase or following main engine cut-off of the launch vehicle.
The SA (Spacecraft Adapter) provides the interface to the launch vehicle during launch. During launch and ascent, the ESM and SA will be enclosed by the SAJ. The SA attaches to the aft end of the ESM to the Launch Vehicle and includes the structural interface, separation mechanisms, and umbilical connectors for communication between the launch vehicle and the Orion Spacecraft. At launch vehicle burnout, the Orion Spacecraft separates from the SA at the ESM/SA separation plane.
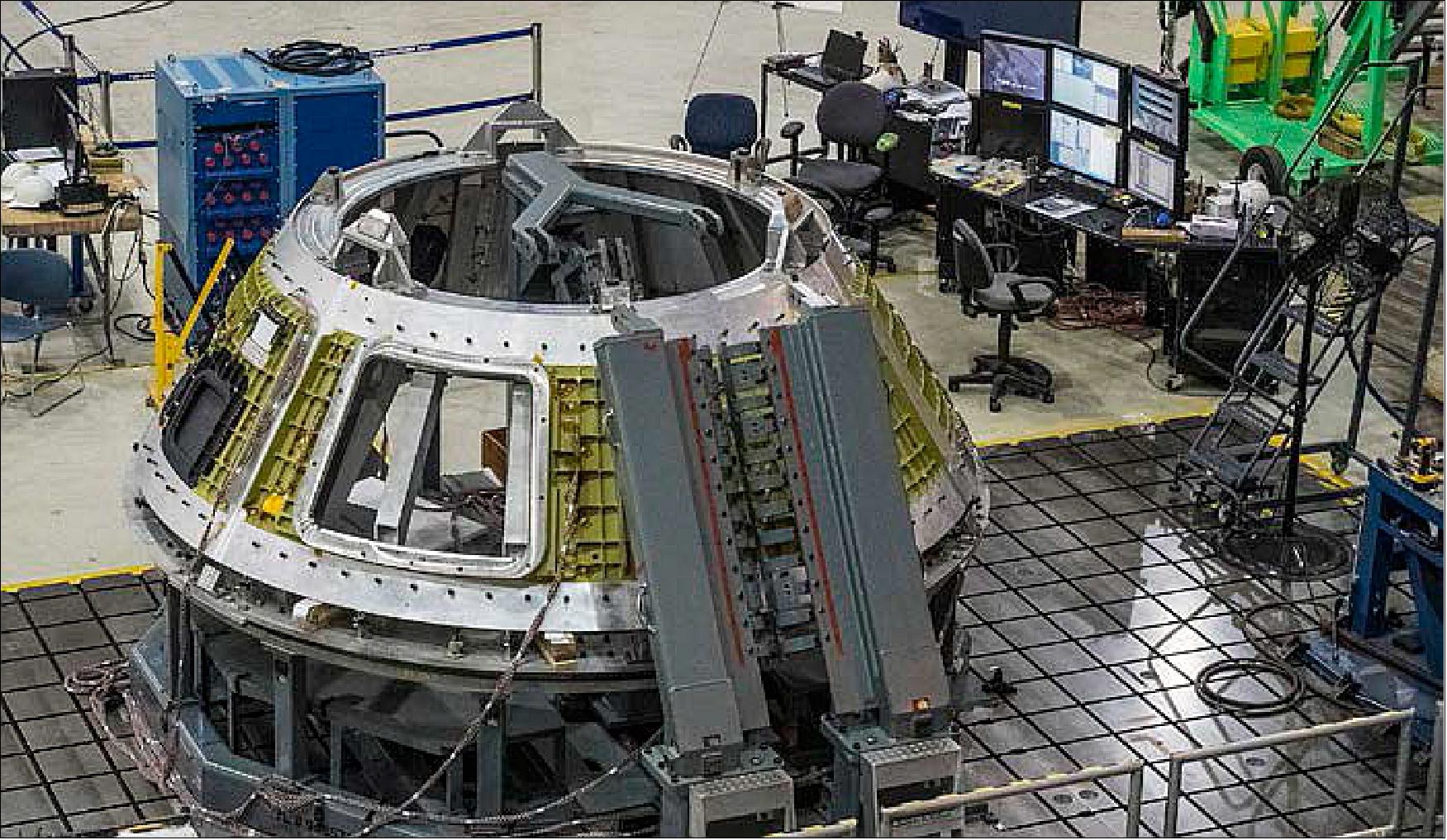
Crew Module
The milestones for the Orion EM-1 mirror the path taken by the Orion EFT-1 (Exploration Flight Test-1) spacecraft. However, the Orion EM-1 will sport a number of improvements based on the experiences of the December 2014 test flight. NASA is beefing up the critical TPS (Thermal Protection System) that will protect astronauts from the searing heats experienced during reentry as the human rated vehicle plunges through the Earth’s atmosphere after returning from ambitious expeditions to the Moon and beyond.
Based in part on lessons learned from EFT-1, engineers are refining Orion’s heat shield to enhance the design, ease manufacturing procedures and significantly strengthen is heat resistant capabilities for the far more challenging space environments and missions that lie ahead later this decade and planned further out in the future as part of NASA’s agency-wide ‘Journey to Mars’ initiative to send humans to the Red Planet in the 2030s.
On all future flights starting with EM-1 (Exploration Mission-1), the Orion crew module must withstand the higher temperatures and speeds experienced during return from more distant destinations such as the Moon, near-Earth Asteroids and Mars. Orion's TPS is comprised of the 5 m diameter main heat shield covering the rounded base of the capsule as well as the grid of back shell tiles bonded around the vehicle from top to bottom. 15)
Starting with EM-1, engineers will bond Orion’s thermal protection system back shell tiles with a silver, metallic-based thermal control coating. The coating is designed to keep Orion’s back shell in a temperature range from approximately -65 to 290ºC prior to entry and afford protection against electrical surface charges in space and during reentry.
The pressure vessel is the primary structure of Orion’s crew module and is made of seven large aluminum pieces that must be welded together in detailed fashion. The first weld connected the tunnel to the forward bulkhead, which is at the top of the spacecraft and houses many of Orion’s critical systems, such as the parachutes that deploy during reentry. Orion’s tunnel, with a docking hatch, will allow crews to move between the crew module and other spacecraft. 16)
Orion’s pressure vessel is composed of seven large pieces of aluminum, three of which are the cone panels. The pressure vessel holds the atmosphere astronauts will breathe against the vacuum of deep space, forming the crew compartment. The three panels together form the angled mid-section around the crew module where the windows and hatch are located. While technicians have been joining other elements of the structure together since early September, the cone panels have presented a unique challenge for NASA and Lockheed Martin, the agency’s prime contractor for Orion. Engineers who have sought to reduce the crew module’s overall weight have encountered and overcome technical challenges. 17)
The lessons learned from the EFT-1 mission are being applied to the EM-1 (Exploration Mission-1) and EM-2 flight test configurations to optimize a system design that can smoothly transition into production.
Ten of the most important lessons from EFT-1 focused on the ability to evaluate the design with actual flight performance. This was critical for the remaining design process as NASA continues to develop the most advanced Human rated spacecraft ever built. The following are the top ten lessons learned from this test flight: 18)
1) Some deep space designs are classic for a reason: Every aspect of Orion’s design is driven by crew safety. Over 50 years of NASA’s investment learning the ins and outs of human spaceflight has provided direction for meeting deep space requirements. An example is LAS (Launch Abort System). About 6 minutes into launch, the LAS is jettisoned to save mass for the journey to deep space destinations. While other system configurations exist, design trade studies repeatedly highlighted the advantage of not carrying extra weight past the time it is needed. So because the Orion LAS supports missions to deep space, mass is king and any extra weight is an extreme hindrance to those missions. By shedding the Orion LAS early, this mass isn’t a burden to the vehicle for the entire mission, and other Orion systems are able to provide the abort function for the remainder of ascent to orbit.
2) Crew safety is built in, not bolted on: The EFT-1 tested and verified systems that are built “into the bones” of the spacecraft from the very beginning. This means not just the heat shield or the flight computers are designed for the rigors of deep space, but everything included in the fundamental systems and structure of the spacecraft are designed and built to specifications set forth by NASA. Every system design has a deep space requirement it is being built to right now: Orion’s seats are being designed to help prevent loss of consciousness as astronauts experience up to 5 G’s during high-velocity re-entries, the cooling system keeps the crew cabin about 25ºC despite its heat shield being heated to 2,200ºC during reentry, the built in stowage lockers are designed to double as a safe-haven during dangerous solar activity, the life support system allows for exercise since deep space missions require much longer stays in zero gravity, computers and avionics are designed to self-correct in case there is a failure and you’re months from home, and the crew module tiles are designed to protect from multiple micro-meteoroid strikes since the number of strikes will increase during missions that last months instead of days.
3) Reusability must be tied to reality: Part of flying for the first time in space is being able to make informed decisions about what we can realistically reuse following a deep space mission. After evaluating areas of water intrusion and corrosion, we’ve come to expect that many components in the crew module, especially inside the pressurized volume, or the hull where the crew sits, can be reused for later flights—components such as the computers, avionics and electrical distribution for example. The structure itself is more difficult to predict for reuse base on the unpredictable landing loads it might experience from a long journey from deep space with unpredictable landing sea conditions. The program is looking at options for reuse based on actual landing load data provided.
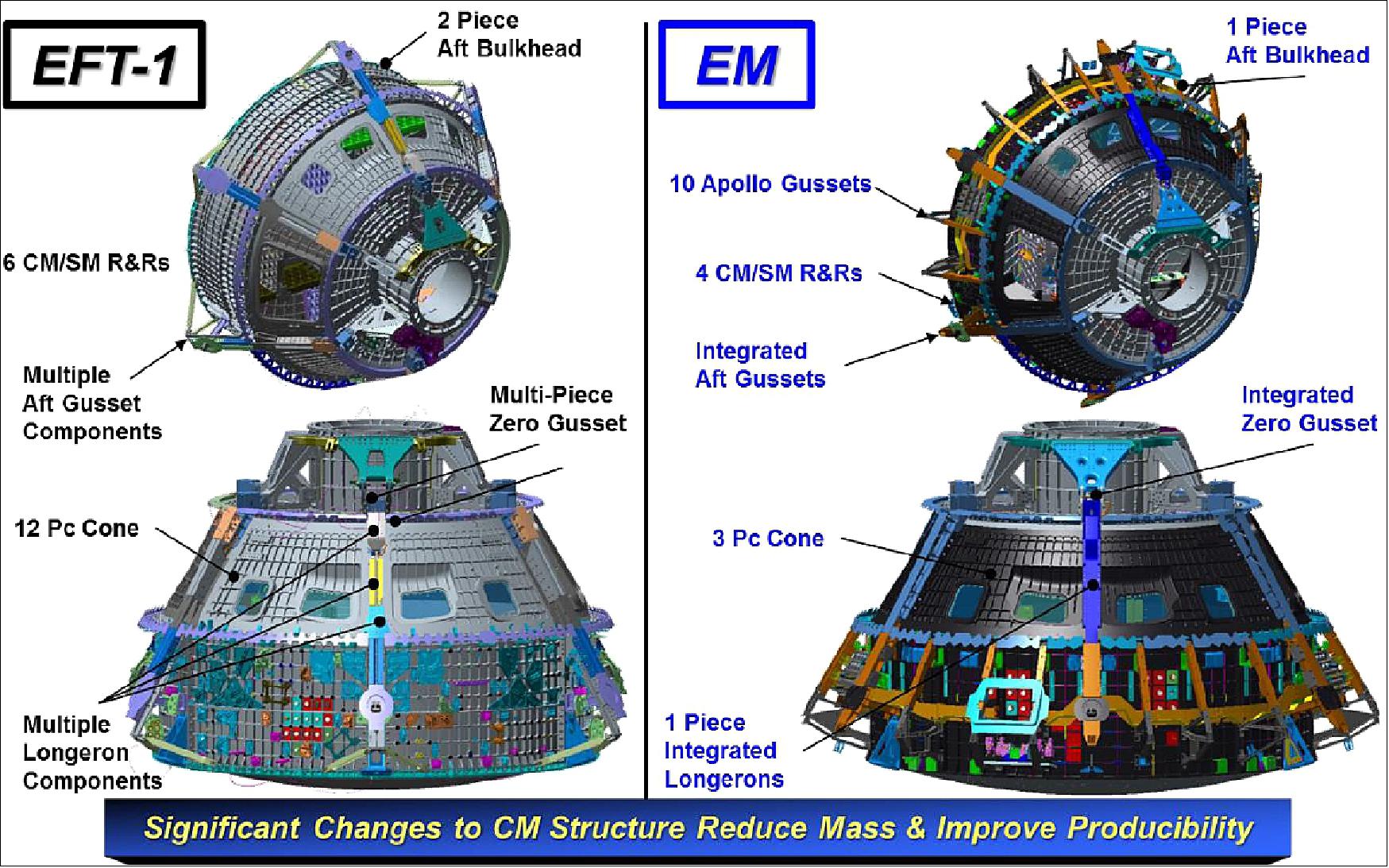
4) Designs mature as we learn: Significant design changes are being made to optimize the EM vehicles. Thefuture design and analysis efforts will be simplified (Figure 10), overall mass has gone down, and recurring costs for production will be lowered. Establishing a common design philosophy has prevented a large number of engineering revisions and hardware changes. The Orion design is now incorporating lessons from EFT-1 and updated requirements for the crewed EM-2 mission.
5) Test like you fly to ensure success: After extensive testing on the ground in “Flight Like” scenarios EFT-1 successfully tested Orion in real flight environments, which could not be duplicated in ground simulations. The systems were subjected to the most critical crew safety requirement with the same rigors they will see when carrying humans. Systems verified included: thermal protection system, hardware separation events and the parachute system. This was a 100% mission success. 87 EFT-1 flight test objectives were identified in the early phases of the test development program. These objectives included verification of Orion’s subsystems ability to launch, control its trajectory with OFI (Operational Flight Instrumentation), complete all separation events, reenter the Earth’s atmosphere at 32, 200 km/hr and 2200ºC, land accurately in the Pacific Ocean and be recovered without damage. 81 of the 87 FTOs (Flight Test Objectives) were fully satisfied with six being partially met. Four of the seven FTO's were related to suspect DFI (Developmental Flight Instrumentation) performance. Two FTO’s related to the Crew Module Up-righting System were partially met, and one FTO related to structural measurements was partially met.
6) Organize for focus: Organizationally, Lockheed Martin and NASA agreed assigning a “mission director” to each test flight would allow program focus on the near term test milestones while maintaining a parallel program focus on the remaining DDT&E (Design, Development, Test, and Evaluation) efforts. EFT-1 was the first mission where this was implemented and proved to ensure the test was completed on time and within budget. This effort also saved over one year of development time for EM-1 by performing this in parallel versus chronologically.
7) Processes and reviews tailored: Since its inception the Orion program has spent significant time focusing on defining an efficient set of requirements to enable the design of Orion as well as optimize the concept of operations for a recurring program rhythm. In an effort to remain flexible the program continues to evolve the requirements based on lessons learned. On EFT-1 the program used a consolidated requirements document approach that was successful in limiting the number of requirements, individual requirements documents, and tiers of requirements documents. The team is using the success of this approach to streamline the EM requirements where possible. Requirements verifications were completed later than planned, partly because the verification work did not carry the same urgency as other launch campaign tasks. The team is looking at a more structured “waterfall” approach to prevent lower level verifications from conflicting with launch campaign activities.
8) Flexibility to accommodate change: Several program planning improvements were accomplished during the course of the program leading up to EFT-1. Improving the Orion IMS ( Integrated Master Schedule) by integrating the NASA “non-Prime” elements improved the continuity of the entire schedule past vehicle delivery. Through Monthly Orion Program Performance Review meetings, the assessments team continued to monitor the contractor performance. Data input for these reviews consisted of Integrated Master Schedule updates, CPRs (Cost Performance Reports), Financial Management Reports (533 inputs), contractor supplemental financial and schedule data, and through participation in the subsystem IPT (Integrated Product Team) meetings. The assessments team integrated these data each month to update the assessment and forecast for the EFT-1 launch date and financial position enabling program management to make rapid decisions.
9) Partnerships ensure Communication: After the President’s proposed cancellation of the Constellation program, NASA and Lockheed Martin recognized reductions needed to occur both on the government side and within Industry to keep the program intact. NASA identified all work within their scope as “Non-Prime” and all work within Industry as “Prime”. NASA and Industry were challenged with a $738.9 M reduction in funding in 2010 and needed to re-plan the entire program in anticipation of this reduction. The cost reduction initiatives they initiated have come to be known as “The streamlining of Orion” and have been used as examples of how NASA and Industry can work together to become more efficient and affordable. The continued emphasis on meeting program objectives within the government’s affordability range have resulted in a refined program plan that accomplishes all of its goals within the annual budget and without jeopardizing mission success. One example of this was the reduction of test flights from seven to four while maintaining the same requirements verifications.
10) Supply Chain must remain healthy: EFT-1 provided the Orion team the ability to exercise 80% of the supply chain that will be utilized for future production vehicles. This includes subcontractors currently spread across 42 states with 60,000 parts being received by NASA or its prime subcontractor in 3 major integration facilities. Throughout this endeavor the processes were validated, enhancements were made and opportunities for improvement identified. EFT-1 helped establish 6 key principles needed to ensure effective supply chain management:
• Centralized supply chain ownership/management offers advantages over IPT ownership
• Need for timely actionable information, including stable engineering design documentation, is mandatory
• Consistent, effective and constant communication is mandatory
• Management of the supplier certification and work load
• Manage with the tools, don’t expect the tools to manage
• Work within the system.
In summary, NASA and Lockheed Martin are taking what we have learned from EFT-1 and years of government investments to make improvements, fly again, making improvements again, and developing a spacecraft that we can proudly stand behind and say we are confident in its abilities to take humans into deep space and bring them safely home.
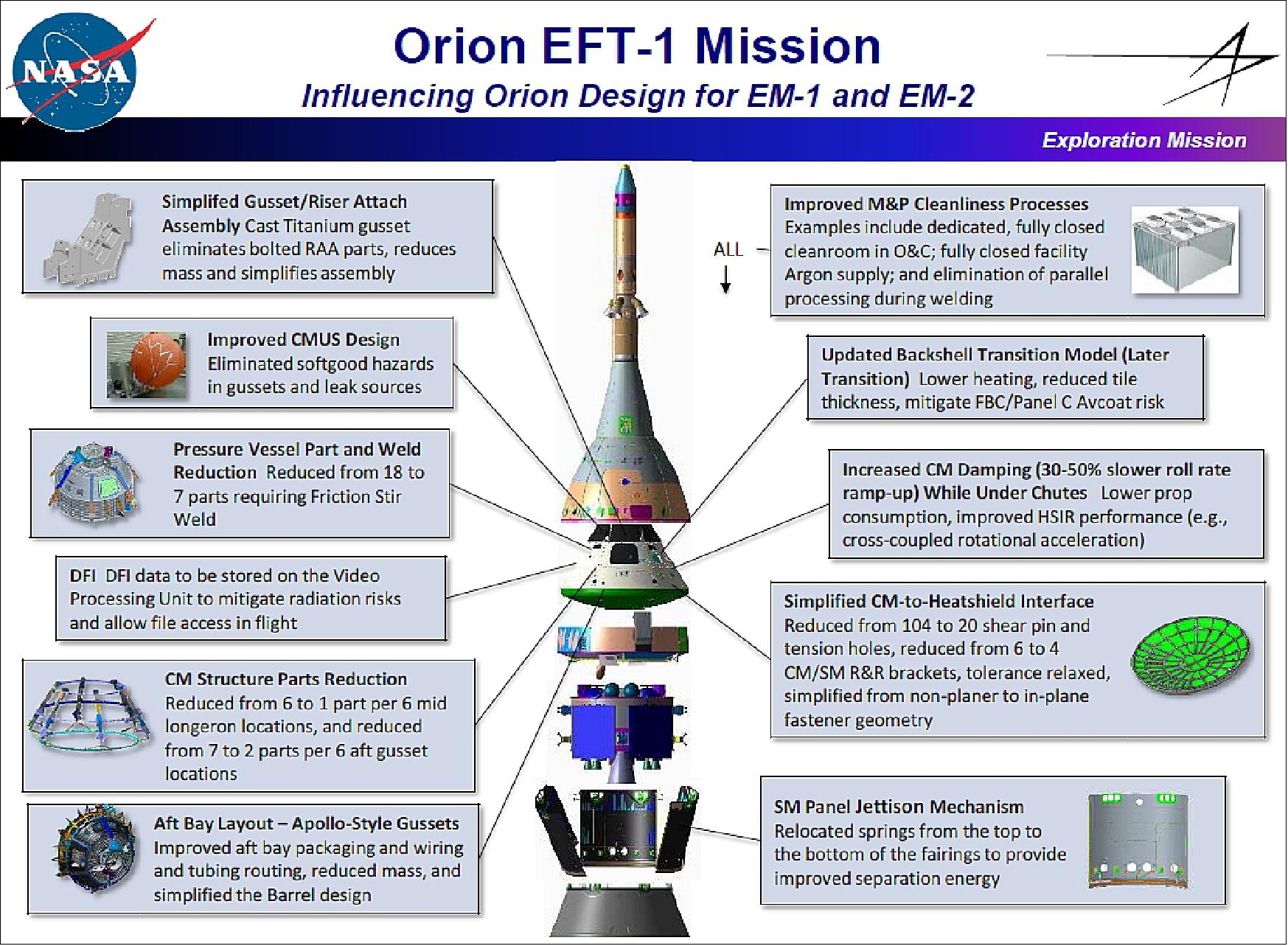
Design Changes
The Orion design for future Exploration Missions experienced many design optimizations as a result of the EFT-1 flight results. The following section highlights several changes to exemplify optimizations that was realized. Note: (For more information, the reader is referred to Ref. 18).
Structures: Reduced parts and weld assemblies required on the pressure vessel include:
- Reduction from 6 to 3 cone panels, and reduction of cone section welds from 12 to 3.
- Reduction from a 3 piece welded aft bulkhead design to a single spun-formed design.
- Change to an “Apollo-gusset” design in the aft-bay to help reduce the number of separable-parts, and combine structural elements (reduced thruster pod support structures and harness support structures, etc.).
Propulsion: Tubing subassemblies on EFT-1 were custom fit for propulsion system integration (e.g. fit-up tube assembly, cut, face, install heaters / temp sensors, reinstall, repeat as required). On EM-1 no trim to fit will be required on the vehicle. Tubing subassemblies will be delivered in their net shape and subassembly welds will be proof & leak tested prior to delivery.
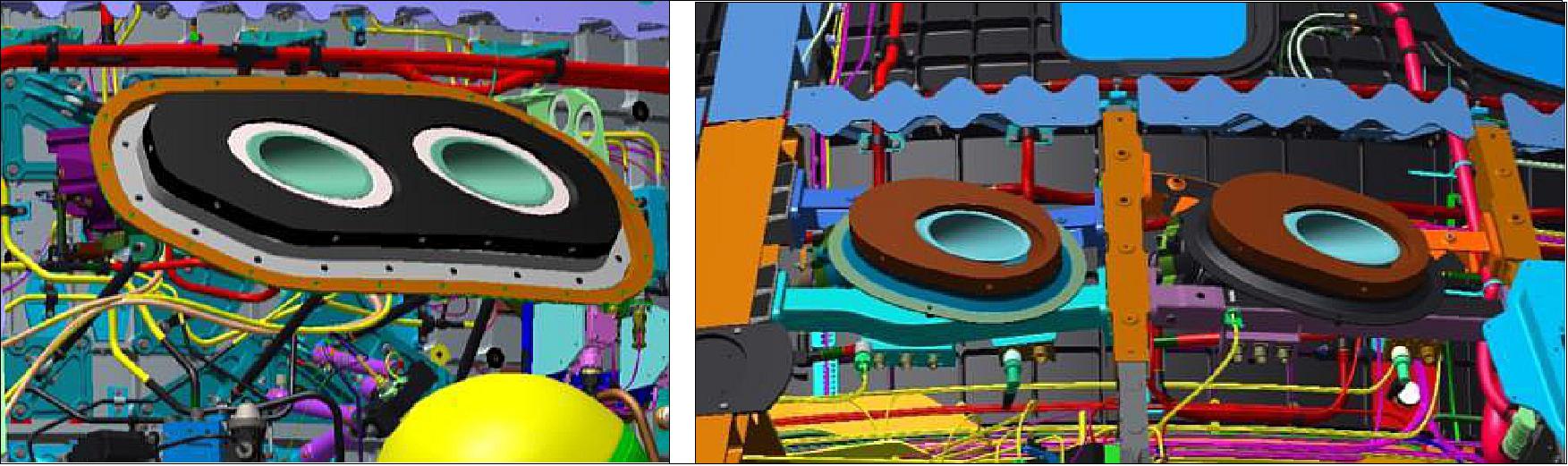
PCAs (Pressure Control Assemblies) on EFT-1 required a custom fit for propulsion system integration (similar to Tubing subassemblies). On EM-1 there will be improved packaging and attachment methods including PCA welds proof & leak checked prior to delivery.
Propellant and Pressurant Tanks on EFT-1 were difficult to integrate and perform welding operations. The EM-1 design created a new inlet / outlet orientation to ease integration and welding operations.
RCS (Reaction Control System) thrusters on EFT-1 had support struts that have been simplified to a Pod design and attachment method eliminating all struts.
TPS (Thermal Protection Systems): The Heatshield Avcoat design improvement included changing from a monolithic, individual cell injection process to a “Block Avcoat” design where the heat shield blocks could be automated in production while increasing material properties performance. The use of thermal tape that was used on the EFT-1 heatshield (and similar to Apollo) was changed to use on all backshell and heatshield surfaces for all future Exploration Missions.
Micrometeoroid and Orbital Debris Performance: There are a number of lessons learned in the realm of MMOD (Micrometeoroid and Orbital Debris) environments and analyses, which are being examined and used to influence change for the EM and beyond missions. Chief among these lessons learned is that time spent in the high orbital debris flux altitude band, approximately 650 km to 1200 km, should be minimized. The MMOD analysis performed on EFT-1 was the first such analysis of a human-rated spacecraft above ISS ( International Space Station) altitudes since man-made orbital debris has become an issue, and found the risk at these altitudes (600 km – 1600 km) to be much higher than anticipated; Apollo was too early in spaceflight history for much OD (Orbital Debris) to have accumulated yet. Post-flight inspection of the EFT-1 capsule indicated that actual MMOD exposure may have been even higher than the analyses had assessed. Based on this lesson learned, the parking orbit of EM-1 has been reduced from 3.5 hours in a high-MMOD-risk orbit (2 orbits), to half that time (limited to 1 orbit) to reduce MMOD risk. And as EM-2 trajectory trades and analysis is ongoing, avoiding these altitudes has been accepted as a prerequisite in the EM-2 trajectories. Largely anchored on this finding, other lesson learned recommendations include: increasing MMOD protection in upper-stage and other critical hardware, re-assessing window damage cause and remediation, and continued post-flight inspections and MMOD environment recommended updates based on EM flights.
Radiation Summary: Orion is the first spacecraft that addresses crew radiation protection as an integral part of the vehicle design. We are using a state-of-the-art radiation analysis process to analyze the shielding provided by the vehicle and quantify the internal radiation environment. This analysis is based on the full fidelity Orion CAD model and space radiation environment models. Due to the EFT-1 trajectory passing through the very core of the van Allen proton belts, intravehicular radiation environment was equivalent to 4-6 weeks inside ISS (in terms of cumulative exposure). Thus EFT-1 presented a valuable opportunity to validate our analysis procedure and ultimately improve crew radiation protection for future manned missions. This opportunity was materialized by flying six RAMs (Radiation Area Monitors) on EFT-1. Radiation measurements were in very good agreement with pre-flight predictions, confirming the validity of the radiation analysis approach and providing confidence in our efforts to maintain crew radiation exposure ALARA (As Low as Reasonably Achievable) consistent with NASA requirements.
An important lesson learned for electronic components radiation hardening refers to the importance of considering time variability of the environments in the Single Event Effect rate calculations. The EFT-1 proton environment varied dramatically throughout the mission. Accounting for this time variation was an essential component in selecting the appropriate level of redundancy in critical systems such as the VMC/FCMs (Vehicle Management Computer / Flight Control Modules). This lesson continues to apply to Exploration Missions. Stochastically occurringSPEs ( Solar Particle Events) may cause significant temporary increase in the radiation environment, and critical systems need to design appropriately. A related lesson learned reflects the importance of assessing timing of critical mission events with respect to the radiation environment. Environment assessments performed for EFT-1 drove modification of the mission timeline such that Avionics intensive mission events be executed outside of the core of the van Allen belts. This too is a lesson learned relevant for future missions especially in off-nominal conditions that may expose the spacecraft to high radiation environments.
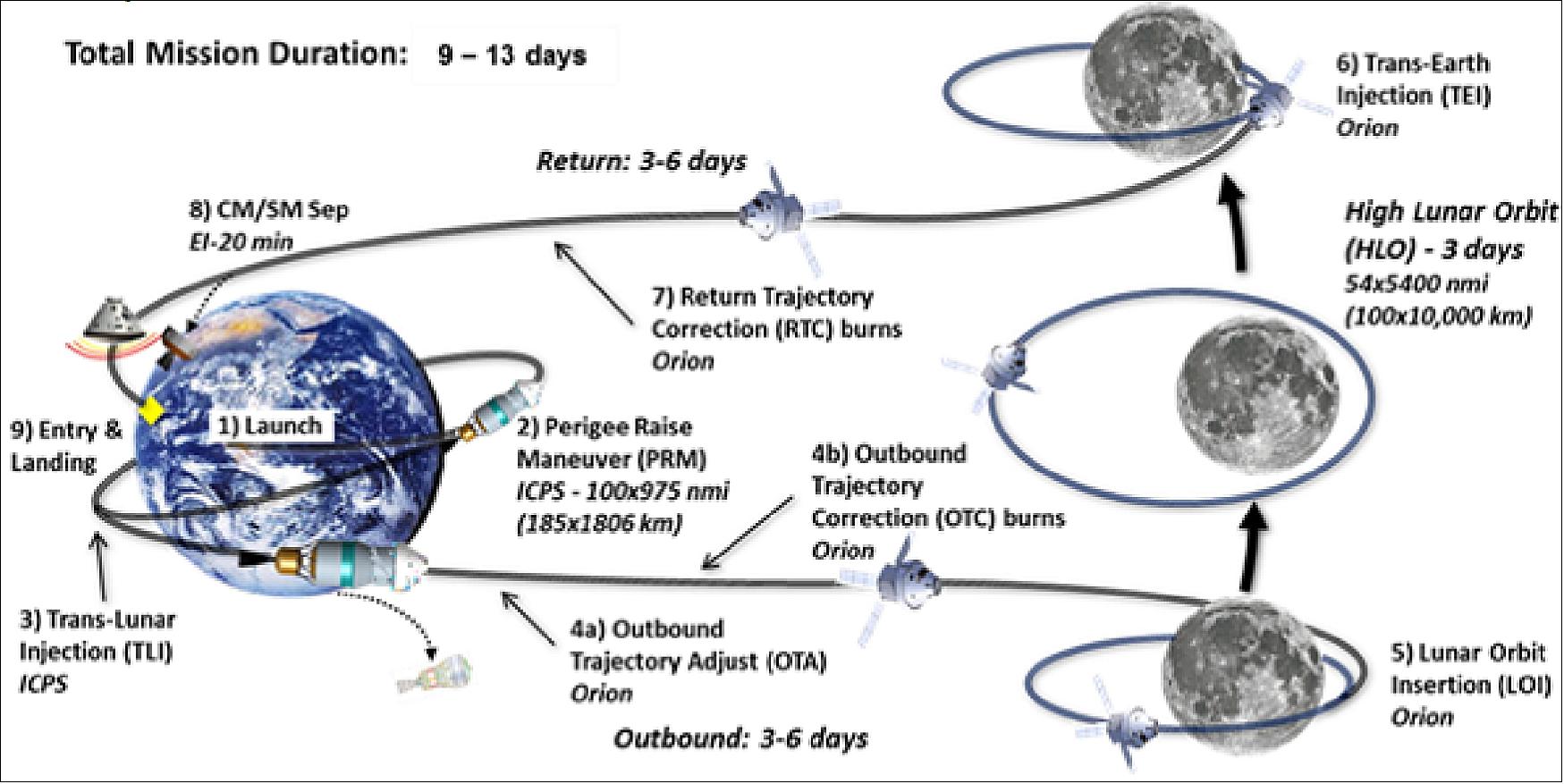
EM-2 (Exploration Mission-2): EM-2 will be a Crewed High Lunar Orbit test flight that will be launched on an SLS and enter lunar orbit in 2022 to verify the capability of Orion to successfully launch, perform a crewed mission, and return them safely to Earth. It is planned to spend several days in lunar orbit before performing a TEI (Trans-Earth Injection) burn to begin the return to Earth. The total mission duration is expected to be 14 days maximum (4 at destination). Figure 2 depicts one option for a lunar mission. The EM-2 configuration will consist of:
• A fully functional launch abort system
• A fully functional Crew Module that includes a crew of up to four and all Cis-Lunar life support systems
• A fully functional Service Module.
ESM (European Service Module)
The ESM implements four major system functions to Orion (Ref. 2):
• provides thrust for orbital maneuvers and attitude control after upper stage/launch vehicle separation
• generates electrical power and distributes it to the ESM users and to the CM/CMA
• regulates heat for the life support and avionics equipment during the orbital phases of the mission
• stores and provides to the CMA/CM potable water, oxygen, and nitrogen.
Mission | Purpose | Duration |
EM-1 - Lunar (DRO (Distant Retrograde Orbit) mission | - Qualification (uncrewed) | 25 days (6 at destination) |
EM-2 - Crewed High Lunar Orbit mission | - Qualification (crewed) | 14 days (4 at destination) |
Lunar Sortie mission | - Land crew of four on the surface of the Moon | 26 days (7 uncrewed in LLO) |
ISS Backup Crew Delivery mission | - Backup crew and cargo delivery to the ISS | 216 days (210 quiescent) |
In addition, it ensures structural spacecraft integrity during launch and in-orbit maneuvers. The ESM can also provide additional volume and other resources on select missions for accommodating science, engineering demonstrations, development test objectives, and deployment of lunar infrastructure equipment during the cruise and lunar orbit phases of lunar missions. This volume provides electrical power distribution, network access for command and control interfaces, and structures and mechanisms.
The architecture of the module has been developed based on the ATV spacecraft concept (five successful missions to the ISS),modified to cope with the different mission requirements and the man-rating approach for beyond LEO missions. 19)
The resulting ESM architecture is depicted in Figure 16, for comparison. The architecture of the system and subsystems hereafter proposed is the reference design for the Lunar Sortie Mission. Changes in the architecture are expected for the other missions to tailor the configuration to mission needs, to remove unnecessary HW and to optimize the launch mass.
European Industrial Consortium: ESA entrusted the development of the ESM (European Service Module) to a consortium of European industries led by Airbus Defence and Space. The consortium of companies was selected to reuse the experience and industrial heritage of the very successful ATV (Automated Transfer Vehicle). Airbus Defence DS Germany as the Prime Contractor is responsible for all system-related work. This includes: 20)
- The overall Management of the contract
- The overall System Engineering activities
- The Management of the procurement activities
- The System Product Assurance and Safety activities
- The liaison with Lockheed-Martin (NASA prime contractor of the Orion vehicle).
Airbus DS, France is responsible for part of the system engineering, ground software, Helium pressurant tanks and simulation facility.
On Subsystem level, Airbus DS, Germany is responsible for the System Engineering, the Propulsion, Power and Avionics Subsystem Engineering as well as for GSE and AIT activities. The responsibility for the development of the other sub-systems or equipment has been distributed among European companies as follows:
TAS (Thales Alenia Space) Italy: the Structure, Thermal and Consumable Storage Subsystems, supported by the following level-2 subcontractors:
- RUAG, Switzerland: secondary structures
- SONACA, Belgium: tank bulkhead
- APCO, Switzerland: MDPS (Meteoroid and Debris Protection System)
- CRISA, Spain, TCU (Thermal Control Unit)
- Prototech, Norway: nitrogen filters
- MEWASA, Switzerland, Water tank bellows.
Dutch Space, The Netherlands: the SAW (Solar Array Wings), supported by the following level-2 subcontractors:
- SELEX SE, Italy for the Photo Voltaic Assemblies
- RUAG, Switzerland: deployment dampers.
Airbus DS, Germany: the propellant tanks, Propulsion Drive Electronic and reaction control thrusters.
RUAG, Switzerland: the SADA (Solar Array Drive Assembly) composed of the mechanism and electronic unit.
SELEX SE, Italy: the PCDU (Power Conditioning and Distribution Unit)
Thales Alenia Space, Belgium: PRU (Pressure Regulation Unit)
Antwerp Space, Belgium: the Electrical Ground Support Equipment Front Ends, supported by the following level-2 subcontractors :
- Clemessy, France
- Rovsing, Denmark.
APCO, Switzerland: Mechanical Ground Support Equipment.
Latelec, France: avionics and power harness
TESAT Germany and Alter, Spain: CPP (Centralized Parts Procurement) scheme for EEE (Electrical, Electronic and Electromechanical)-parts.
Equipment suppliers encompasses Vacco (US), Moog (US), Sofrance (F), Cobham (US), Vivace (US).
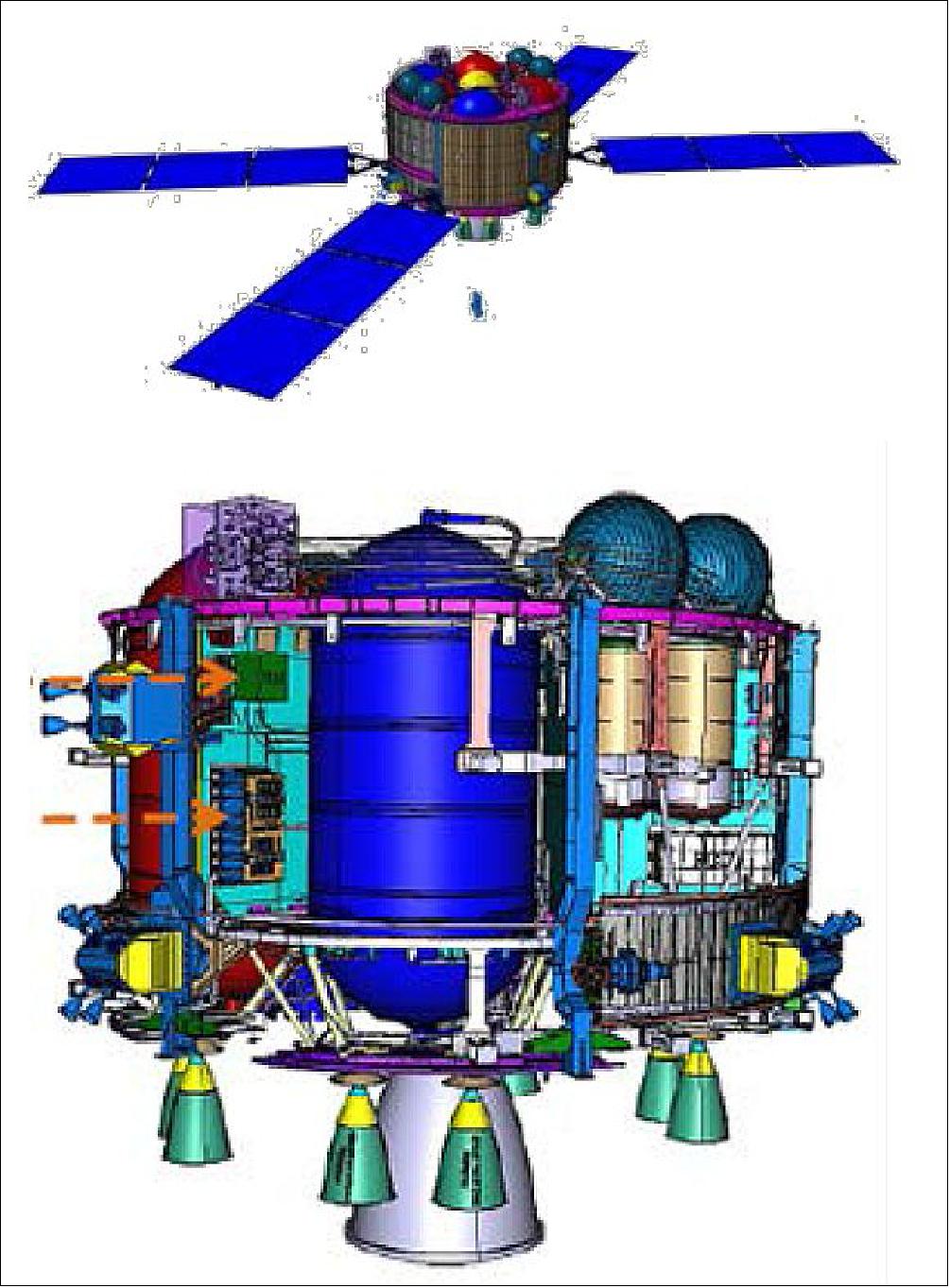
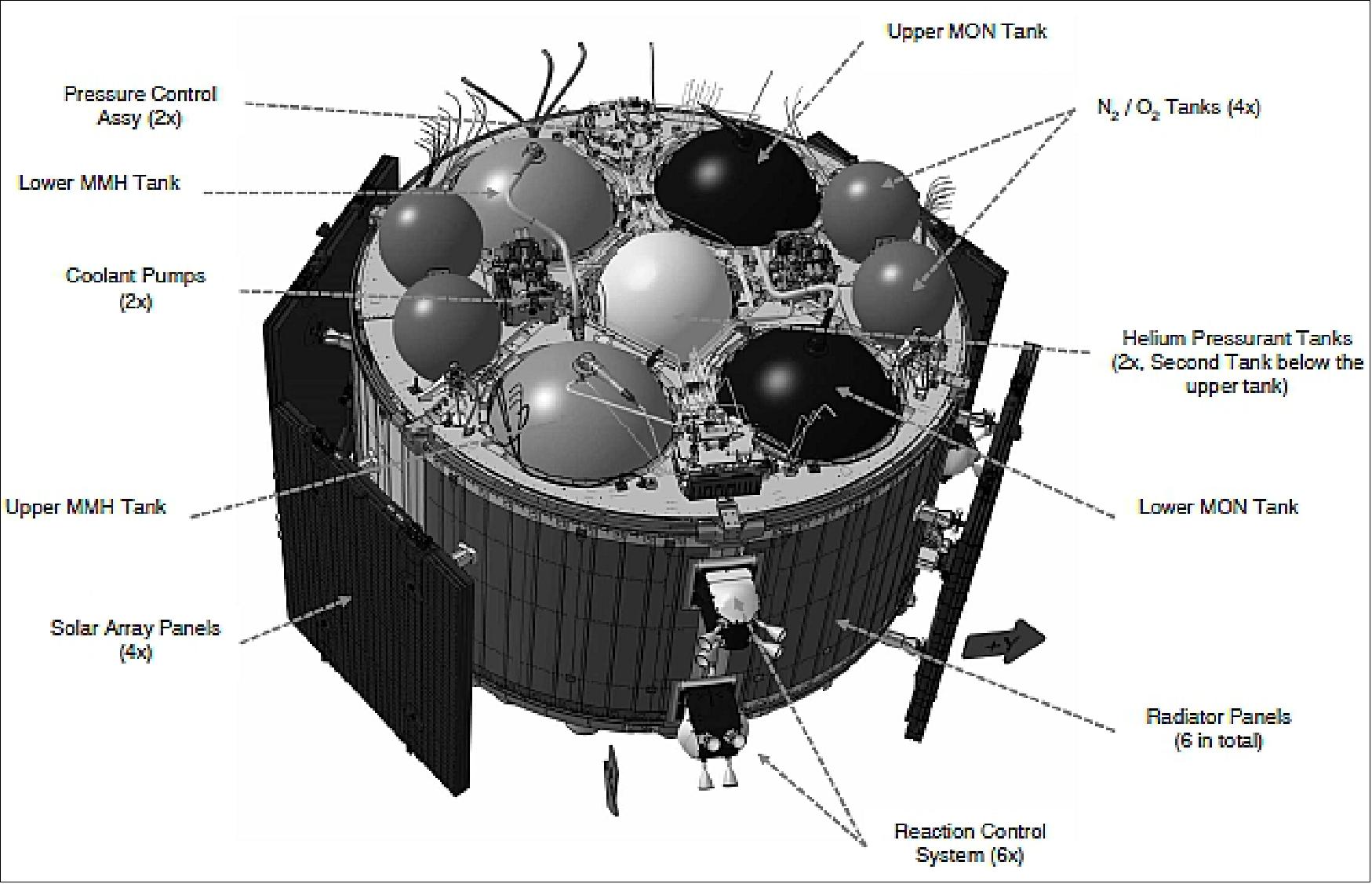
Physical architecture: The ESM is a cylindrical unpressurized module which interfaces at its bottom to the SA and at its top to the CMA. The OMS-E (Orbital Maneuvering System -Engine), i.e. the main engine, protrudes into the SA. Equipment on the tank platform is also allowed to protrude into the CMA. The total height of the ESM is 4.0 m.
The cylindrical shape is defined by the external radiators which enclose the body of the ESM. The function of the radiators is twofold, i.e. to radiate heat, and to serve as the first barrier of the MDPS (Micrometeoroid and Debris Protection Subsystem ). Mounted to the back side of the radiators are Nextel and Kevlar blankets which serve as the second barrier. The externally mounted RCS (Reaction Control System) pods and SAWs (Solar Array Wings) must be designed such that these respect the Orion SAJ allowable envelope.
The internal accommodation of the ESM subsystem equipment is highly dependent to the primary structure architecture, based on seven separate bays for accommodation, six located circumferentially about the central bay. The pressurant tanks are accommodated in the center bay. The four largest bays are used for the accommodation of the propellant tanks which dominate the available volume. The remaining volume provides accommodation to the avionics equipment, CSS (Consumable Storage Subsystem) water tanks, harnessing and tubing.
The top surface of the ESM is dominated by the protruding tank domes for the propellant subsystems, one of the helium pressure tanks, the four tanks for Oxygen and Nitrogen, and the Flow Control Assembly for the active cooling subsystem. These elements protrude into the CMA, while maintaining a specific minimum distance to the CM Heat Shield. For these elements above the tank platform, the CMA provides the MDPS protection.
The lower surface is dominated by the OMS-E, which serves as the main engine of the ESM, and the eight auxiliary thrusters. Within the lower platform, a panel is incorporated through which the UPC (Unpressurized Cargo) is installed, and optionally ejected.
Total launch mass | 13,500 kg for Lunar Mission, including 8600 kg of usable propellant, 240 kg of potable water, 30 kg of N2 and 90 kg of O2 |
Dimensions | - ∅=5.2 m (with solar wings stored), L=4 m, deployed solar array span: 19 m |
Cargo | 380 kg (max), maximum volume of 0.57 m3 |
Solar array power | 11.2 kW |
Propulsion | - 1 main engine, ca. 30 kN |
Functional architecture: Orion functionalities are generally shared between ESM and CMA/CM. Functional Chains gather equipment of the ESM which participate to a same service provided by Orion for the accomplishment of its mission.
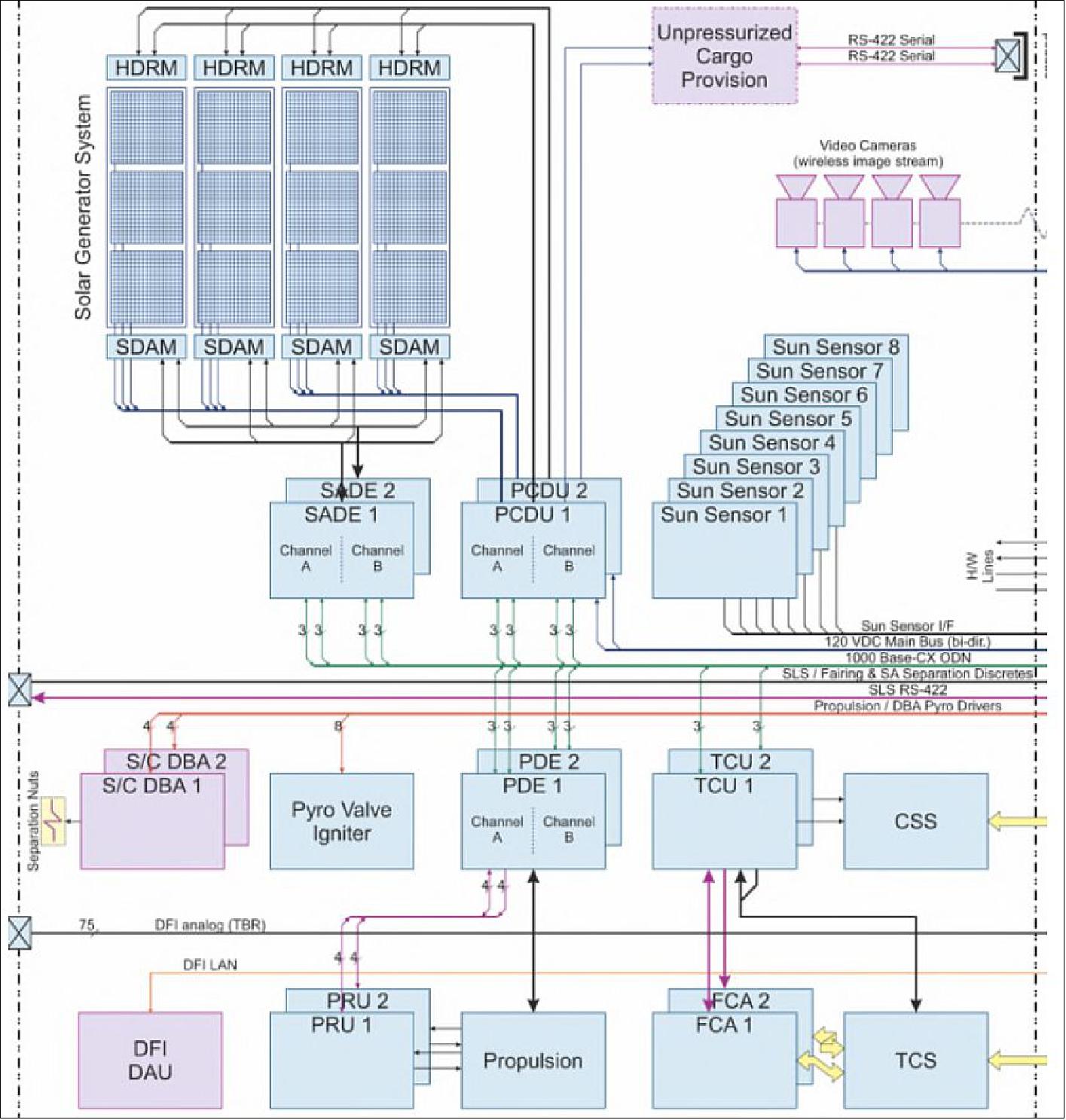
Figure 17 depicts the overall avionics subsystem architecture and interfaces. The interface to the SLS launcher is depicted on the left side of the drawing, and the CM and CMA (labeled as SM-CM I/F Adapter) are on the right side. The main link with Orion CM on-board computers is the ODN (On-board Data Network), based on a time-triggered Ethernet solution. This interface ensures the connection of all ESM avionics to the on-board computers and allows the ESM to receive commands and to deliver monitors.
Few discrete lines ensure the independent command of ESM power subsystem electronics, allow to acquire signals from 8 sun sensors used as back-up AOCS sensors and allow the transfer of data acquired from the development flight instrumentation.
The four SAWs (Solar Array Wings) ensure a maximum electrical power production of 11.2 kW, to cope with a CMA/CM power demand of maximum 7.3 kW to be respected with one wing failed.
Four power buses allow powering to / from the CMA/CM depending on mission phases. Additional and independent power lines are provided for the wireless cameras installed on top of SAWs.
Finally, a dedicated pass-through harness connects the CMA to the SA/SAJ and launcher to allow transfer of monitoring data and separation commands.
ESM Layout
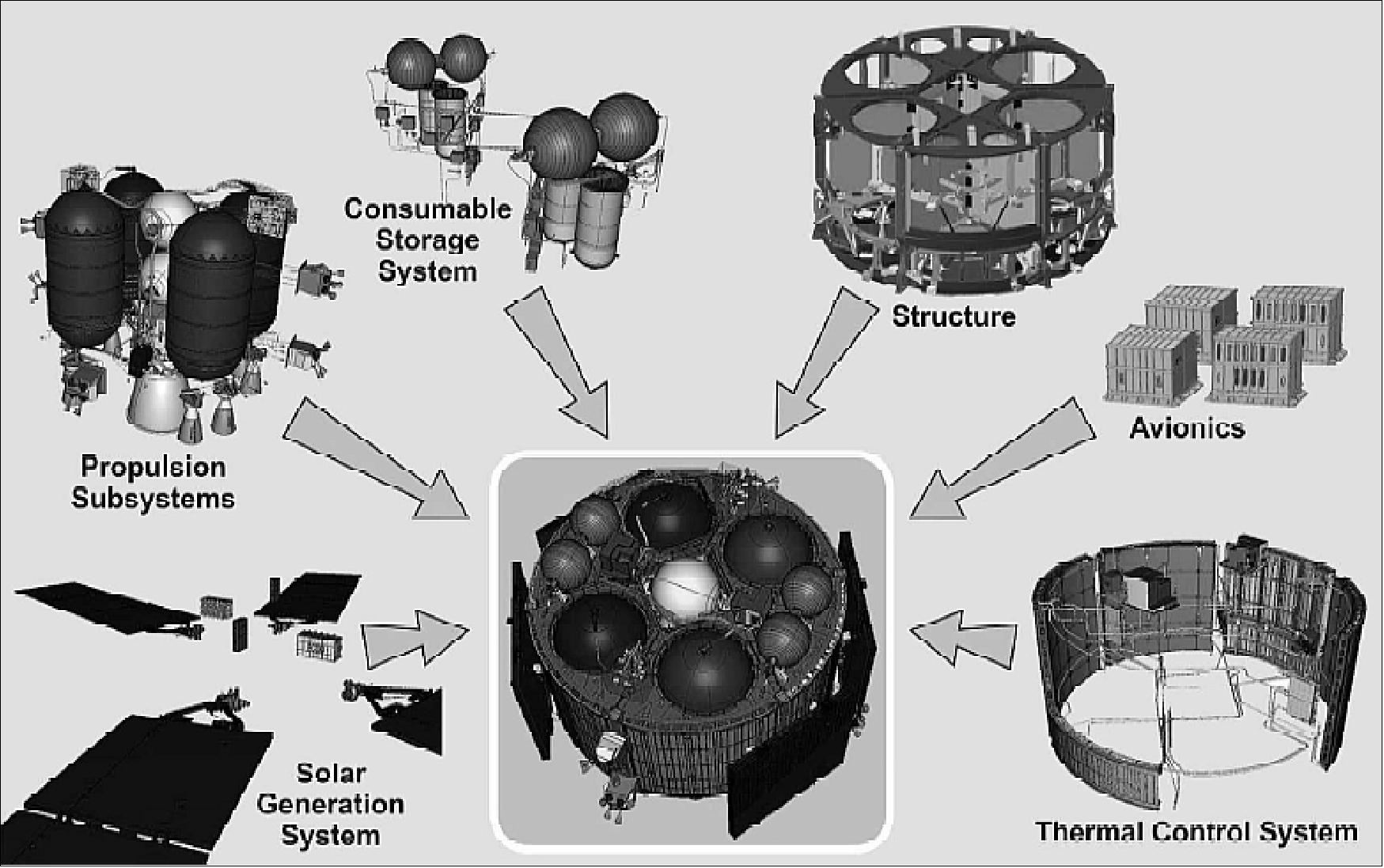
The ESM provides translational and 3-axis attitude control for the spacecraft, stores consumables for the crew module and provides power via the solar arrays. The ESM is also being designed to carry cargo. The main subsystems of the ESM are: 21)
• Structure Subsystem
• TCS (Thermal Control Subsystem)
• CSS (Consumable Storage Subsystem)
• PSS (Propulsion Subsystem)
• EPS (Electrical Power Subsystem)
• Avionics Subsystem
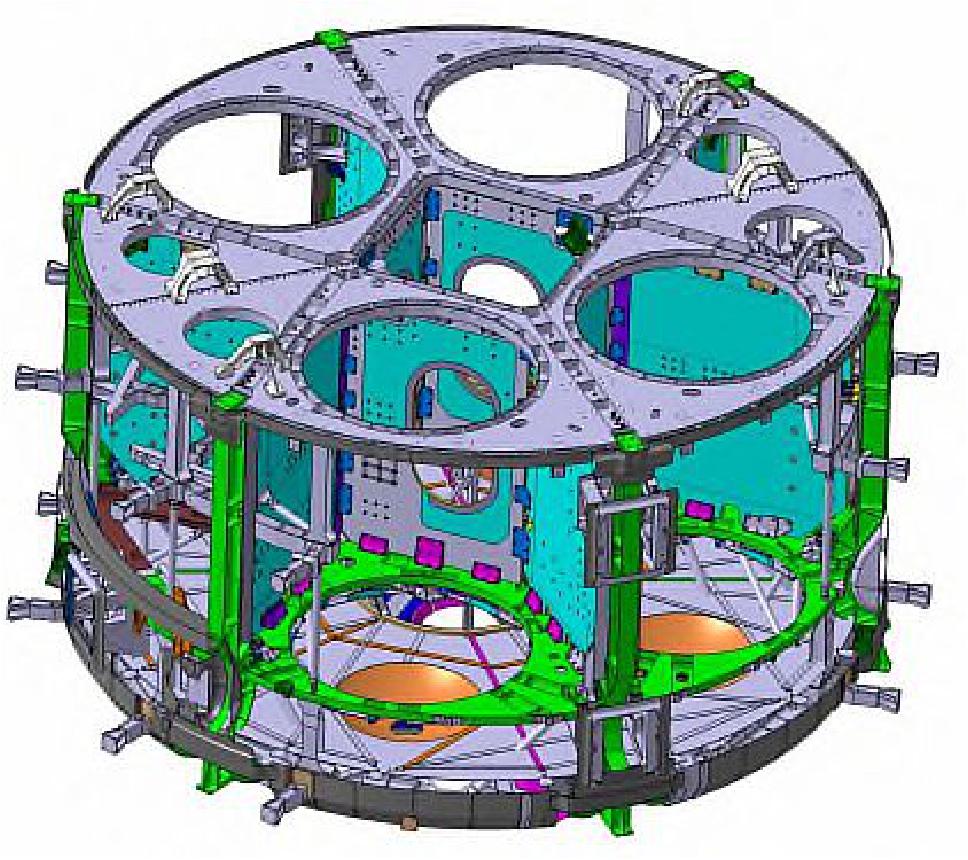
Structure subsystem: The ESM astructure consists of the following major elements:
• Primary structure
• Secondary structure
• MDPS (Meteoroid and Debris Protection).
The primary structure transmits the SLS launch loads to the upper composite composed of the CMA, the CM, and the LAS, then supports the upper composite aerodynamic and inertial loads as well as the ESM inertial loads generated by the ESM internal equipment. The design is based on a shared load path between the ESM and the external SAJ fairings. The objective is to minimize the loads applied on the ESM mechanical structure in order to optimize its mass which is propelled all along the mission, whilst the SAJ capability is sized to the extent possible by the main launch phase, since the SAJ mass is jettisoned early during the launch. The primary structure is composed of:
• 6 longerons (machined aluminum) linked to the CMA frame and six pyronuts that separate the ESM from the Spacecraft Adapter
• Tank bulkhead (machined aluminum) supporting the four propellant tanks, as well as the gas delivery CSS tanks, ensuring the main link between the CMA lower interface ring and the rest of ESM structure.
• "Radial" shear webs and internal "square" webs assembly (composite sandwich panels), housing most of the ESM equipment, including water tanks and SAW support frames and propulsion high pressure system. It forms the ESM core attached to the tank bulkhead, longerons and lower closeout panels. The main engine is attached to the central square tube panels via struts transmitting the thrust.
• Lower Platform (machined aluminum) on which the equipment is connected: OMS-E main engine, auxiliary thrusters supports, RCS pods supports, SAD (Solar Array Drive) mechanism, and PIE (Propulsion Isolation Equipment).
• MDPS covers and aft closure panels to protect the ESM from the MMOD (Micrometeoroid and Orbital Debris) environment.
The secondary structures support the ESM equipment carrying the inertial and dynamic loads of the equipment during launch and transmitting in-orbit thrust and inertial loads.
The MDPS is partly metallic and partly composed of Nextel reinforced MLI (Multi-Layered Insulation). Debris and meteoroid particles with velocities up to 24 km/s hit the outer wall, forming a cloud of lower energy particles which are then contained by the inner wall, preventing any penetration of the ESM.
TCS (Thermal Control Subsystem): The TCS includes an ATCS (Active Thermal Control Subystem), a PTCS (Passive thermal control Subsystem) and the TCU (Thermal Control Unit).
11) ATCS (Active Thermal Control Subystem): The ATCS is designed to collect the thermal loads from the CM and from the ESM powered equipment and to reject them toward the space radiative sink. The ATCS architecture is based on a Single-phase Fluid Loop Architecture using the HFE-7200 coolant to collect and to transfer the heat loads from both ESM avionics (via cold plates) and CM (via Inter-Loop Heat Exchanger) and to reject them through specific body mounted radiators. The ATCS is composed of two fully independent loops working simultaneously (hot redundancy approach). The schematic of the ATCS architecture is presented in Figure 21.
Each ATCS loop is composed by the following main components:
• 1 Radiator Assembly commonly used for both loops and composed of 4 full height radiators and 2 split radiators (with lower part not removable) mounted in serial configuration
• 1 CP (Cold Plate)
• 2 online APSBs (Absolute Pressure Sensor Blocks)
• 1 wet on-line TSB (Temperature Sensor Block)
• 1 FCA (Fluid Control Assembly) including redundant pumps with relevant passive accumulator and a TWMV (Three-Ways Modulating Valve)
• Hard/flex hoses, tees, couplings and restrictors.
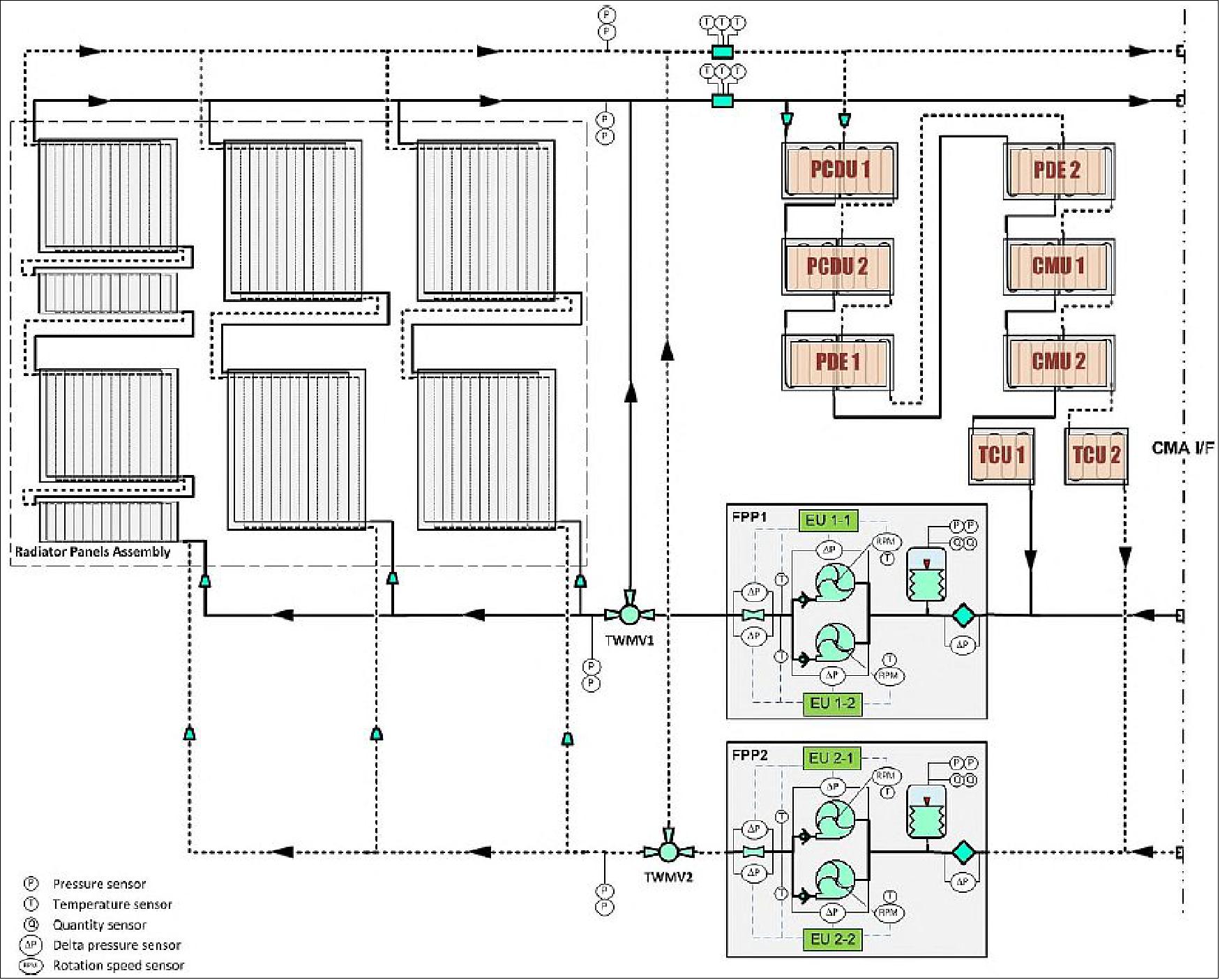
The FCA is controlled by the TCU to provide constant mass flow rate inside the loop. In particular two flow rate set points are foreseen, one for nominal operation and one for contingency (with only one loop operative). The FCA also includes the TWMV, controlling the temperature at the ESM-CMA interface.
The external surface of the radiator panels is coated with a specific paint characterized by the following thermal-optical characteristics:
• Alpha (α) = 0.2
• Emissivity (ε) = 0.8.
The Cold Plates are devoted to collect the entire thermal load from the ESM avionics boxes. Their design is constituted by a stainless steel channelling enclosed in an aluminum casting acting as a plate in direct contact with the thermally active unit. Different Cold plate sizes, to satisfy the different configuration needs, are foreseen.

12) PTCS (Passive Thermal Control Subsystem): The PTCS provides the thermal control of ESM hardware (propulsion, CSS, power and avionic items) and reduces the temperature gradients and minimize heat flows through the internal elements. The PTCS has two main components, heaters (with thermistors and wire heater) and insulation (MLI thermal blankets, including some specific high temperature MLI blankets, for thrusters and engine nozzle thermal impingement protection).
The MLI protects the internal parts against the external environment and heater lines compensate the heat leaks toward space. Different MLI typologies, in terms of composition, have been identified for the different applications on the ESM. The MLI composition mainly depends on exposure or not to the space, geometry & fixation interfaces and exposure to thrusters plume flux and nozzle radiation.
Two cold redundant heater lines managed by the TCU assure thermal control and temperature uniformity in the Orion internals and for the local thermal control of specific items. In addition, heater lines managed by thermostats and powered by the PCDU (Power Control and Distribution Unit) provide a further redundancy to the environmental control function.
13) TCU (Thermal Control Unit): The TCU is designed to ensure the management of the TCS and of the CSS.
For the ATCS, the TCU acquires the various parameters from the ATCS sensors, monitors and commands the ATCS valves, and issues commands to the FCA (Flow Control Assembly).
For the PTCS, the TCU commands the heater chains and monitors the thermistors. It operates according to activation and de-activation thresholds defined and modified by the CM on-board computers, while ensuring bus interface and power supply logic.
For the CSS (Consumables Storage Subsystem), the TCU commands the valves and monitors their position. It also monitors the pressure and temperature parameters in the subsystem to support the system FDIR (Failure Detection, Isolation and Recovery).
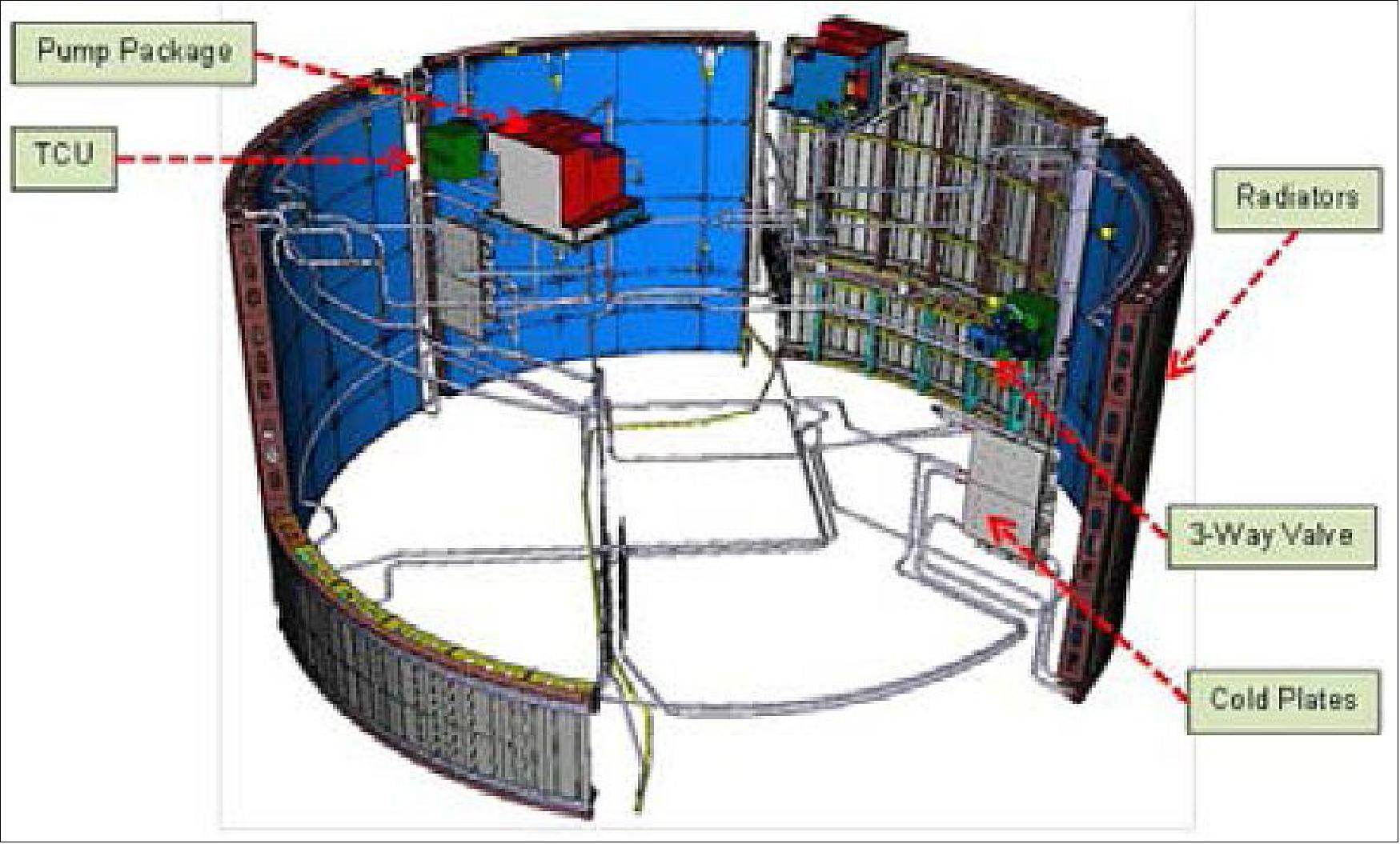
CSS (Consumable Storage Subsystem): The CSS provides potable water, oxygen and nitrogen to the CM. It can also provide water for the sublimator located in the CMA via a dedicated kit composed by its own tank assy and distribution system, to be installed optionally for specific missions. It consists of the following major elements:
• WDS (Water Delivery Subystem)
• GDS (Gas Delivery Subsystem)
The architecture of the WDS is composed of the following components:
• Water tanks (metal bellow technology)
• Water on/off valves, (isolation valves)
• Temperature and quantity sensors
• 2 distribution lines towards the CMA I/F to supply water for the different CM/CMA needs.
The architecture of the GDS is composed of the following components:
• Gas tanks
• Gas pressure regulators
• Gas on/off valves, (isolation valves)
• Gas relief valves
• Temperature and pressure sensors
• Hydrophobic filters upstream the water tanks
• Distribution lines towards the CMA I/F to supply oxygen and nitrogen
• Distribution lines towards CMA I/F for GDS filling on ground from the GSE.
In the case of a configuration with WSK (Water Sublimator Kit) a set of 3 additional water tanks is introduced and interconnected to the others tanks and lines of CSS.
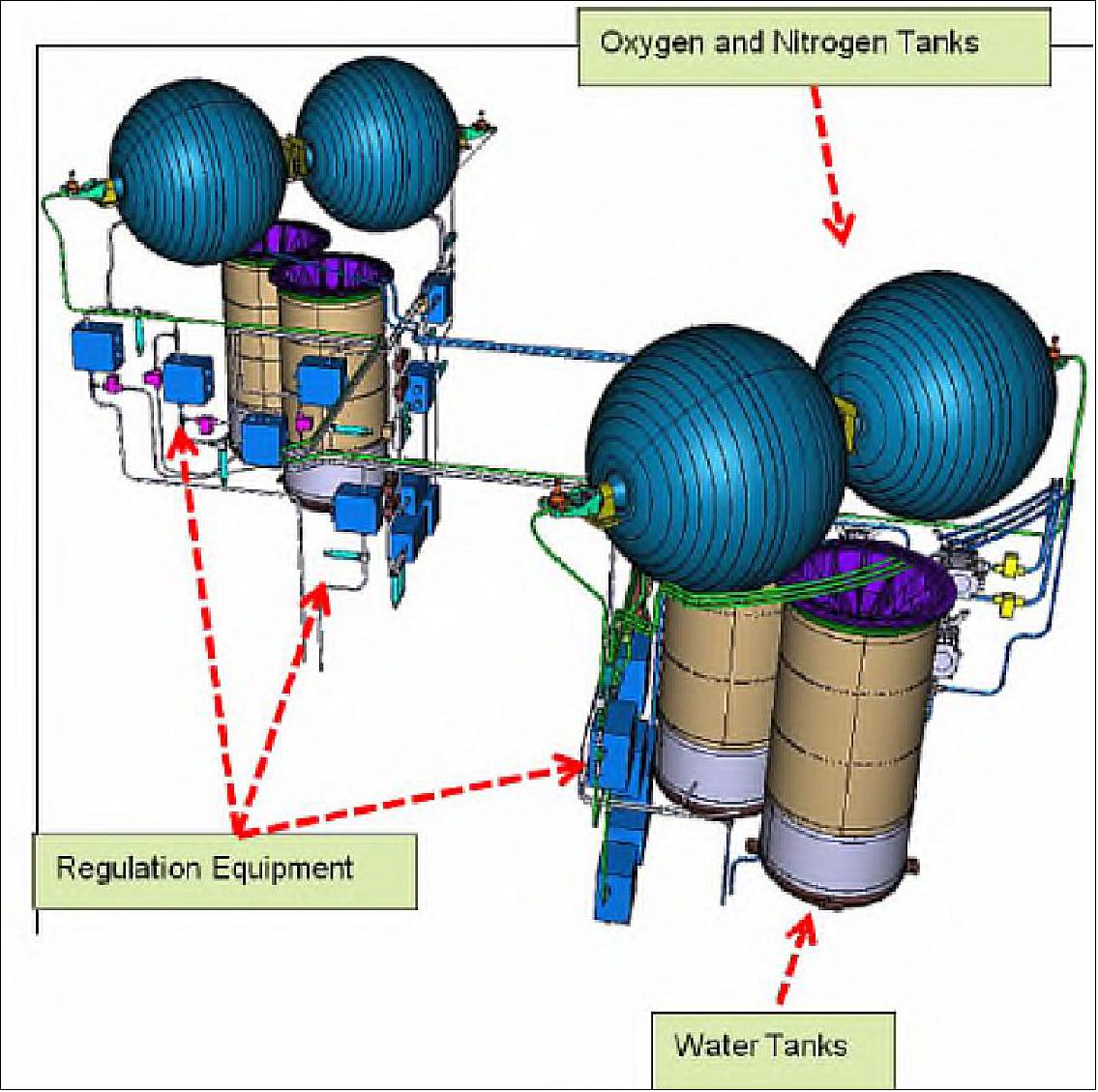
PSS (Propulsion Subsystem): The propulsion subsystem design has to cope with a complex mission scenario. It includes three different types of engines / thrusters. Each of these thrusters utilizes the same propellants: MON-3 (Mixed Oxides of Nitrogen) as oxidizer and MMH (Monomethylhydrazine) as fuel.
The single Main Engine, which is one of the Shuttle OMS-E engines (27.7 kN), is delivered by NASA as GFE (Government Furnished Equipment) and will be used during ascent abort and trans-earth injection maneuvers as well as orbit change maneuvers. This engine is gimballed with an amplitude of ± 7° around both axes (pitch and yaw). The actuation is performed by the TVC (Thrust Vector Control).
The 8 auxiliary thrusters which are similar to those used on ATV (490 N) are used during ascent abort and launcher separation together with the main engine. They are also used as backup to the main engine for trans-earth injection and for trajectory correction maneuvers.
The 24 RCS thrusters which are the same as used on ATV (220 N) provide the impulse necessary for attitude control, small maneuvers and forced translation during Rendezvous and Proximity operation. These thrusters are accommodated into six pods. Two pods are composed of four roll thrusters, placed along the ESM lateral surface under the CMA, while four other pods are composed of four thrusters, placed along the ESM lateral surface under the level of the first four pods. Each propellant type is stored in two propellant tanks, both sets of propellant tanks being arranged in a series configuration.
The propellant distribution comprises several electromechanical valves for propellant isolation and pressure transducers interconnected via pipes. The assembly ensures isolation of the engine / thrusters from the propellant tanks during launch, docked phase to the ISS and other mission events where it becomes necessary to isolate the engine / thrusters from the propellant storage. The propellant distribution network provides the connections between the propellant tanks and the isolation valves and then onwards to the thruster assemblies. Fill and Drain Valves and the related access lines are used during ground testing and for loading and unloading of the propellant and pressurized tanks. They are located in the CMA to enable access even after the SAJ around the service module has been installed.
The propulsion subsystem is controlled by the PDE (Propulsion Drive Electronics) which handles all nominal propulsion related commands issued by the CM and provides feedback via the CMA PDUs (Power Distribution Units) and the PDUs to the vehicle management computer interface and the ESM network. The PDE controls all thrusters, the TVC and the associated valves, instrumentation and leakage detection.
The PRU (Pressure Regulation Unit) controls and monitors the operation of the pressure regulation valves, based on set points defined and modified by the on-board computers. The EPR (Electronic Pressure Regulation) selected for ESM has the advantage to optimize the pressure of propellant and oxidizer according to the engine in operation, at the price of an increased development risk for this function.
The EPR of the propulsion system propellant is a new technology for the European industry. The ATV design featured a mechanical pressure regulation like the propulsion system of the Shuttle OMS-E engine. The electronic pressure regulation allows a better control of the pressure, hence the fuel and oxidizer consumption is enabling to reduce propellant margins and the overall mass at launch. Airbus DS decided to venture in that new technology as a result of a trade-off taking into account the positive results obtained by Lockheed-Martin in breadboard testing. However, in the development of a new technology there is always the risk of not being successful especially if the development time is constrained.
To mitigate the impact to the project in case of unsuccessful development, it was decided to ensure that reverting to mechanical pressure regulation would be possible with minimum schedule impact. NASA provided Shuttle mechanical pressure regulators and valves to VACCO, the original manufacturer and Airbus DS ordered tests to ensure the hardware would satisfy the performance required for the ESM. Breadboard testing of the electronic regulation performed in Europe up to now delivered promising results and the probability of having to revert to mechanical pressure regulation is becoming more remote.
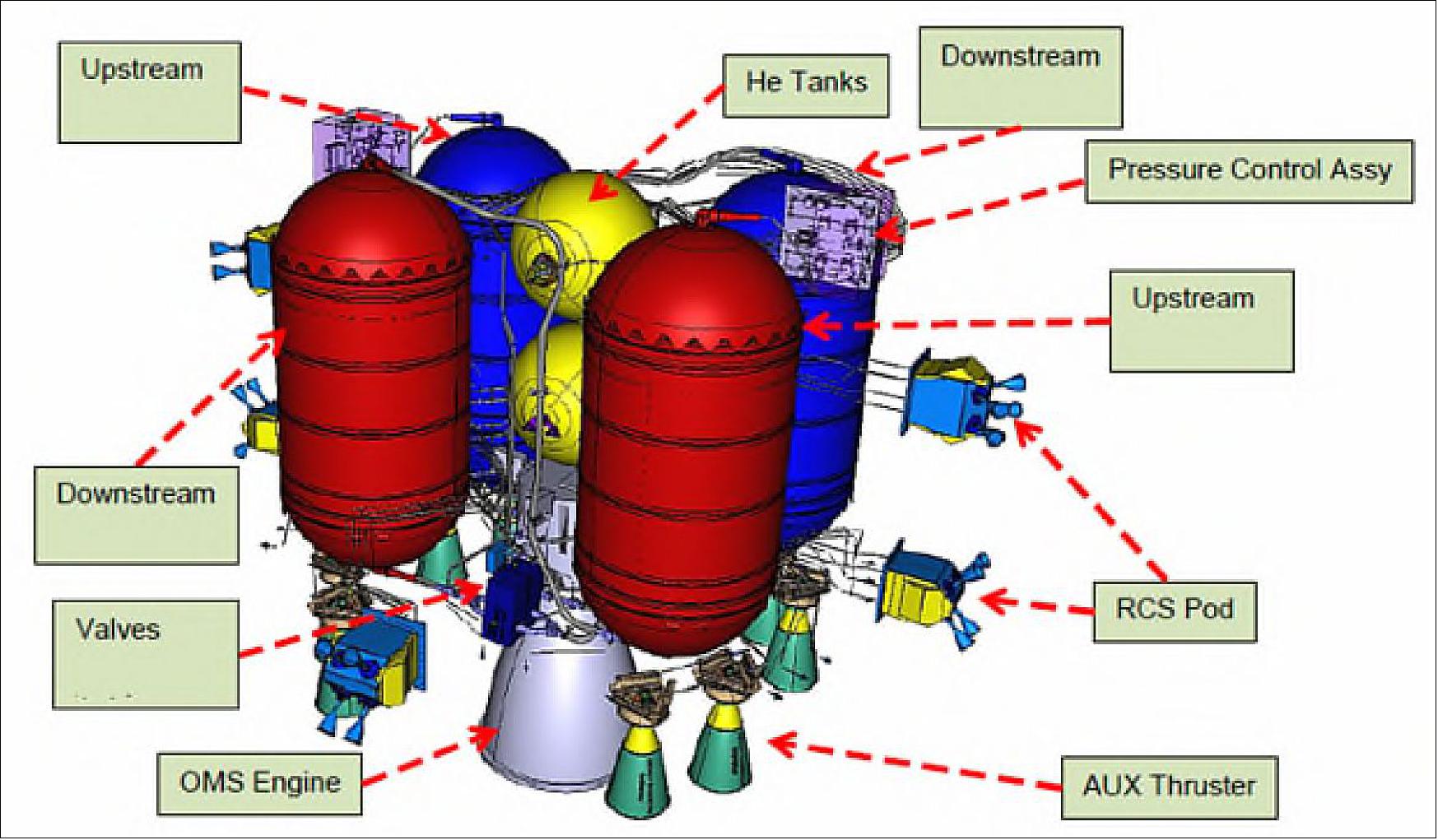
EPS (Electrical Propulsion Subsystem): The EPS has the function to generate the power for all modules of Orion. It manages the power provided by its 4 SAW (Solar Array Wings). The PCDU (Power Control and Distribution Unit) provides the power I/F to the SAW and CMA, distributes electrical power to ESM users and protects the power lines.
The power generation part of the ESM EPS consists of four SAW units. Each wing is composed of three deployable CFRP (Carbon Fiber Reinforced Polymer) rigid panels covered with triple junction GaAs solar cells forming nine (9x) sections of solar cell strings. In nominal condition the SAW can supply a total 11.2 kW. Each SAW is linked to the ESM structure by a two degree of freedom SADA (Solar Array Drive Assembly). The SADA ensures the power and signal transfer from the SAW to the PCDU. It is composed of SADM (Solar Array Drive Mechanism) and a (SADE (Solar Array Drive). The SADM allows orienting the SAW in two independent axes. In the Sun-tracking mode the inner axis can swivel between -35º and +25º, while the outer axis has a continuous rotation capability (0º; +360º).
SADM of the ESM has a unique design incorporating a two axis gimbal. An inner axis provides rotation of the SAW about an axis perpendicular to the ESM longitudinal axis, and an outer axis which rotates the SAW about its own longitudinal axis. The two-axis capability is necessary for two reasons:
1) allow maximum sun tracking to meet the power requirements for particular vehicle attitudes of certain mission phases. Insufficient power is generated by the SAW with a single (roll) axis SADM not providing the avoidance capability of the shadowing effect of both the Orion vehicle on the SAW and the SAWs on each other
2) insure the structural integrity of the SAWs under injection maneuvers. For the trans-lunar injection performed with the upper stage of the Space Launch System rocket, actually the iCPS (interim Cryogenic Propulsion Stage), the arrays are canted backwards to sustain in deployed configuration the 1 g acceleration load. For the trans-earth injection performed with the ESM main engine, the acceleration is less severe and the arrays have to be canted forwards to prevent damages from the OMS-E engine plume while minimizing the load on the SAWs.
The SADM also allows repositioning (canting) of the SAW to reduce the loads on the SAW and SADM during the different Orion orbital maneuvers. At TLI (Trans-Lunar Injection), a 0.5 g acceleration is generated by the iCPS engine and at LOI (Lunar Orbit Insertion) and TEI (Trans-Earth Injection) a 0.3 g deceleration is generated by the OMS-E engine.
As shown in Figure 26, in order to reduce these loads to an acceptable level, the SAWs need to be repositioned by the SADM. In TLI, the SAWs are thus canted during the maneuver to inner axis = - 60º / outer axis = 0 º. In LOI/TEI, the SAWs are canted to inner axis = +55º / outer axis = 0º.

The EPS distributes the generated power to the CMA/CM through four independent 120 V busses. The power interfaces of the PCDU protect each unregulated bus from overload or short circuit failures on feeder busses outside the PCDU. They are implemented with power devices connected in parallel and independently operated for power flow from PCDU to CMA PDU, plus a number of power diodes for power flow from CMA PDU to PCDU.
Avionics Subsystem: The high-level management of the vehicle and its functions is performed at the level of the Orion on-board computers. The ESM is controlled and monitored by specific electronic controller units. All units are connected via the ODN (Onboard Data Network) to the CMA/CM. All vehicle control and management software resides in the CM computers. The ODN is a three plane TTGbE (Time Triggered Gigabit Ethernet),1000Base-CX, according to standard SAE AS6802.
The Time-Triggered Gigabit Ethernet ODN provides a set of time-triggered services implemented on top of standard IEEE802.3 Ethernet. It provides the capability for deterministic, synchronous, and congestion-free communication, unaffected by any asynchronous Ethernet traffic load. By implementing this standard in network devices (network switches and network interface cards), Ethernet becomes a deterministic network. This means that distributed applications with mixed time-criticality requirements (e.g., real-time command and control, audio, video, voice, data) can be integrated and coexist on one Ethernet network.
Each of the ESM controller units is connected via a SNIC (Standard integrity Network-Interface Card), according to Honeywell ICD8273722, to the LAN switch located in the CMA. The SNICs have three ports for two failure-tolerant communication on three network redundancy planes.
Development: The challenging schedule of the program, with the ESM delivery planned for early 2017 and the EM-1 launch planned for 2018, is influencing the way the ESM is verified. Qualification has often to run in parallel to EM-1 flight model manufacturing and integration, bringing risk to the program. This risk is carefully monitored and risk reduction strategies are in place to ensure the program can proceed smoothly. The ESM verification is mostly accomplished at module level. A limited number of verifications is planned on the EM-1 flight model.
- The system PDR (Preliminary Design Review) was successfully concluded in the summer 2014.
- The system CDR (Critical Design Review) is scheduled for the end of2015 and will conclude with the board in February 2016.
Key aspects for an international partnership in the Orion program
The decision to include an International Partner in the development of Orion is beneficial for NASA, enlarging the cooperation on human explorations and strengthening the international partnership.
• ESA also benefits of the ESM program because it allows to retain in Europe the experience acquired with ATV program, to participate to the exploration endeavour, and to develop additional capabilities for use toward future ESA missions.
• Both NASA and ESA, together with their industrial partners, are committed to that goal of achieving the program objective in spite of the complex interface management needed and of the challenging schedule.
Development Status
• October 13, 2021: The second European Service Module for NASA’s Orion spacecraft is on its way to USA. It is the last stopover on Earth before this made-in-Europe powerhouse takes the first astronauts around the Moon on the Artemis II mission. 22)
- An Antonov aircraft sent the module across the Atlantic in a custom-built container this morning from Bremen, Germany. Upon arrival at the Kennedy Space Center in Florida, the second European Service Module (ESM-2) will be connected to the crew module. Together they form the Orion spacecraft.

- The service module is a critical element for Orion – it provides propulsion, power and thermal control and will supply astronauts with water and oxygen.
- With parts made in ten countries in Europe, there is one element that returns to American soil after testing in Germany: the service module’s main engine is a refurbished engine from Space Shuttle Atlantis that will steer the spacecraft on its way to the Moon.
- Extensive testing awaits before integration with the launcher. Artemis II will be the first crewed mission to the Moon since the Apollo 17 mission in 1972.
- “This is another big step forward to the Moon for ESA. Our astronauts will fly to the lunar Gateway aboard Orion. Meanwhile, we are working to have ESA astronauts on the Moon by the end of this decade, and keep our sights on Mars as the horizon goal of human exploration,” says David Parker, ESA’s director of human and robotic exploration.
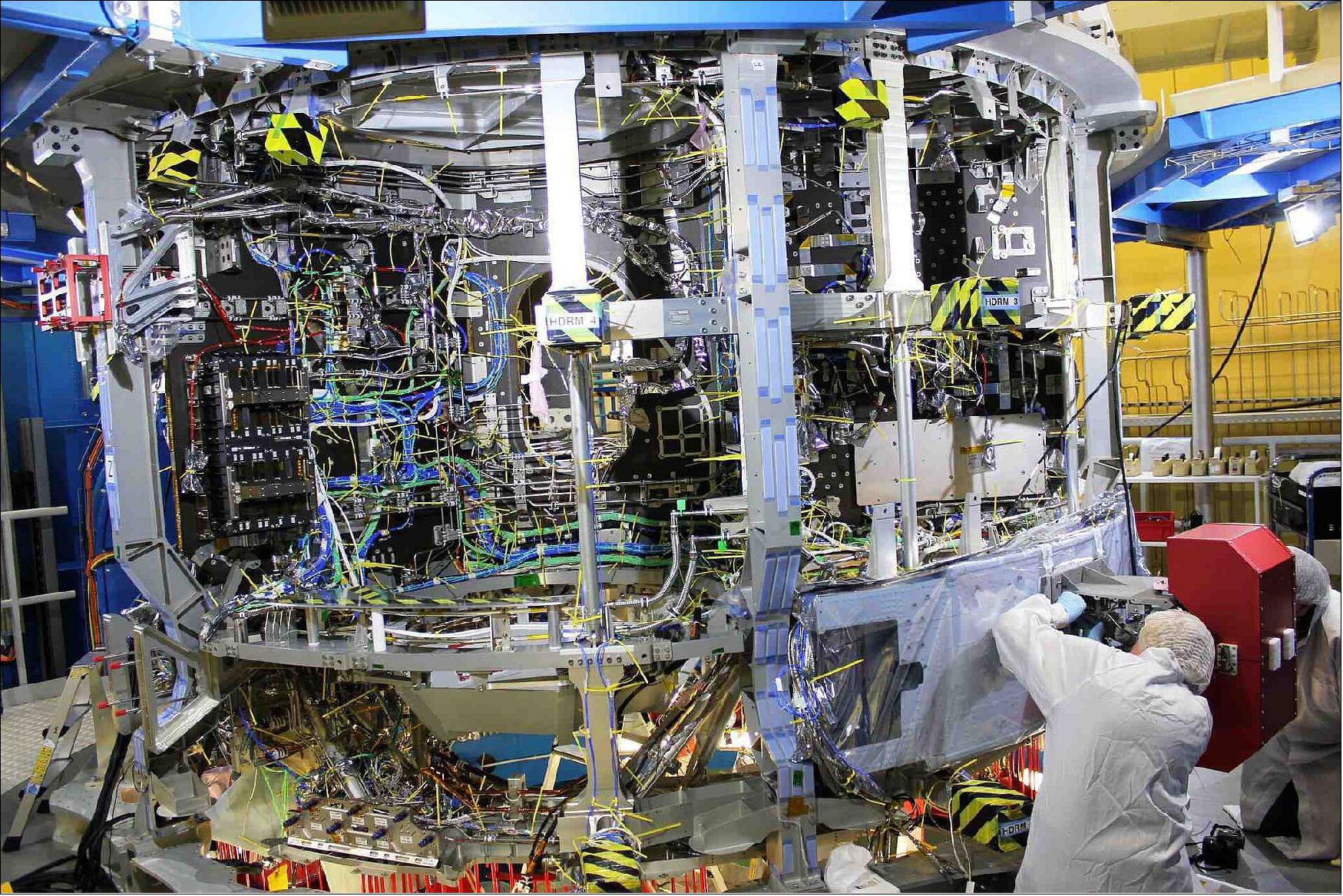
- ESA is delivering up to six modules to NASA, with three more currently under negotiation for the lunar Gateway. Airbus is ESA’s prime contractor for building the first six service modules.
Full Moon Schedule
- The Kennedy Space Center is humming with lunar activity this week. For the first time, three Orion spacecraft will be there at various stages of assembly and integration.
- The first Orion spacecraft will be integrated on top of the Space Launch System rocket in its final preparations for the uncrewed Artemis I mission. The European Service Module will take the spacecraft more than 64,000 km beyond the Moon in a test flight to demonstrate its capabilities.
- “Agencies, industry and teams from different continents are working around the clock in a tremendous international effort to take this complex spacecraft to the launch pad,” said Cathy Koerner, NASA Orion program manager, during a press event held by Airbus last week.
- Two arrivals mark the lunar week on site: ESM-2 and the main pressure vessel for Artemis III, which will see the first woman and next man setting foot on the Moon.
- In Europe, the third European Service Module is at the start of its integration phase where equipment dummies, brackets and harness will be added to the structure.
• October 6, 2021: The European Space Agency is playing a vital role in humankind’s return to the Moon. In a few months NASA will launch Artemis I from the Kennedy Space Center. The uncrewed mission will carry NASA’s Orion spacecraft incorporating ESA’s European Service Module (ESM-1), built and tested by Airbus Bremen, in Germany, with the help of 10 European nations. ESM-1’s main engine and 32 thrusters will propel Orion into orbit around the Moon and return it to Earth. 23)
- As Artemis I prepares for launch, the second European Service Module (ESM-2) is about to ship to the US with ESM-3 also currently under construction. The second Artemis mission, however, has a crucial difference: it will carry four astronauts for a lunar flyby. ESM-2 will provide propulsion, power, oxygen, water and life support as well as controlling the temperature in the orbiting crew module. ESM-3 will go one step further and put the first person on the Moon for 50 years.
Figure 29: This film features soundbites from: Matthias Gronwoski, Chief Engineer Orion ESM, Airbus; Rachid Amerkrane, Project Manager Orion ESM, Airbus; Philippe Deloo, ESM Program Manager, ESA (video credit: ESA)
• May 14, 2021: The pieces are stacking up for the launch of Artemis 1 mission around the Moon and back. The massive Space Launch Systems (SLS) rocket that will launch the first crewless test flight of the Orion spacecraft, powered by the European Service Module, is being integrated at the Vehicle Assemble Building at NASA’s Kennedy Space Center in Florida, USA. 24)
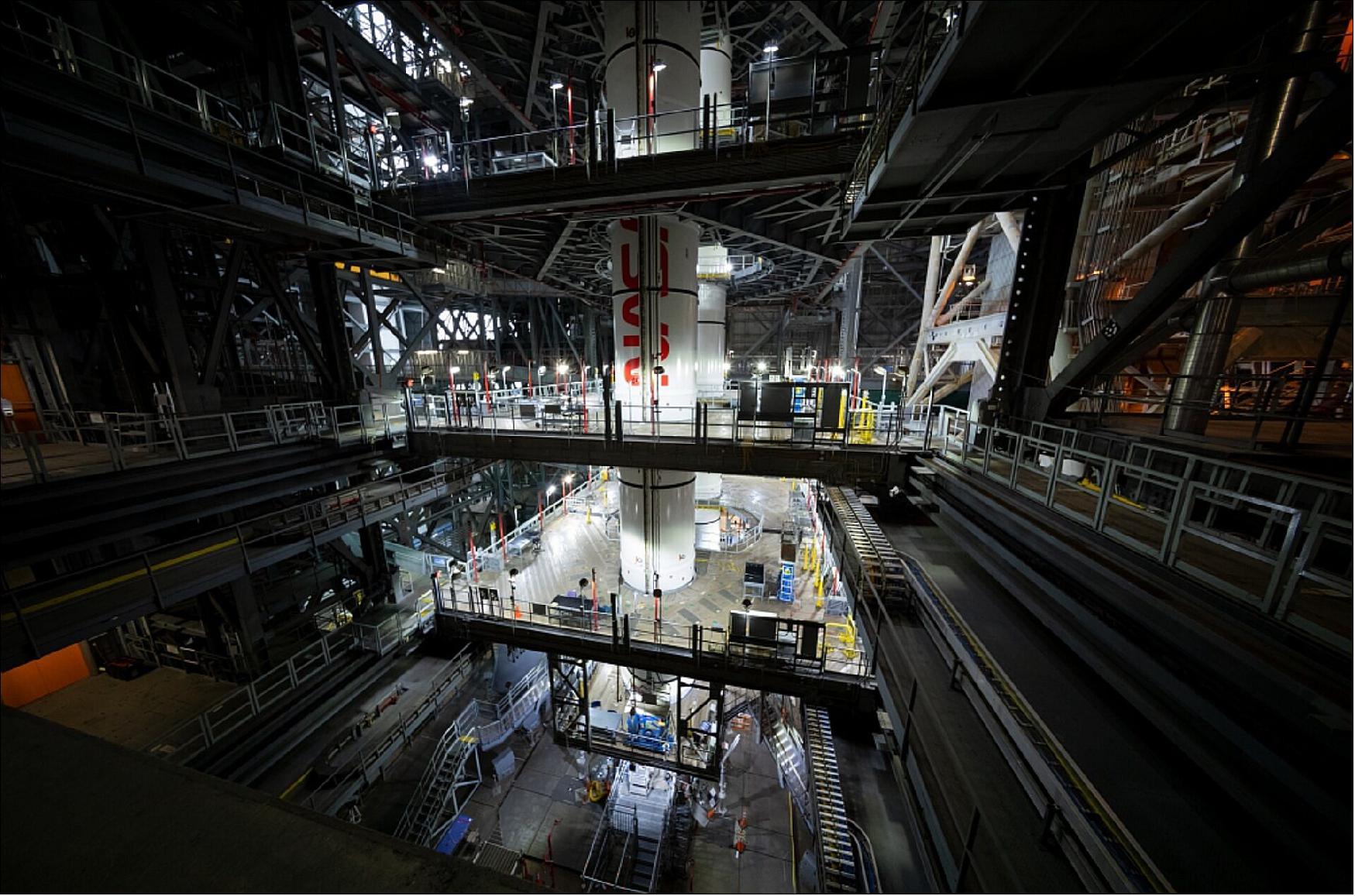
- Once the rocket stages are ready to go, the Orion spacecraft and additional flight hardware are next up for integration.
- Since our last Orion and the European Service Module update for Artemis I, the spacecraft has moved, from the NASA Kennedy Space Center’s Neil Armstrong Operations and Checkout facility, a few kilometers down the road to the Multi Payload Processing Facility. The names of these buildings give the game away. The first Orion spacecraft has been checked out and is ready for the next step on the road to space: processing for launch.
- Fuelling was completed on 1 April, after which the system will be serviced in high pressure helium that serves as a pressurization agent to the European Service Module propellant tanks, ensuring the correct pressure at the engine inlets.
- Eventually, the spacecraft will be hoisted to the top of the fully stacked SLS rocket.
- Read more updates on the Orion blog.
• April 20, 2021: Employees across NASA’s Katherine Johnson Independent Verification & Validation Facility (IV&V) are working on software safety and assurance for the Artemis program, and efforts won’t end with the next steps on the Moon. 25)
- The Artemis program includes a series of robotic and human exploration missions in collaboration with commercial and international partners to establish sustainable exploration. From there comes the next giant leap – sending astronauts to Mars.
- A lot has changed since 1969, but traveling to the Moon is still in NASA’s sights with the Artemis program, and this time around the IV&V Program is here to help, according to Program Director Gregory Blaney.
- “Software is a critical element in the operation of every Artemis project. Many activities are conducted in space needing exact timing and precision while operating in a harsh environment; meaning, they must work precisely or the mission will fail,” he said. “Putting humans back on the surface of the Moon to explore and perform science is one step closer and practice for sending humans to Mars.”
- Expanding human presence farther into the solar system is part of the agency’s Moon to Mars exploration approach, which will help NASA and our partners learn more about the fundamental aspects about how planets and planetary systems form.
- Applying what we learn is key to expanding on what comes after Artemis. IV&V’s Artemis Program leaders say the missions provide a chance to work out ways of operating and solving challenges that are applicable to Mars missions while we’re relatively close to home.
- With that comes astronaut safety, and according to IV&V’s Artemis Program Manager Michael Facemire, almost everything critical to Artemis mission safety and success is also critical to astronaut safety.
- “Astronaut safety is on our minds throughout our work. Astronauts will not fly Artemis missions until at least Artemis II; however, a key objective of Exploration Flight Test-1 (EFT-1) and Artemis I is to make sure the systems and software are safe for the astronauts for crewed Artemis missions and beyond,” he said. “As we have worked EFT-1 and are working Artemis I, we are considering how the EFT-1 and Artemis I system software capabilities will be used in future Artemis missions, making sure that our assurance appropriately considers implications for astronaut safety in crewed missions.”
- Looking ahead, IV&V is contributing to the Gateway outpost around the Moon, which will support human and scientific exploration in deep space. It is a vital part of sustainable lunar exploration and could serve as a model for future missions to Mars. In addition, the powerful Space Launch System rocket that will lift the Orion crew vehicle that will carry the crew to space will evolve over future missions and allow the humans to travel deeper into space than ever before.
- IV&V’s Artemis program is continuing to put in efforts that accomplish what the mission needs today and what it will lead to in days and years to come, according to IV&V project leadership.
- As IV&V experts continue supporting the Artemis mission and the safety and assurance of its various components and software, Blaney offers reminders of how much innovation and discovery is in store for the program, agency, and space exploration in general.
- “NASA will gain critical knowledge and experience from Moon exploration activities which will enable future and further out explorations to Mars or beyond,” he said. “When doing things that have never been done before with humans in such harsh and different environments, you must explore and learn, adjust and advance, so you can explore further the next time.”
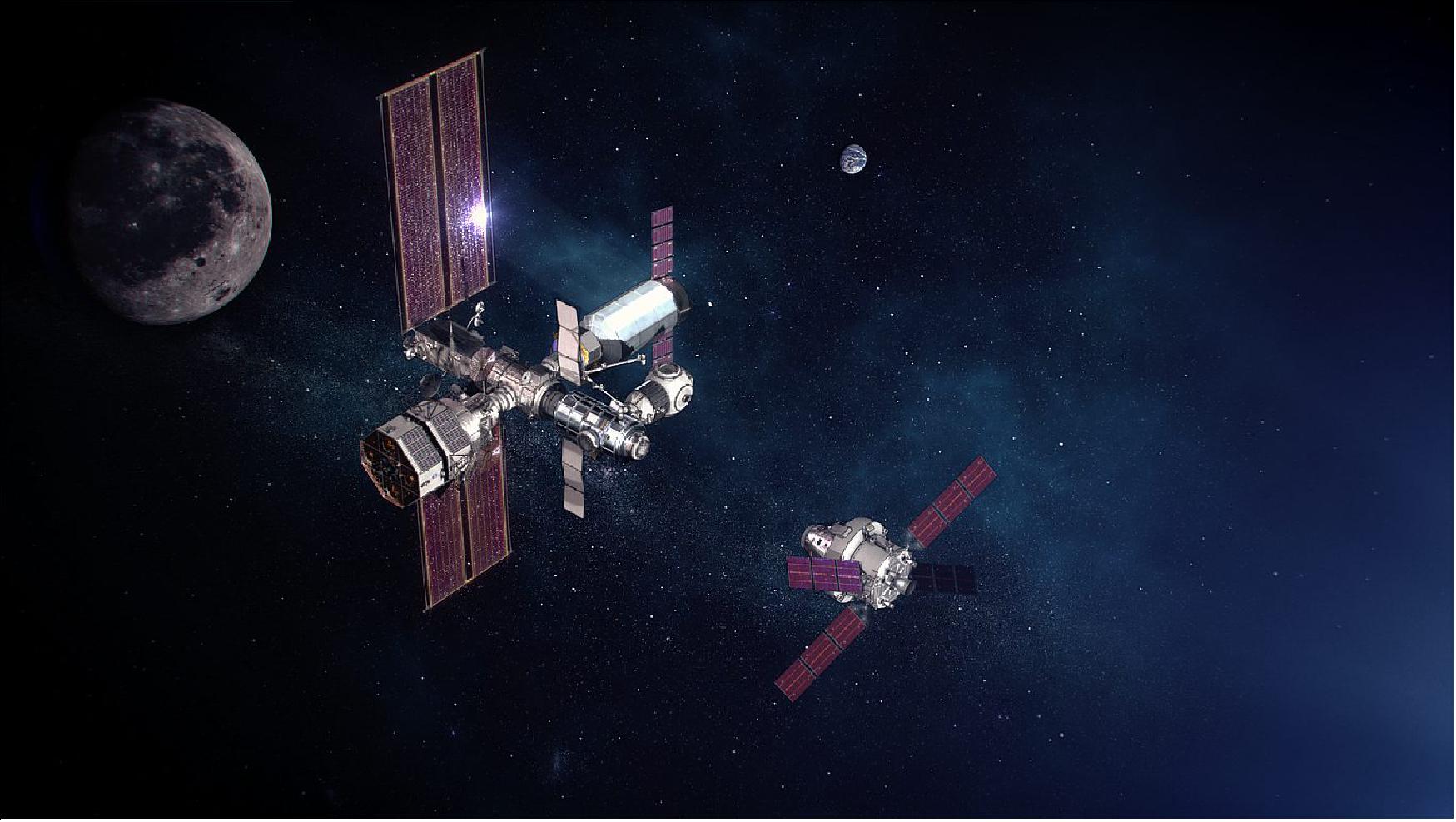
• April 8, 2021: When NASA’s Space Launch System (SLS) rocket and Orion spacecraft lift off from the agency’s Kennedy Space Center in Florida on the Artemis I mission, the amount of data generated by the rocket, spacecraft, and ground support equipment will be about 100 MB/s. The volume and speed of this information demands an equally complex and robust computer system to process and deliver that data to the launch team and corresponding mission systems in real time. 26)

- That computer software and hardware – called the spacecraft command and control system (SCCS) – is now certified for use on Artemis I. Shawn Quinn, director of NASA Engineering at Kennedy, and the KSC Engineering Design Certification Review Board signed off on the system at the conclusion of a recent design certification review for SCCS.
- The system is the electronic hub where information traveling to and from the SLS core stage, the rocket's Interim Cryogenic Propulsion Stage (ICPS), Orion, ground systems, and the operators inside the firing room intersect. During loading and launch, the software will process up to 575,000 changes per second.
- "We're flying three vehicles in parallel – Orion spacecraft, ICPS, and SLS core stage – and SCCS needs to be able to communicate with all three simultaneously," said Mike Van Houten, the Launch Control System project manager in the Command, Control and Communications organization within EGS. “While we're ‘talking’ with the spacecraft and vehicles, we're also receiving data from Kennedy’s ground systems – programmable logic controllers, subsystems in the field, and equipment on the mobile launcher.”
- Making sense of that much data is as complex as efficiently managing the real time movements of hundreds of thousands of people within a large metropolitan area, Van Houten said.
- “Each bit of telemetry data coming from a different interface is like a person arriving into the city via a plane, train, automobile, bus, or ferry,” he explained. “Just like each person, each bit of data needs to arrive at a unique destination, whether that’s a display, application, or recording. And all the movements have to be synchronized so data arrives exactly where it should be in the quickest timeframe possible.”
- All this information is integrated into the displays shown on consoles throughout Firing Room 1 and Firing Room 2 inside Kennedy's Launch Control Center, enabling Operators to make informed decisions on how to continue the activity in progress.
- Comprising a mix of custom-built software and off-the-shelf products, the SCCS was developed specifically to manage processing and launch operations for Artemis missions. As Artemis began to take shape, NASA’s Exploration Ground Systems (EGS) team and its lead contractor, Jacobs, advanced the effort to develop a robust, updated system.
- The certification marks the end of the system’s development and signals the start of the “sustaining” phase of the project for Artemis I. Moving forward, countdown and launch simulations performed by the EGS-Jacobs team will help train the launch team and fine-tune the SCCS.
- During these simulations, Operators step through prelaunch checklists to practice the procedures for liftoff and ascent. Some simulations focus on specific operations while others walk the team through critical portions of the countdown. Each rehearsal allows the team to gather useful data to refine the system.
- “The SCCS system engineering and performance teams evaluate the data after each simulation to ensure the system is performing per specifications and no unexpected errors were triggered,” Van Houten said. “It gives the SCCS team an indication of where we need to tackle problems before the next sim or operational event.”
- Lessons learned from launching the uncrewed Artemis I will help SCCS developers identify process, performance, and technical changes needed for future missions. The developers will focus on capturing new requirements and the expectations of stakeholders such as the Artemis I launch director, firing room operators, the ground support equipment team, the ground to flight application software team, the model and simulation team, and the launch training team. This information will help the SCCS developers make system upgrades to support the crewed Artemis II flight test and future missions.
- Under the Artemis program, NASA is leading the way in human exploration of deep space with increasingly complex missions to explore the Moon and prepare for future missions to send astronauts to Mars.
• November 24, 2020: NASA has stacked the first piece of the Space Launch System (SLS) rocket on the mobile launcher in preparation for the Artemis I launch next year. At NASA’s Kennedy Space Center in Florida, engineers lowered the first of 10 segments into place Nov. 21 for the twin solid rocket boosters that will power the first flight of the agency’s new deep space rocket. Artemis I will be an uncrewed flight to test the SLS rocket and Orion spacecraft as an integrated system ahead of crewed flights to the Moon with the Artemis program. 27)

- The booster segments arrived by train at the Florida spaceport in June from Northrop Grumman’s manufacturing facility in Utah to undergo final launch preparations. Stacking operations began Nov. 19 with engineers transporting a booster segment from the Rotation, Processing and Surge Facility to the 525-foot-tall Vehicle Assembly Building (VAB).
- Each booster consists of five segments and will provide 7 million pounds of thrust for the liftoff from Launch Pad 39B. When assembled, each booster will be about half the length of a football field, and together they will generate more thrust than 14 four-engine jumbo commercial airliners. Once stacked, the SLS rocket will stand taller than the Statue of Liberty and have about 15% more thrust at liftoff than the Apollo program Saturn V rocket, making it the most powerful rocket ever built.
- “Stacking the first piece of the SLS rocket on the mobile launcher marks a major milestone for the Artemis Program,” said Andrew Shroble, an integrated operations flow manager with Jacobs. “It shows the mission is truly taking shape and will soon head to the launch pad.”
- The solid rocket boosters are the first components of the SLS rocket to be stacked and will help support the remaining rocket pieces and the Orion spacecraft. Over the next several weeks, workers will use an overhead crane that can hold up to 325 tons (the weight of about 50 elephants), to lift the remaining segments one by one and place them carefully onto the 380-foot-tall mobile launcher, the structure used to process, assemble, and launch the SLS rocket. The cranes are precise enough to lower an object onto an egg without cracking it.
- The first booster segments to be stacked are the bottom sections known as the aft assemblies. These house the system that controls 70% of the steering during initial ascent of the rocket. This section includes the aft motor segment and skirt, and the nozzle that directs the hot gas leaving the motor. After stacking the other four segments, the final pieces of the boosters are the forward assemblies, which include the nose cone that serves as the aerodynamic leading edge of the boosters. The forward assemblies will attach to the core stage when it arrives next year.
- Under the Artemis program, NASA aims to land the first woman and the next man on the Moon in 2024 and establish sustainable lunar exploration by the end of the decade. SLS and Orion, along with the human landing system and the Gateway in orbit around the Moon, are NASA’s backbone for deep space exploration.
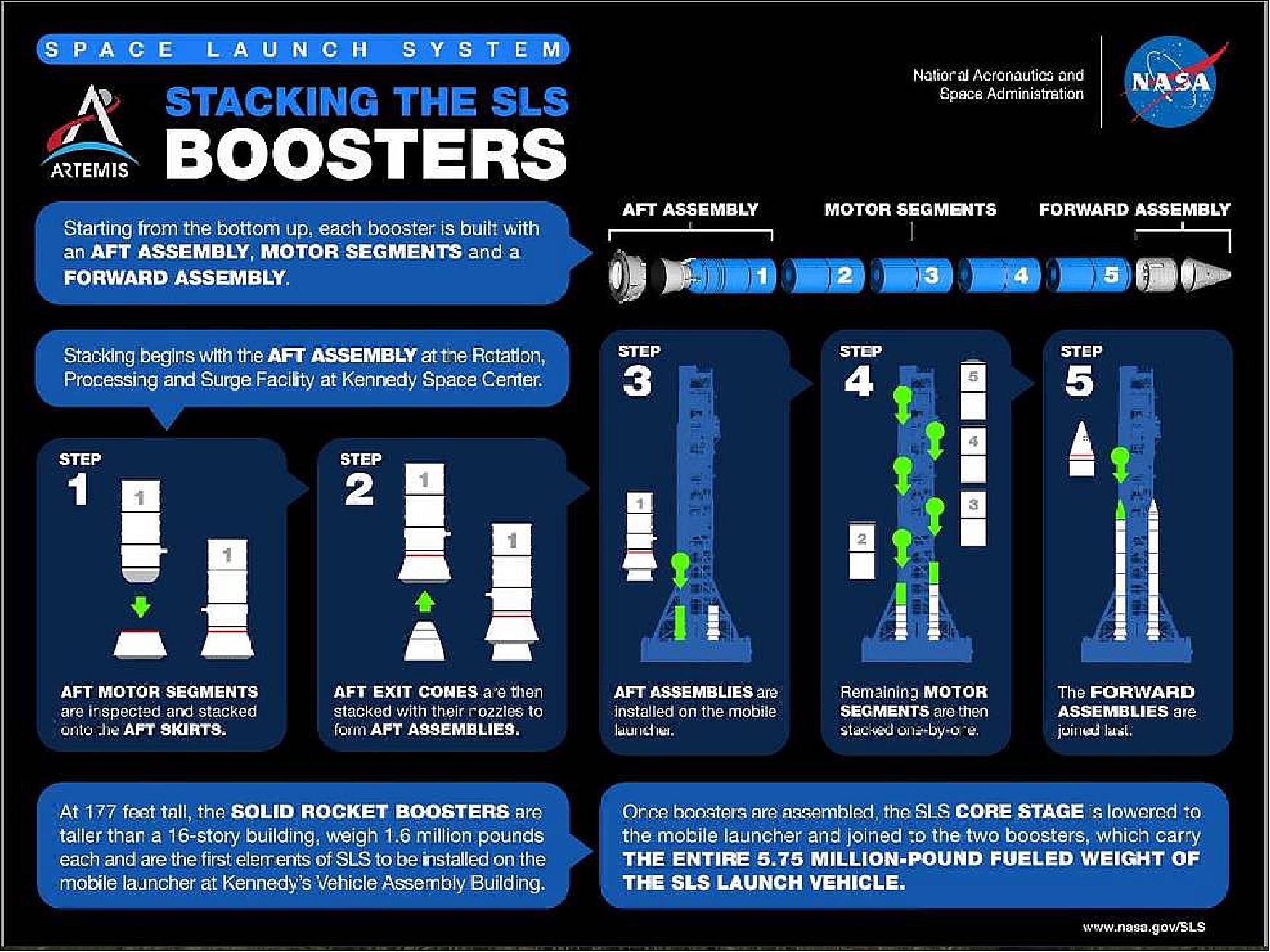
• November 6, 2020: Technicians have finished encapsulating the European Service Module for NASA’s Orion spacecraft that will travel around the Moon on the Artemis I mission. 28)

- The next time the ESM (European Service Module) will be visible it will be in space, when the four 7-m-long solar wings unfold to start generating power for the spacecraft. The three fairings are each around 4 m square, the size of a small room, after launch they will be blown away by small pyrotechnic explosions revealing the four solar panels and the European Service Module underneath.
- Above the European Service Module is the Crew Module where up to four astronauts will live and work on a typical two-week flight to the Moon and back. The first mission, Artemis I, will be uncrewed and is set to launch next year.
- With the spacecraft jettisonable adapters installed at NASA’s Kennedy Space Center in Florida, USA, the European Service Module will not be easily visible on Earth again, although technicians can access the module to service it and fill the tanks with fuel, helium, nitrogen and ammonia for the cooling system and other consumables.
- The final assembly activities for the spacecraft include installation of the forward bay cover, which protects the upper part of Orion including its parachutes throughout its mission, final adjustments of the main parachutes, securing and testing of electrical connections, along with closure and latching of the side hatch.
- As each area of the spacecraft is closed out, it will undergo final inspections to complete production. The spacecraft will then begin its path to the pad, including stops along the way to be fuelled and integrated with its launch abort system and, ultimately, the SLS rocket for launch.
- In December the European Service Module will be officially handed over to NASA’s launch preparation teams with ESA in a supporting role for Exploration Ground Support, during the mission and for post-flight analysis. ESA will no longer be responsible for the hardware as the spacecraft heads into final preparations for launch – a milestone for the hundreds of people involved who worked securely and tirelessly to make humankinds next-generation exploration vessel.
- Meanwhile in Bremen, Germany, work is progressing smoothly on the second and third European Service Modules that will send astronauts around and to the Moon. Technicians are currently installing the four propellant tanks for the European Service Module for Artemis II.
• October 8, 2020: On our journey forward to the Moon and on to Mars, NASA must test our technologies and capabilities to ensure astronaut safety. The Artemis I mission will be an uncrewed flight test of the Orion spacecraft that places a human-rated crew vehicle in lunar orbit for the first time since the Apollo missions of the 1960s and 70s. The mission will showcase the capabilities of both Orion and the Space Launch System (SLS), NASA’s powerful new rocket, which will launch Artemis missions from Kennedy Space Center in Florida. 29)
- Artemis I will demonstrate NASA’s networks’ comprehensive services for journeys to lunar orbit. The mission requires all three of NASA’s major networks to work in tandem, providing different communications and tracking service levels as Orion leaves Earth, orbits the Moon, and returns safely home.
- Communications services allow flight controllers in mission control centers to send commands to the spacecraft and receive data from Orion and SLS systems. Tracking, or navigation, services enable the flight controllers to see where the spacecraft are along their trajectory through space.
NASA’s Near Earth Network (NEN)
- Based out of NASA’s Goddard Space Flight Center in Greenbelt, Maryland, NASA’s Near Earth Network (NEN) consists of ground stations worldwide that provide direct-to-ground communications and navigation services. NEN stations will provide communications and navigation services during launch and navigation services at various points on Artemis I’s journey to the Moon.
- The NEN’s Launch Communications Segment (LCS) will provide critical links to both Orion and SLS during prelaunch and launch of Artemis I. Three ground stations along Florida’s space coast comprise LCS, which was designed to meet the specific needs of the SLS launch vehicle and will grow to support other missions after Artemis I.
- Specifically, the first two stations along the rocket’s flight path will provide uplink and downlink communications between the rocket and mission controllers. In the final phases of ascent, the third station will downlink high rate telemetry and video from SLS while Orion connects to the satellites in NASA’s Space Network.
- Despite the name suggesting the network’s services are limited to “near Earth,” the NEN’s navigation services extend to Orion’s journey from low-Earth orbit to the Moon and back through ground stations in Santiago, Chile, and Hartebeesthoek, South Africa.
- These NEN stations will support navigation data before and after the outbound trajectory correction burns that ensure the spacecraft stays on a path towards the Moon. The NEN will also provide navigation services during Orion’s outbound powered flyby burn that occurs at the mission’s closest approach to the Moon, setting the stage for final insertion into lunar orbit.
- For Orion’s return from the Moon, the NEN will provide navigation data for departure from lunar orbit and the return power fly-by burn that will place Orion on a course back for Earth, during which the NEN will also provide navigation services.
NASA’s Space Network (SN)
- NASA’s Space Network, also based at Goddard, can provide near-continuous communications services to spacecraft through a constellation of Tracking and Data Relay Satellites (TDRS). Located about 22,000 miles above Earth, TDRS relay data from spacecraft at lower altitudes to ground antennas. The Space Network will play a critical role during launch and low-Earth orbit phases of the Artemis I mission.
- Beginning at the launchpad, the Space Network will maintain a connection with Orion and the Interim Cryogenic Propulsion Stage (ICPS). ICPS provides the power to accelerate the spacecraft fast enough to overcome the pull of Earth’s gravity and set in on a precise trajectory to the Moon. The Space Network will continue service until Orion and ICPS leave TDRS coverage, when NASA’s Deep Space Network (DSN) takes over.
- On Orion’s return to Earth, the Space Network will facilitate communications from the final return trajectory correction burn through splashdown in the Pacific Ocean and recovery of the capsule. The return trajectory correction burn ensures Orion enters the atmosphere at just the right moment, allowing NASA to land the craft safely.
NASA’s Deep Space Network
- After handover from the Space Network, the DSN, managed by NASA’s Jet Propulsion Laboratory in Southern California, will handle communications for Artemis I beyond low-Earth orbit. This includes the mission’s outbound trajectory corrections, outbound powered flyby, return powered flyby burns, and return trajectory corrections while the NEN provides supplemental navigation data.
- The NEN and DSN tag team navigation for Orion so that engineers can employ a technique called three-way Doppler tracking. Using this method — with two ground stations on Earth in contact with Orion simultaneously, one each from NEN and DSN — NASA can triangulate Orion’s location relative to the ground stations.
- At the Moon, DSN will enable insertion into distant retrograde orbit (DRO). DRO is a highly stable orbit in which Orion travels retrograde, or opposite, from the direction the Moon travels around Earth. The DSN will maintain communications with Orion while in DRO and during the burns for DRO departure, return power fly-by, return transit and the final return trajectory correction burn, with assistance from the Space Network.
- The DSN will also help facilitate communications for all three of the mission’s CubeSat deployment stops. The CubeSats are small satellites that will be deployed along Orion’s trajectory to provide additional research opportunities for scientists and engineers. After deployment, many of the CubeSats will also communicate through the DSN.
- The networks supporting Artemis receive programmatic oversight from NASA’s Space Communications and Navigation (SCaN) program office. In addition to providing communications services to missions, SCaN develops the technologies and capabilities that will help propel NASA to the Moon, Mars and beyond.
• October 1, 2020: The new ESA logo and NASA’s ‘worm’ logo will be along for the ride on the first full mission of the powerful Space Launch System (SLS) rocket and Orion spacecraft. Teams at NASA’s Kennedy Space Center in Florida, USA, have started to apply the historic logos on the Artemis I rocket and spacecraft. 30)
• September 22, 2020: Already integrated and tested with the first European Service Module that will power and propel the craft and the Crew Module, Orion has now been fitted with the adaptor cone that will connect it to the Space Launch Systems (SLS) rocket. This is one of the final major hardware checkouts before being integrated with SLS for the Artemis I launch to the Moon next year. 31)
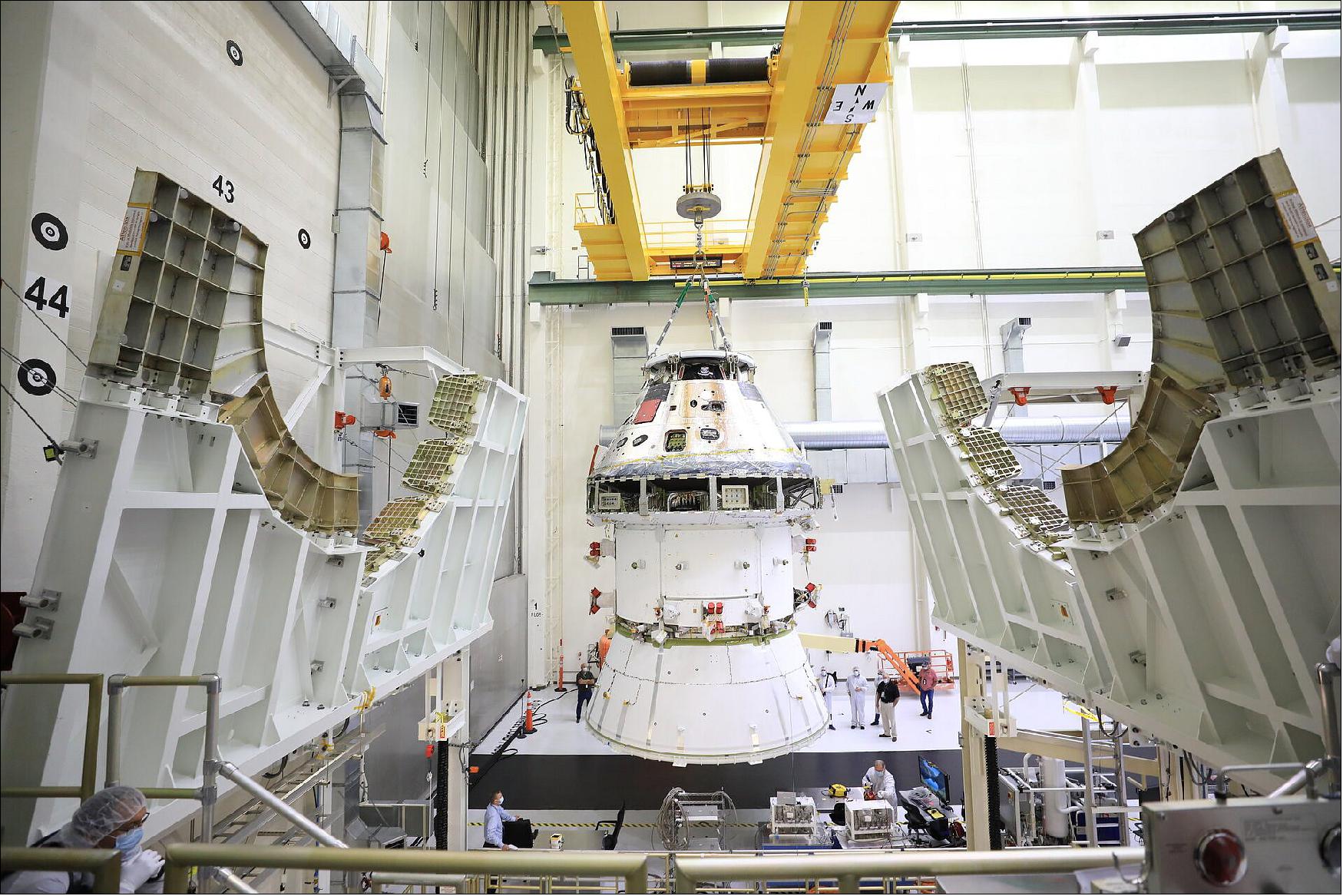
- Earlier this month at NASA’s Kennedy, the last solar wing for Orion was unfolded, tested and folded for launch. This week, the four solar arrays will be connected to the main structure.
- Each 7 m wing are hinged at two points so they can be folded to fit inside the fairing of the SLS rocket. After launch and in Earth orbit the four wings unfold to span 19 m and swivel and rotate to collect solar energy, turning it into electricity for the spacecraft’s systems.
- Needless to say, all teams involved – NASA, ESA and the 16 companies in ten European countries supplying the components that make up humankind’s next generation spacecraft for exploration – are over the Moon.
• September 1, 2020: NASA’s Orion Program has completed the System Acceptance Review and Design Certification Review to certify the Artemis I spacecraft is fit for flight, ready to venture from Earth to the lunar vicinity, and return home for landing and recovery. 32)
- The review examined every spacecraft system, all test data, inspection reports, and analyses that support verification, to ensure every aspect of the spacecraft has the right technical maturity.
- In effect, the review gives the stamp of approval to the entire spacecraft development effort and is the final formal milestone to pass before integration with the Space Launch System rocket.
- In addition to spacecraft design, the review certified all reliability and safety analyses, production quality and configuration management systems, and operations manuals.
- Orion, the Space Launch System, and Exploration Ground Systems programs are foundational elements of the Artemis program, beginning with Artemis I, the first integrated flight test of Orion and SLS next year. Artemis II will follow as the first human mission, taking astronauts farther into space than ever before.
• August 14, 2020: Technicians at NASA’s Kennedy Space Center in Florida are working to install an adapter that will connect the Orion spacecraft to its rocket for the Artemis I mission around the Moon. This is one of the final major hardware operations for Orion prior to integration with the Space Launch System (SLS) rocket. 33) 34)

- Orion is NASA’s next exploration spacecraft to transport astronauts to the vicinity of the Moon and to the Gateway orbiting the Moon. The spacecraft will hold four people and send them farther than any humans have travelled from Earth.
- ESA is supplying the European Service Module for Orion, in an arrangement that stems from the International Space Station partnership. Based on ESA’s proven Automated Transfer Vehicles for supplying the Space Station, the module will provide everything to keep the astronauts alive, including oxygen, water, thermal control, electricity and propulsion.
• July 30, 2020: The second to last piece of hardware for the Artemis I test flight around the Moon has arrived at the agency’s Kennedy Space Center in Florida. The launch vehicle stage adapter (LVSA) connects the core stage of NASA’s Space Launch System (SLS) rocket to the upper stage, called the Interim Cryogenic Propulsion Stage. The cone-shaped connector also helps protect the RL10 engine housed in the upper stage, which will provide the power necessary to leave Earth’s orbit and send the Orion spacecraft on its journey to the Moon. 35)

- “The launch vehicle stage adapter arriving to Kennedy is significant because we have almost all of the pieces of the rocket here as we get closer to launch,” said Allison Mjoen, operations project engineer with the Exploration Ground Systems program. “We have moved from planning into implementation, and soon the rocket will begin taking shape with stacking operations.”
- Arriving at Kennedy’s Launch Complex 39 turn basin wharf, the LVSA traveled from NASA’s Marshall Space Flight Center in Huntsville, Alabama, to Florida on the agency’s Pegasus barge – a 310-foot-long vessel that has been modified to transport the largest rocket stage in the world: the SLS core stage. Technicians offloaded the LVSA and transported it to the Vehicle Assembly Building, where it will be stored until it is needed for stacking on the rocket. The core stage – made up of the forward skirt, liquid oxygen tank, liquid hydrogen tank, and the engine section containing the rocket’s four RS-25 engines – is the final piece of the rocket that will be delivered to Kennedy ahead of the Artemis I launch.

- Under the Artemis program, NASA is working toward landing the first woman and the next man on the Moon by 2024. Artemis I will test SLS and Orion as an integrated system prior to crewed flights and is the first in a series of increasingly complex missions that will enable human exploration to the Moon and Mars. SLS and Orion, coupled with the Human Landing System and the Gateway in orbit around the Moon, will be the agency’s backbone of deep space exploration.
• June 16, 2020: The rocket booster segments that will help power NASA’s first Artemis flight test mission around the Moon arrived at the agency’s Kennedy Space Center in Florida on Monday for launch preparations. 36)
- All 10 segments for the inaugural flight of NASA’s first Space Launch System (SLS) rocket and Orion spacecraft were shipped by train from Promontory, Utah. The 10-day, cross-country journey is an important milestone toward the first launch for NASA’s Artemis program.

- “The arrival of the booster segments at Kennedy is just the beginning of the SLS rocket’s journey to the pad and onward to send the Orion spacecraft to the Moon,“ said NASA Administrator Jim Bridenstine. “Artemis I will pave the way toward landing the first woman and the next man on the surface of the Moon in 2024 and expanding human exploration to Mars.”
- Each rocket booster has individual motor segments, located between the forward assemblies and aft skirts, making up the largest single component of the entire booster. The two SLS rocket boosters, four RS-25 engines, and core stage, produce a combined total of more than 8.8 million pounds of thrust power during launch.
- “It’s an exciting time at NASA’s Kennedy Space Center as we welcome Artemis flight hardware and continue working toward the Artemis I launch,” said Kennedy Space Center Director Bob Cabana.
- Each booster segment, weighing 180 tons, is filled with propellant and outfitted with key flight instrumentation. Due to their weight, Northrop Grumman, which is the booster lead contractor, transported the segments in specially outfitted railcars to make the 2,800-mile trip across eight states to Florida’s Space Coast.
- “The fully assembled boosters for NASA’s Space Launch System rocket are the largest, most powerful solid propellant boosters ever built for flight,” said Bruce Tiller, manager of the SLS Boosters Office at NASA’s Marshall Space Flight Center in Huntsville, Alabama. “These enormous rocket motors help provide the necessary launch power for the SLS deep space rocket.”
- Now that the booster segments are at Kennedy, NASA’s Exploration Ground Systems team will prepare them for assembly and integration activities that start with offloading the segments. Teams will attach the aft segments to the aft skirts and offload and store the remaining segments from the railcars in preparation for stacking.
- “It is good to see booster segments rolling into the Kennedy Space Center,” said Mike Bolger, program manager of Exploration Ground Systems. “The team can’t wait to get started working on the boosters that will send the SLS rocket and Orion spacecraft on the first Artemis mission to the Moon.”
- The solid rocket boosters are the first elements of the SLS rocket to be installed on the mobile launcher in preparation for launch. The aft booster assemblies will be lifted on to the mobile launcher, followed by the remaining booster segments, and then topped with the forward assembly.
- Teams at Kennedy have been preparing for the arrival of the booster segments by assembling and testing the aft skirts and forward assemblies of the boosters, and practicing stacking procedures with booster pathfinders, or hardware replicas, earlier this year. NASA and Northrop Grumman completed casting in 2019 of all 10 of the motor segments for both the first and second Artemis lunar missions, and are now working on the boosters for the Artemis III mission, which will land the first woman and next man on the Moon in 2024.
- With the arrival of the boosters, the only remaining pieces of hardware for the Artemis I flight test to be delivered to Kennedy are the launch vehicle stage adapter, which connects the rocket to the Orion spacecraft and will arrive this summer, and the SLS core stage, which will be transported to Kennedy by barge after the Green Run hot fire test later this year at NASA’s Stennis Space Center near Bay St. Louis, Mississippi.
- Through the Artemis program, NASA will return astronauts to the Moon’s surface in four years. SLS, along with NASA’s Orion spacecraft, the Human Landing System and the Gateway in orbit around the Moon, will serve as NASA’s backbone for deep space exploration. SLS is the only rocket that can send Orion, astronauts, and supplies to the Moon on a single mission. We’ll explore more of the lunar surface than ever before, and collaborate with our commercial and international partners to establish sustainable exploration by the end of the decade. Then, we will use what we learn on and around the Moon to take the next giant leap – sending astronauts to Mars.

• April 23, 2020: Before NASA’s mighty Space Launch System (SLS) rocket can blast off from the agency’s Kennedy Space Center to send the Orion spacecraft into lunar orbit, teams across the country conduct extensive testing on all parts of the system. Guiding that effort at the Florida spaceport are NASA Test Directors (NTDs).

- NTDs within the Exploration Ground Systems program are in charge of flight and ground hardware testing in Kennedy’s Launch Control Center firing rooms 1 and 2, where activities involved with preparing rockets, spacecraft and payloads for space can be controlled from computer terminals. They are responsible for emergency management actions, helping lead the launch team during all facets of testing, launch and recovery.
- NASA’s Artemis missions will land American astronauts on the Moon by 2024, beginning with Artemis I, the uncrewed flight test of SLS and Orion.
- “It’s certainly an amazing feeling to be responsible for setting up the building blocks of a new program which will eventually take us to the Moon, Mars and beyond,” said Senior NASA Test Director Danny Zeno.
- Zeno is leading the development of test plans and procedures that are essential to flight and ground hardware for the Artemis missions. This includes proving the functionality of flight and ground systems for the assembled launch vehicle configuration, verifying the mobile launcher arms and umbilicals operate as expected at launch, and performing a simulated launch countdown with the integrated vehicle in the Vehicle Assembly Building.
- The 14-year NTD veteran relishes his hands-on role in successfully testing and launching SLS — the most powerful rocket NASA has ever built.
- “It’s very fulfilling,” Zeno said. “What excites me about the future is that the work I’m doing today is contributing to someday having humans living and working on other planets.”
- There are 18 people in the NTD office — all of whom must undergo rigorous certification training in the management and leadership of test operations, systems engineering and emergency response. They are in charge of the people, hardware and schedule during active firing room testing.
- “The NTD office is at the center of testing operations, which will ensure that we are ready to fly the Artemis missions,” said Launch Director Charlie Blackwell-Thompson. “As we lay the foundation for exploring our solar system, the NASA test directors are on the front lines of making it happen.”
- An NTD works from a console in the firing room during integrated or hazardous testing, guiding the team through any contingency or emergency operations. They lead critical testing on Launch Pad 39B and the, the 370-foot-tall, 11 million-pound steel structure that will launch the SLS rocket and Orion spacecraft on Artemis missions to the Moon and on to Mars. This includes sound suppression, fire suppression and cryogenic fluid flow tests, as well as testing the crew access arm and umbilicals — connections that will provide communications, coolant and fuel up until launch.
- While the majority of work for the ground and flight systems is pre-liftoff, the job certainly doesn’t end there.
- “It culminates in a two-day launch countdown in which all of the groups, teams and assets are required to function together in an almost flawless performance to get us to launch,” said Senior NASA Test Director Jeff Spaulding.
- Spaulding has nearly three decades of experience in the Test, Launch and Recovery Office. For Artemis I, he is leading the launch control team and support teams during the launch countdown for Blackwell-Thompson, who will oversee the countdown and liftoff of SLS.
- Just over three miles from the launch pad, on launch day, Spaulding will be in the firing room running the final portion of cryogenic loading through launch. During this time, supercool propellants — called cryogenics — are loaded into the vehicle's tanks. He will perform the same tasks for the wet dress rehearsal, which is a full practice countdown about two months before launch that includes fueling the tanks and replicating everything done for launch prior to main engine start.
- At the end of the mission, part of the team will lead the recovery efforts aboard a Navy vessel after Orion splashdown. The NASA recovery director and supporting NTDs are responsible for planning and carrying out all operations to recover the Orion capsule onto a U.S. Navy ship. This includes working closely with the Department of Defense to ensure that teams coordinate recovery plans, meet requirements, and follow timelines and procedures to bring our heroes and spacecraft home quickly and safely.
- “We are supported by numerous teams at Kennedy and elsewhere around the country that are helping us with our historic first flight as we blaze a path toward landing astronauts on the Moon in 2024,” Spaulding said.
• March 27, 2020: The Orion spacecraft that will fly on the Artemis I mission around the Moon has returned to NASA’s Kennedy Space Center in Florida, USA, after finishing space environment tests. The spacecraft, including ESA’s European Service Module, is now at its final destination before launch. 37) 38)
- Orion spent four months at NASA’s Plum Brook station where it was subjected to the vacuum and temperatures of –175°C to 75°C it will experience on its flight to the Moon. After proving its space-worthiness, the electronics - including the thousands of parameters and functions of the European Service Module that control the engines, electrical power and steering the solar panels to face the Sun - were checked for electromagnetic interference.
- ESA’s Dominique Siruguet from the European Service Module integration and verification team says “The tests were successful and the behavior of the vehicle was good, passing all requirements.”
- Plum Brook station was chosen for the tests because thermal vacuum and electromagnetic compatibility could be performed in the same facility. This avoided additional transport of Orion, which is the size of a two-story house.
- Having passed its trials, the spacecraft was wrapped and moved by truck to an airport in Ohio for its return flight on NASA’s Super Guppy aircraft.

Adding Wings to Orion
- The tests are not completely over for Orion, at Kennedy Space Center the crew module will be further prepared and more leak tests conducted. The European Service Module has tanks for fuel, oxygen and water that are critical for the astronauts. The gas tanks are pressurized and are connected to many pipes and valves, so it vital to make sure there are no leaks.
- The solar wings that generate power during its mission will be installed, as well as protective covers called the Spacecraft Adapter Jettisoned fairings for the intense moments of launch on the world’s most powerful rocket.
- Later this year ESA will formally transfer ownership of the European Service Module to NASA and the spacecraft will move into the ground system phase where it will be united with the SLS rocket for a lift-off to the Moon.
- Orion is a key component of Artemis I — an uncrewed test flight around the Moon that paves the way for the Artemis III mission, which will land the first woman and next man on the lunar surface by 2024. ESA is designing and supplying the European Service Module for the Orion spacecraft. This provides electricity, water, oxygen and nitrogen. It also keeps the spacecraft at the right temperature and on course, propelling it to the Moon and back once it has separated from the launcher.
• March 20, 2020: The following is a statement from NASA Administrator Jim Bridenstine: “NASA leadership is determined to make the health and safety of its workforce its top priority as we navigate the coronavirus (COVID-19) situation. To that end, the agency’s Michoud Assembly Facility and Stennis Space Center are moving to Stage 4 of the NASA Response Framework, effective Friday, March 20. 39)
- “The change at Stennis was made due to the rising number of COVID-19 cases in the community around the center, the number of self-isolation cases within our workforce there, and one confirmed case among our Stennis team. While there are no confirmed cases at Michoud, the facility is moving to Stage 4 due to the rising number of COVID-19 cases in the local area, in accordance with local and federal guidelines.
- “Mandatory telework is in effect for NASA personnel at both facilities until further notice. Additionally, all travel is suspended. These measures are being taken to help slow the transmission of COVID-19 and protect our communities.
- “Access to Stennis and Michoud will be limited to personnel required to maintain the safety and security of the center, as approved by agency leadership and the resident agencies. All previously approved exceptions for onsite work are rescinded and new approvals will be required in order to gain access to the center.
- “NASA will temporarily suspend production and testing of Space Launch System and Orion hardware. The NASA and contractors teams will complete an orderly shutdown that puts all hardware in a safe condition until work can resume. Once this is complete, personnel allowed onsite will be limited to those needed to protect life and critical infrastructure.
- “We realize there will be impacts to NASA missions, but as our teams work to analyze the full picture and reduce risks we understand that our top priority is the health and safety of the NASA workforce.
- “I ask all members of the NASA workforce to stay in close contact with your supervisor and check the NASA People website regularly for updates. Also, in these difficult times, do not hesitate to reach out to the NASA Employee Assistance Program, if needed.
- “I will continue to say, so none of us forget – there is no team better prepared for doing hard things. Take care of yourself, your family, and your NASA team.”
• March 16, 2020: The first Orion spacecraft that will fly around the Moon as part of Artemis to return humans to the lunar surface has finished its space-environment tests at NASA’s Plum Brook Station in Ohio, USA. The vehicle – that can transport up to four astronauts – consists of the European Service Module, the Crew Module and connecting adapter and all elements have now been given the stamp of approval for spaceflight after being subjected to the vacuum, extreme temperatures and electromagnetic interference it will encounter during its trip to the Moon. 40)
- Orion arrived at Plum Brook Station – the only center large enough to test the spacecraft – on 26 November and passed two months of thermal-vacuum tests subjecting the spacecraft to temperatures ranging from –175°C to 75°C in vacuum.
- After passing the trial by temperature, Orion went through electromagnetic interference testing to ensure the electronics worked well together – the European Service Module has over 11 km over wiring to gather information and send commands to its 31 engines, propellant tanks, solar wings and more.
- Orion will now ship to NASA’s Kennedy Space Center where it will be further prepared for launch, including assembling the solar panels and more individual tests.

• March 3, 2020: Radio frequency testing has begun on the first Orion spacecraft that will fly around the Moon for the Artemis I mission, just two weeks after thermal and environmental tests were completed at NASA’s Plum Brook Station in Ohio, USA. 41)
- EMC (Electromagnetic Compatibility) testing is routine for spacecraft. All electronics emit some form of electromagnetic waves that can cause interference with other devices. Think of the buzz that speakers give out right before an incoming call on a mobile phone.
- Spacecraft electronics can cause similar interference, but out in space such interference can have disastrous consequences, so all systems must be checked before launch.
- EMC tests often take place in a special shielded room constructed of metal walls and doors and foamy spikes (aka Absorbers) that block out unwanted external electromagnetic radiation, like ESA’s Maxwell chamber at its technical site in the Netherlands.
- Though not an EMC chamber, Plum Brook’s thermal vacuum chamber is made of aluminum that does provide electromagnetic shielding, making it a suitable substitute.
- To test electronics, the spacecraft will simulate a flight in realistic conditions with most of its subsystems and equipment powered and in operational mode.
- The electronics are first tested for compatibility in this electromagnetic shielded chamber. Equipment will be switched on to test whether they do potentially disturb one another.
- In the second round of tests, electromagnetic fields will be applied using antennas around the spacecraft to test the susceptibility to interference from external sources. The Orion capsule is equipped with electromagnetic field sensors to take measurements as the disturbance frequencies are injected into the chamber.
- While all subsystems are a potential source of radio frequency noise, of particular interest are the transmitters that intentionally generate radio frequencies. These can easily disturb other equipment sensitive to electromagnetic noise, like GPS receivers, telecommand modules and other communication elements.
- Orion’s European Service Module provides power, propulsion, and crew life support.
- ESA experts are on site monitoring all tests alongside NASA colleagues as Orion moves closer to its first flight without a crew around the Moon.
• January 14, 2020: The first flight of the Artemis program, Artemis I, is scheduled to begin soon. The lunar spacecraft consists of NASA's Orion crew module and the ESM (European Service Module). Developed by ESA and building on technology from its ATV (Automated Transfer Vehicle), the ESM will provide propulsion, life support, environmental control and electrical power to Orion. The Artemis I spacecraft modules are undergoing thermal vacuum and electromagnetic interference tests in the world's largest space simulation vacuum chamber at the Glenn Research Center's Plum Brook Station in Sandusky, Ohio, USA. 42)
Figure 47: Back to the Moon with ESA (video credit: ESA)
• January 13, 2020: NASA’s Kennedy Space Center in Florida will have a busy year preparing facilities, ground support equipment and space hardware for the launch of Artemis I, the first uncrewed launch of the Space Launch System (SLS) rocket and the Orion spacecraft. In 2020, Exploration Ground Systems (EGS) activities will ramp up as launch hardware arrives and teams put systems in place for Artemis I and -2 missions. 43)
Launch Countdown Simulation Activities
Launch countdown simulations will continue to ramp up in 2020 to train and certify the launch control team for Artemis missions. The types of simulations will build on one another and will walk through the final portions of the launch countdown sequence, called the terminal countdown. Integrated simulations will tie in all NASA centers working the mission to ensure all members of the team are ready to work together, including Mission Control at Johnson Space Center in Houston, and the SLS Engineering Support Center at Marshall Space Flight Center in Alabama. Simulations will begin at the end of January and will occur up through one week before launch, with an average of one training exercise each month.
Vehicle Assembly Building
Much of the work in 2020 will be to complete a punch list of detail work inside the VAB (Vehicle Assembly Building). This includes cleaning the platforms and making minor repairs to any platform hardware that will be near flight hardware as the facility prepares for arrival of SLS components and stacking operations.
“We are at a very significant point in NASA’s Artemis mission,” said Mike Bolger, program manager of EGS. “The EGS team has finished mobile launcher testing at the launch pad and will finish testing at the VAB in January. At that point, all of the launch infrastructure will be tested and ready for operations.”
Launch Complex 39B
Teams will continue work on a new emergency egress system for Pad 39B where flight or ground crew could board a basket with a braking system at the crew access level of the mobile launcher. The crew would ride the basket down a cable and come to a stop near a bunker to the west of the pad surface, providing quick escape in the unlikely event of an emergency. The design phase began in 2019 and construction will be complete in time to support crewed Artemis missions.
The pad is currently getting a liquid hydrogen upgrade. The project involves the integration of a new 1.4 million gallon, liquid hydrogen (LH2) storage sphere into the existing Launch Complex 39B system. The new LH2 sphere will work with the current LH2 sphere to supply LH2 for Artemis II and beyond. The larger tank will allow NASA to attempt SLS launches on three consecutive days, instead of opportunities two out of three days, in the event of a scrub. The newer technology reduces liquid hydrogen burn-off, allowing more launch attempts before having to refill the larger tank. Construction began in 2019 and will be complete prior to Artemis II.
Orion Underway Recovery Test 8
The integrated recovery team of NASA, EGS, Lockheed Martin and the U.S. Navy, along with additional contractor support, will head out to sea off the coast of California in March to conduct the eighth Underway Recovery Test. Using a Navy ship with a well deck and several small boats, the primary objective is to validate Orion recovery operations for Artemis I — including procedures and timelines, and practicing different scenarios.
Orion Spacecraft
This spring, the Orion spacecraft for Artemis I will return from NASA’s unique test facility at Plum Brook Station in Ohio, where it is currently undergoing environmental testing inside the vacuum chamber that simulates the harsh environment of space. Inside the Neil Armstrong Operations and Checkout (O&C) Building at Kennedy, technicians will install the spacecraft’s solar array wings before performing final checkouts. EGS will begin Orion ground processing and stacking activities later in the year. The team will process and fuel Orion in the Multi-Purpose Processing Facility then transfer it over to the Launch Abort System Facility where engineers will attach the launch abort system. Orion will then roll out to the VAB for inspections before stacking Orion on top of the SLS rocket.
In its early processing stages, the Artemis II crew module milestones inside the O&C include propulsion tank installation, a pressure test and subsystems installations in the spring. The initial power-on of the crew module will occur in early fall. The heat shield that will protect the first crewed mission of Orion will be completed and installed by the end of the year. Processing and testing of the crew module adapter – the ring that connects to the European Service Module – for Artemis II will happen in the first half of the year prior to the arrival of the European Service Module in the fall.
SLS (Space Launch System)
Training activities with pathfinders, or full-scale replicas, of the SLS core stage and booster segments occurred in 2019, and more training with various pathfinder segments and hardware will continue. In 2020, training will involve stacking inert booster segments on the mobile launcher in the VAB.
Hardware for SLS will continue to arrive for processing and integration in various Kennedy facilities. This year all ten of the solid propellant booster segments will arrive by train from their Northrop Grumman manufacturing facility in Promontory, Utah. The launch vehicle stage adapter, which will connect the SLS core stage to the interim cryogenic propulsion stage, will arrive by barge. The booster aft skirts – which contain the thrust vector control system that steers the rocket – will trek from the Booster Fabrication Facility to the Rotation, Processing and Surge Facility where they will be attached to the aft exit cones. The exit cones are attached to the bottommost part of each of the twin boosters to provide extra thrust to the boosters and protect the aft skirts from the thermal environment during launch.
The core stage of the SLS rocket will undergo a Green Run test campaign over several months in the B-2 test stand at the agency’s Stennis Space Center in Mississippi. Following Green Run completion, the 225,000-pound core stage will leave Stennis and arrive at Kennedy on the Pegasus barge. The core stage and solid rocket boosters will then be integrated inside the VAB.
Mobile Launcher 2
In 2019, NASA awarded a contract for Mobile Launcher 2 to Bechtel National Inc. of Reston, Virginia. The ground structure that will be used to assemble, process and launch the second and more powerful configuration of the SLS rocket, called Block 1B, is in its early stages of design and development and will be ready for Artemis-4.
Artemis I will be the first in a series of increasingly challenging missions that will enable human exploration to the Moon and Mars. In 2020, the mission will truly begin to take shape as hardware arrives and stacking operations begin inside the VAB.
“The operations team is writing procedures, training, and preparing for flight hardware processing,” Bolger said. “When the SLS and Orion are turned over to EGS later this year, Kennedy will be ready!”
Future Artemis missions will establish a sustainable presence at the Moon for decades to come, and Kennedy teams will move forward in 2020 to build the infrastructure and make those missions possible.
• December 17, 2019: Europe will power the NASA spacecraft that take astronauts to a new international outpost and forward to the Moon, following decisions made by ESA Member States at Space19+ in Seville, Spain. 44)
- The decision by Member States show a strong commitment to progressing Europe’s exploration of the Solar System and will see ESA play a key role in Artemis missions by providing European Service Modules for Orion spacecraft three and four.
- The Orion spacecraft is built by NASA with ESA providing the service module. The arrangement stems from the international partnership for the International Space Station. NASA’s decision to cooperate with ESA on a critical element for the mission is a strong sign of trust and confidence in ESA’s capabilities.
- More than 20 companies around Europe are now building the European Service Module as NASA works on Orion and the Space Launch System.
- ESA is already providing the European Service Modules that will power missions one and two. The first Artemis mission will see Orion fly without astronauts around the Moon, with the second mission flying with astronauts on a direct return trajectory around the Moon.
- Under current Artemis planning, the third and fourth missions will see NASA’s Orion spacecraft bring astronauts to the Gateway and on to a landing on the lunar surface.
- The news confirms that humankind’s return to the Moon will be truly international, strengthening the collaboration between NASA and ESA on Orion, Artemis and much more.
- Space19+ results also give ESA mandate to start procuring ‘long-lead items’ that require more time to develop and build – allowing industrial partners to prepare early equipment needed for a fifth and sixth European Service Module.
- The first European Service Module is currently at NASA’s Plum Brook Station in Ohio, USA, coupled to the Crew Module and Service Module Adapter for thermal-vacuum and electromagnetic tests on the complete Orion spacecraft.
- The second European Service Module is being built in Bremen, Germany, by prime contractor Airbus. The structure is complete and technicians are working round the clock to complete the module, starting with integration of 11 km of wiring.
- NASA is committed to landing on the Moon by 2024 and Europe is now a trusted lunar partner, supplying the modules to propel Orion and support the astronauts with energy and consumables en route.
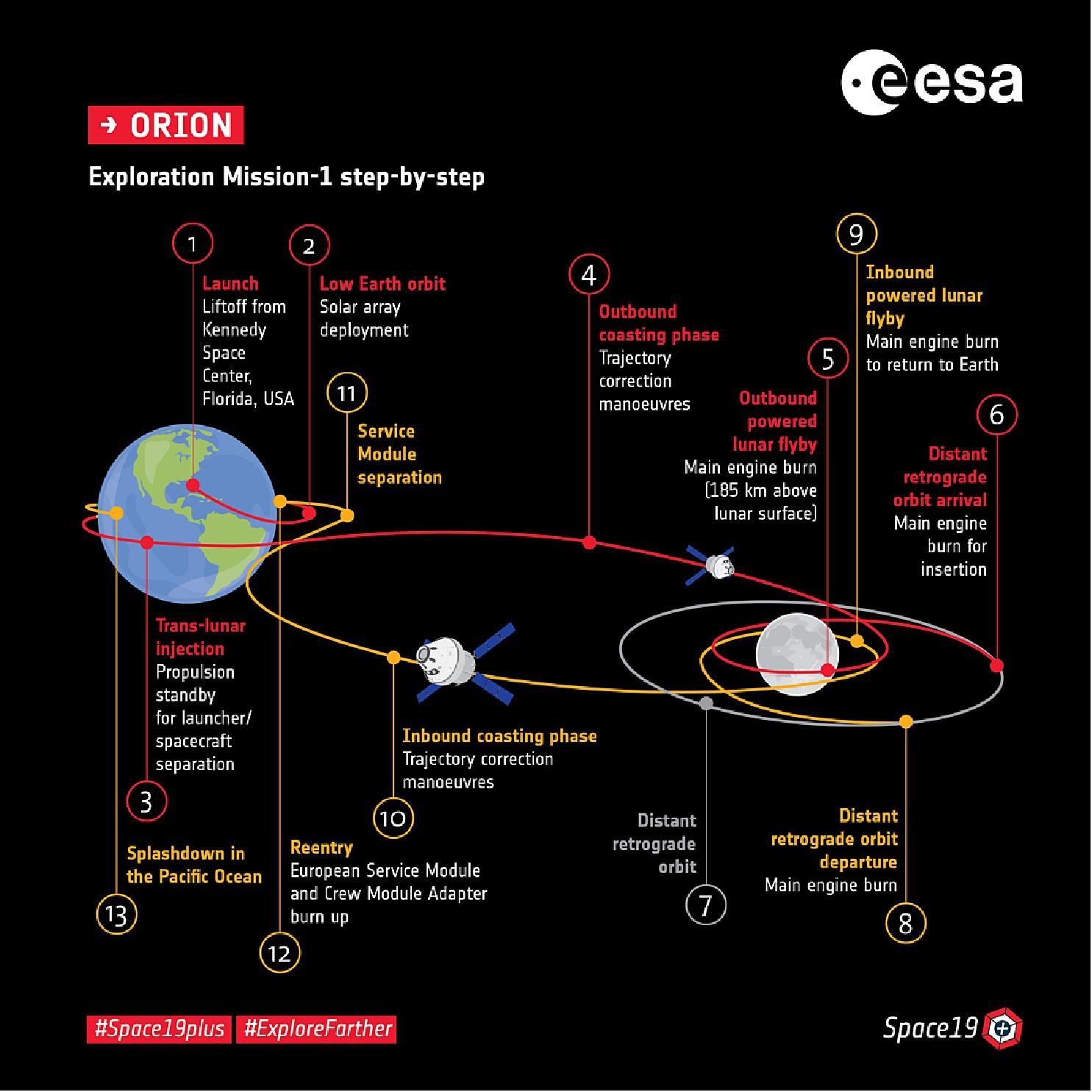
• December 4, 2019: Here at NASA’s Plum Brook Station in Ohio, USA, Orion is being put into a thermal cage in preparation of getting its first feel of space in the world’s largest thermal vacuum chamber. 45)

- Orion will be subjected to temperatures at Plum Brook ranging from –115°C to 75°C in vacuum for over two months non-stop – the same temperatures it will experience in direct sunlight or in the shadow of Earth or the Moon while flying in space.
- The tests that will be run over the next few months will show that the spacecraft works as planned and adheres to the strictest safety regulations for human spaceflight. The European Service Module has 33 thrusters, 11 km of electrical wiring, four propellant and two pressurization tanks that all work together to supply propulsion and everything needed to keep astronauts alive far from Earth – there is no room for error.
• November 27, 2019: Plum Brook Station is a remote test facility for the NASA Glenn Research Center in Cleveland, Ohio. Plum Brook is home to the world’s largest and most powerful space environment simulation facilities including the Space Simulation Vacuum Chamber. 46)
• November 26, 2019: The Artemis I Orion spacecraft arrived at NASA’s Plum Brook Station in Sandusky, Ohio, on Tuesday, Nov. 26 for in-space environmental testing in preparation for Artemis I. 47) 48)

- This four-month test campaign will subject the spacecraft, consisting of its crew module and European-built service module, to the vacuum, extreme temperatures and electromagnetic environment it will experience during the three-week journey around the Moon and back. The goal of testing is to confirm the spacecraft’s components and systems work properly under in-space conditions, while gathering data to ensure the spacecraft is fit for all subsequent Artemis missions to the Moon and beyond.
- “This is the final critical step before the spacecraft is ready to be joined with the Space Launch System rocket for this first test flight in 2020,” said Dr. Marla Pérez-Davis, acting director, NASA’s Glenn Research Center. “Our team at Plum Brook Station has been upgrading the Space Environments Complex to prepare for this test, and we are thrilled that it is here.”
- The spacecraft flew into Mansfield Lahm Airport aboard the agency’s Super Guppy from NASA’s Kennedy Space Center in Florida, where engineers and technicians recently completed assembly and integration of the crew capsule and service module. Transportation of the spacecraft is an involved process, bringing together teams from Glenn, Kennedy, NASA’s Johnson Space Center in Houston, Lockheed Martin, the Ohio Air National Guard, and the following local logistics companies: RPTS Express; Diamond Heavy Haul, Inc.; and Capital City Group, Inc.
- “This is an exciting day for our state, as it continues Ohio’s long line of history in our nation’s space exploration pursuits,” said U.S. Rep. Troy Balderson. “From the Wright brothers to the first man on the Moon—Neil Armstrong—to the Orion spacecraft, Ohio leads the United States in the aerospace industry and will continue to do so in the future.”
- After unloading Orion at the airport, the transportation team drove the spacecraft across Northeast Ohio’s new space corridor. NASA Glenn worked with the Ohio Department of Transportation and local utility companies to clear more than 700 overhead lines from the 41-mile stretch of rural highway between Mansfield and Plum Brook Station. The space corridor creates new opportunities for Ohio by enabling Plum Brook to conduct large-scale testing of agency and commercial spacecraft previously unachievable due to logistics challenges.
- “This next-generation Orion spacecraft is being tested at NASA Plum Brook because of our region’s world-class workforce and unrivaled experience in space exploration,” said U.S. Rep. Marcy Kaptur. “NASA Plum Brook has a long and storied history at the center of America’s leadership in space exploration. Congratulations to the scientists, engineers and technicians for the hard work that it took get us to this point. Today’s arrival culminates years of planning, coordination and construction. This momentous occasion is an important step on the path to a future manned mission to the Moon.”
- Artemis I is an uncrewed test flight around the Moon, the first in a series of progressively more complex missions that will land the first woman and next man on the lunar surface by 2024. NASA will then use what it learns on the Moon to prepare to send humans to Mars.
• November 22, 2019: The Orion crew and service module stack for Artemis I was lifted out of the Final Assembly and Test (FAST) cell on Monday, November 11. The spacecraft has been stationed in the FAST cell since July 2019 for mating and closeout processing. 49)
- After lifting out of the cell, Orion will be attached to a tool called a verticator that rotates the stack from its vertical configuration to a horizontal configuration for transport to NASA’s Plum Brook Station in Sandusky, Ohio, USA, where it will undergo full environmental testing to certify the complete vehicle for flight.
- Once the vehicle returns to NASA's Kennedy Space Center it will return to the FAST cell for installation of final panels left off for environmental testing purposes and the service module’s four solar arrays.

• October 23, 2019: ESA and NASA reaffirmed their interest in working with commercial service providers as well as international partners on missions to the Moon in a joint statement signed at the 70th annual International Astronautical Congress last week. 50)
- The statement supports the ‘Lunar Pathfinder’ mission, ESA’s first Moon partnership with European industry, addressing communication and navigation needs for future lunar exploration.
- The ‘Lunar Pathfinder’ partnership helps lay the foundation for providing communications, navigation, and operations services around the Moon. Its communications relay service is intended to link the Earth and the lunar surface.
- “We are working together to make the commercial lunar economy a reality,” says David Parker ESA’s Director of Human and Robotic Exploration. “We want to act as an anchor customer and institutional broker for gaining access to non-European markets. ESA supports a competitive ecosystem of European space providers.”
- Commercialization is gaining momentum in the space arena and both ESA and NASA confirmed their intention to work on lunar services with the UK Space Agency earlier this year.
- The move follows ESA’s collaboration agreement with UK partners Surrey Satellite Technology Ltd and Goonhilly Earth Station for support in lunar services, signed in April 2018.
- In the joint statement, NASA and ESA reiterated their interest to identify the elements of this potential cooperation and formalize an interagency agreement in the future.
- The two agencies have also committed to working together to supplement NASA’s own communications capabilities with those of ESA and its partners.
- NASA also confirmed its interest in having a variety of communication and navigation services to serve its robotic missions, including lunar surface activities, starting as early as end of 2022.

• July 20, 2019: The goal of humans again walking on the Moon is one giant leap closer. Lockheed Martin has completed building the capsule for NASA's Orion spacecraft. The crew module capsule for the uncrewed Artemis 1 mission to the Moon has been stacked on top of the Orion service module, which was also recently finished. 51)
- Vice President Mike Pence made the announcement today at a ceremony in front of the Orion spacecraft in the aptly-named Neil Armstrong Operations and Checkout Building at the Kennedy Space Center in Florida. The event and announcement commemorated the 50-year anniversary of the Apollo 11 Moon landing.
- The Orion spacecraft is like none other in its design and capability.
- "Orion is a new class of spaceship, uniquely designed for long-duration deep space flight, that will return astronauts to the Moon and eventually take the first humans to Mars, and bring them all back safely." said Lisa Callahan, vice president and general manager of Commercial Civil Space at Lockheed Martin. "Orion will accelerate scientific discovery of our solar system and will be the cornerstone of the defining space achievement of this era."
- Since the crew module pressure vessel arrived in Florida, technicians and engineers from Lockheed Martin, NASA and supporting contractors have meticulously assembled the capsule into its finished state. The work included installing the capsule's avionic computers, harnesses, propulsion system and its 12 engines, 11 parachutes, its large 16-foot-diameter heat shield, forward bay cover and numerous other systems and components.
- Throughout assembly, the team tested and validated the many systems a hundred different ways to ensure they will operate as designed in the harshness of deep space," said Mike Hawes, Orion program manager for Lockheed Martin. "The Artemis 1 flight will test the design and workmanship of the capsule and its service module during the three-week mission out around the Moon and back. We're excited for this mission as it paves the way for the first crewed mission in 2022, Artemis 2."
- The crew module and service module were stacked together earlier in the week in the Final Assembly and System Testing (FAST) cell where they are now being fully integrated, including connecting the physical retention bolts and the umbilical lines between the two modules. The FAST cell is also where the Apollo spacecraft were integrated.
- The combined stack will then be powered up and undergo a series of integrated systems tests. In September, the combined stack will be shipped to NASA's Plum Brook Station in Ohio, where it will go through environmental testing in a large thermal vacuum chamber as well as testing for electromagnetic interference and compatibility.
- Once Orion returns to Kennedy at the end of the year, the spacecraft will go through final preparations before Lockheed Martin delivers it to ground systems for launch processing in early 2020.

• July 02, 2019: NASA successfully demonstrated on Tuesday the Orion spacecraft’s launch abort system can outrun a speeding rocket and pull astronauts to safety during an emergency during launch. The test is another milestone in the agency’s preparation for Artemis missions to the Moon that will lead to astronaut missions to Mars. 52)
- During the approximately three-minute test, called Ascent Abort-2, a test version of the Orion crew module launched at 7 a.m. EDT from Space Launch Complex 46 at Cape Canaveral Air Force Station in Florida on a modified Peacekeeper missile procured through the U.S. Air Force and built by Northrop Grumman.
- The Orion test spacecraft traveled to an altitude of about six miles, at which point it experienced high-stress aerodynamic conditions expected during ascent. The abort sequence triggered and, within milliseconds, the abort motor fired to pull the crew module away from the rocket. Its attitude control motor flipped the capsule end-over-end to properly orient it, and then the jettison motor fired, releasing the crew module for splashdown in the Atlantic Ocean.
- A team is collecting the 12 data recorders that were ejected during the test capsule’s descent. Analysis of the information will provide insight into the abort system’s performance.
- “We're building the most powerful rocket in the world to send astronauts to the Moon in the Orion spacecraft for Artemis missions,” said Bill Hill, deputy associate administrator for Exploration Systems Development at NASA Headquarters in Washington. “With this exploration system designed to safely carry humans farther into space than ever before, we'll also have an equally powerful launch abort system that will pull the crew away if there is a problem with the rocket during the early portion of ascent.”
- The tower-like abort structure consists of two parts: the fairing assembly, which is a shell composed of a lightweight composite material that protects the capsule from the heat, air flow and acoustics of the launch, ascent, and abort environments; and the launch abort tower, which includes the abort motor, attitude control motor, and jettison motor. The system is built specifically for deep space missions and to ride on NASA’s powerful Space Launch System (SLS) rocket.
- “Launching into space is one of the most difficult and dangerous parts of going to the Moon,” said Mark Kirasich, Orion program manager at Johnson Space Center in Houston. “This test mimicked some of the most challenging conditions Orion will ever face should an emergency develop during the ascent phase of flight. Today, the team demonstrated our abort capabilities under these demanding conditions and put us one huge step closer to the first Artemis flight carrying people to the Moon.”
- NASA was able to accelerate the test schedule and lower costs by simplifying the test spacecraft and eliminating parachutes and related systems. NASA already qualified the parachute system for crewed flights through an extensive series of 17 developmental tests and eight qualification tests completed at the end of 2018.
- Engineers are making progress building and testing the Orion spacecraft for Artemis 1, the first uncrewed mission with the SLS rocket – an integrated system traveling thousands of miles beyond the Moon – and for Artemis 2, the first mission with astronauts.
- At NASA’s Kennedy Space Center in Florida, technicians are preparing to attach the Orion crew and service modules before testing at the agency’s Plum Brook Station in Sandusky, Ohio, later this year. The crew module for Artemis 2 is being outfitted with thousands of elements – from bolts and strain gauges to parachutes and propulsion lines.
- The agency recently reached major milestones for the SLS rocket, assembling four of the five parts that make up the massive core stage that will launch Artemis 1 and delivering the four engines that will be integrated into the core stage, along with the engine section, later this summer. When completed, the entire core stage will be the largest rocket stage NASA has built since manufacturing the Saturn V stages for NASA’s Apollo lunar missions in the 1960s.
- Orion is part of NASA’s backbone for deep space exploration, along with the SLS and Gateway, that will land the first woman and next man on the Moon by 2024. Through the Artemis program, the next American Moon walkers will depart Earth aboard Orion and begin a new era of exploration.
• March 28, 2019: ESA Director of Human and Robotic Exploration, David Parker, and Associate Administrator for NASA’s Science Mission Directorate, Thomas Zurbuchen, signed a Statement of Intent to coordinate joint science research about the Moon and identify opportunities for lunar mission cooperation. 53)
- Signed during the National Academies’ Space Science Week in Washington DC, the statement highlights a common interest in accessing the Moon, driven by scientific discovery and support for private-sector capabilities, and mission services on the lunar surface and in the vicinity of the Moon.
- “We are thrilled to be bringing European expertise to the table,” said David, “and to work collaboratively to prepare the way to a sustainable presence on the Moon where nations and the private sector work together to deliver benefits for all the people of Earth.”
Soon To The Moon
- The Moon has once again captured the attention of space agencies as an 'archive' of cosmic history and a cornerstone for planetary science. Water ice and other possible resources at the Moon offer the possibility of the Moon becoming a 'stepping stone' to the wider Solar System. The US Vice President Mike Pence directed NASA on March 26 to accelerate a human return to the Moon in the next five years.
- ESA’s proposal to its Member States for the next period of its European Exploration Program includes continuing its involvement in endeavors in low Earth orbit as well as around and on the Moon and Mars. This will allow scientific research, development of key technologies and international cooperation – inspiring missions that expand humankind's presence beyond Earth.
- In going forward to the Moon, ESA and NASA are committed to sustainable lunar exploration made possible by cooperation – not only with space agencies but also with the private sector. New commercial capabilities offer new opportunities to explore – and to expand economic activity into deep space. Both agencies will continue to explore scientific collaboration on payloads and future missions to the Moon.
- Teaming up is nothing new for ESA and NASA, with both agencies working together on the International Space Station, robotic missions and more recently on the Orion spacecraft, the first spacecraft capable of delivering a crew to the Moon since 50 years.
- ESA is supplying the European Service Module for Orion, in an arrangement that stems from the International Space Station partnership. Based on ESA’s proven Automated Transfer Vehicles for supplying the International Space Station, the module will provide everything to keep the astronauts alive, including oxygen, water, thermal control, electricity and propulsion.
- ESA looks forward in cooperation and collaboration to probe the mysteries of the Moon and to use insights found as a springboard towards humankind’s future in deep space.
• November 7, 2018: European module arrives at Kennedy Space Center: After a 24-hour journey from Bremen, Germany with stops in Hamburg and Portsmouth, USA, the European Service Module landed yesterday at Kennedy Space Center in Florida. The Antonov An-124 aircraft landed on 6 November 2018 at 11:35 EST, local time. 54)
- The first service module is a key component that will see Orion around the Moon for Exploration Mission-1. It will make the powerful burns required to enter and exit lunar orbit as well as softer burns to allow for space maneuvering and course correction. After years of designing, building, and testing in Europe, the powerhouse that will propel NASA’s Orion spacecraft to the Moon will soon be mated with the rest of the spacecraft to undergo final testing before flight.
- The European Service Module is a truly European endeavor. Primary components were built and integrated in Italy and Germany, with smaller components delivered from several European nations, including the solar arrays from the Netherlands.
- ESA’s partnership with NASA takes this European effort to the global stage. For the first time, NASA will use a European-built system as a critical element to power an American spacecraft, extending the international cooperation of the International Space Station into deep space.
- The trust in European know-how is thanks to the successful Automated Transfer Vehicle (ATV) program that provided reliable cargo deliveries to the Space Station. ATV’s engineering and operational legacy were crucial to developing the European Service Module, which some of its flight-proven hardware, such as the auxiliary thrusters and pressurization tanks.
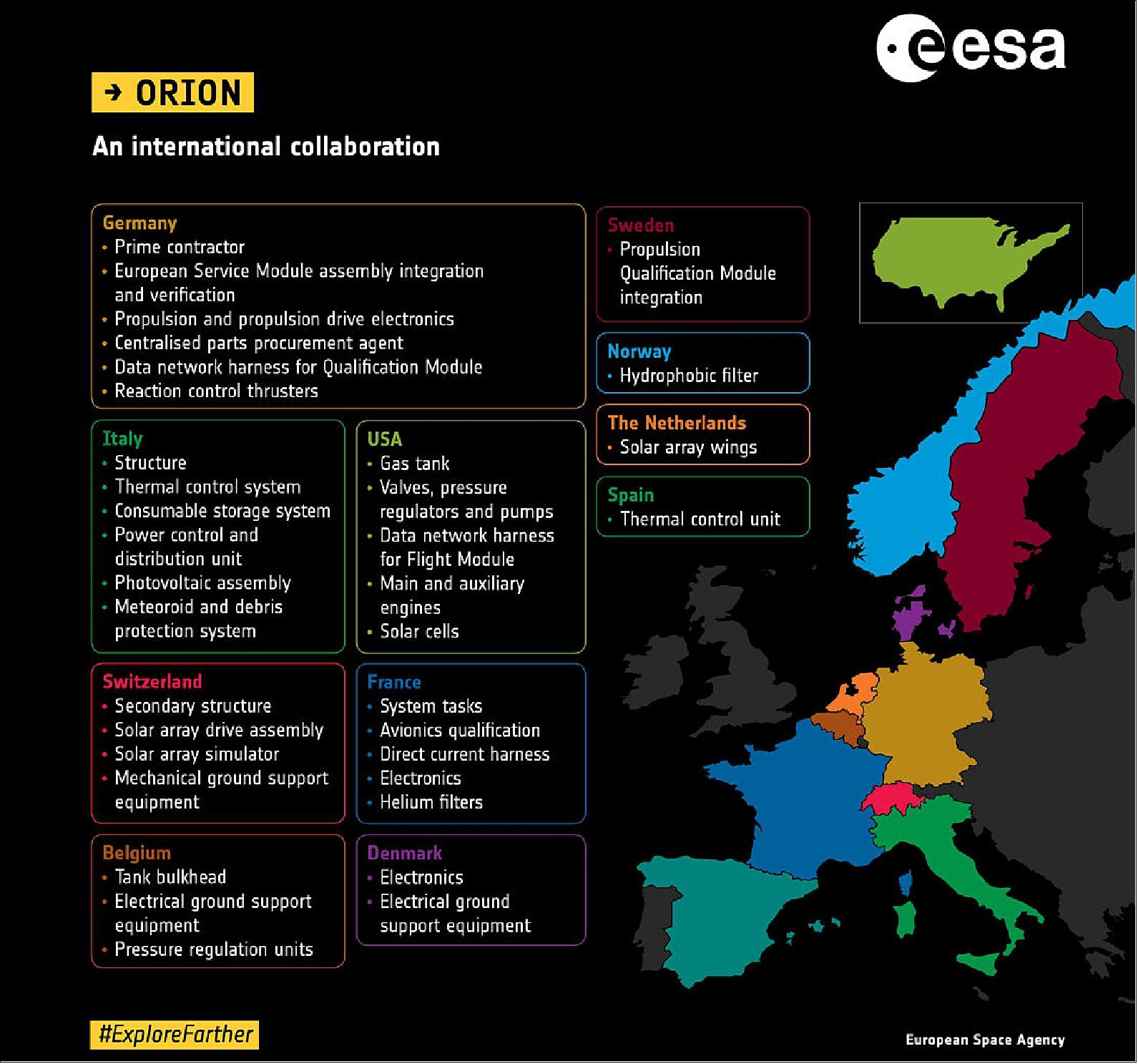
Legend to Figure 57: The Orion spacecraft is built by NASA with ESA providing the service module. The arrangement stems from the international partnership for the International Space Station. NASA’s decision to cooperate with ESA on a critical element for the mission is a strong sign of trust and confidence in ESA’s capabilities. More than 20 companies around Europe are now building the European Service Module as NASA works on Orion and the Space Launch System.
- Next steps: Next up for the ESM-1 (European Service Module-1) is unloading and unpacking. The unit will be checked for integrity after its transatlantic flight and then unloaded in the Operations & Checkout (O&C) building at Kennedy Space Center.
- Some parts of the ESM-1 have already been shipped by sea in two containers and are already awaiting the arrival of the larger air shipment. These include nozzle covers, heat shield, and insulation layers, among other components. The solar arrays will arrive in February 2019.
- Once in the O&C, the ESM-1 will be fitted to the Crew Module Adapter (CMA) to form the Orion Service Module. This process takes some time, as all fluid and gas pipes must be welded and electrical wiring connected. The crew module will then be mated with the service module and the completely integrated spacecraft will head to NASA Glenn Research Center’s Plum Brook Station in Ohio for a 60-day test campaign. The entire spacecraft will be subjected to intense launch conditions in the world’s largest vacuum chamber.
- Once complete, the spacecraft will travel back to Kennedy Space Center to meet its launcher, the Space Launch Systems (SLS) rocket, and prepare for its first mission, a lunar orbital mission without astronauts, to demonstrate the spacecraft’s capabilities.
- Work is already underway on the second European Service Module which will provide air, water, and temperature control for the astronauts that will fly on Orion’s Exploration Mission-2.
- ESA is immensely proud to play a crucial role in humanity’s return to the Moon, thanks to the hard work and determination of the many teams involved in bringing the European Service Module to this next step on the journey back to the Moon.
• November 6, 2018: The powerhouse that will help NASA’s Orion spacecraft venture beyond the Moon is stateside. The European-built service module that will propel, power and cool during Orion flight to the Moon on Exploration Mission-1 arrived from Germany at the agency’s Kennedy Space Center in Florida on Tuesday to begin final outfitting, integration and testing with the crew module and other Orion elements (Figure 58). 55)
- The service module is integral to human missions to the Moon and Mars. After Orion launches on top of the agency’s Space Launch System rocket, the service module will be responsible for in-space maneuvering throughout the mission, including course corrections. The service module will also provide the powerful burns to insert Orion into lunar orbit and again to get out of lunar orbit and return to Earth. It is provided by ESA (European Space Agency) and built by ESA’s prime contractor Airbus of Bremen, Germany. NASA’s prime contractor for Orion, Lockheed Martin, built the crew module and other elements of the spacecraft.
- “We have a strong foundation of cooperation with ESA through the International Space Station partnership, and the arrival of the service module signifies that our international collaboration extends to our deep space human exploration efforts as well,” said Bill Gerstenmaier, NASA’s associate administrator for Human Exploration and Operations.
- The European-built service module brings together new technology and lightweight materials while taking advantage of spaceflight-proven hardware. It is comprised of more than 20,000 components, including four solar array wings that provide enough electricity to power two three-bedroom homes, as well as an orbital maneuvering system engine, a recently refurbished engine previously used for in-orbit control by the space shuttle. Beginning with Exploration Mission-2, the module also will provide air and water for astronauts flying inside Orion, which will carry people to destinations farther than anyone has travelled before and return them safely to Earth.
- “Our teams have worked together incredibly hard to develop a service module that will make missions to the Moon and beyond a reality,” said Mark Kirasich, NASA’s Orion program manager. “It is quite an accomplishment of ESA and Airbus to have completed the developmental work on the module and have this major delivery milestone behind us.”
- Now that the service module is at Kennedy, it will undergo a host of tests and integration work ahead of Exploration Mission-1. Engineers will complete functional checkouts to ensure all elements are working properly before it is connected to the Orion crew module. Teams will weld together fluid lines to route gases and fuel and make electrical wiring connections. The service module and crew module will be mated, and the combined spacecraft will be sent to NASA’s Glenn Research Center’s Plum Brook Station in Ohio early next year where it will undergo 60 days of continuous testing in the world’s largest thermal vacuum chamber to ensure Orion can withstand the harsh environment of deep space. Once that testing is complete, it will return to Kennedy for integration with the SLS rocket in preparation for launch.
- NASA is leading the next steps to establish a permanent human presence at the Moon. The first in a series of increasingly complex missions, Exploration Mission-1 is a flight test of an uncrewed Orion spacecraft and SLS rocket that will launch from NASA’s modernized spaceport at Kennedy. The mission will send Orion 40,000 miles beyond the Moon and back and pave the road for future missions with astronauts. Together, NASA and its partners will build the infrastructure needed to explore the Moon for decades to come while laying the groundwork for future missions to Mars.

• October 30, 2018: The European Service Module that will power and propel the Orion spacecraft on its first mission around the Moon will ship early next week from Bremen to the United States. It will take off in an Antonov An-124 aircraft in the early hours of 5 November and arrive at Kennedy Space Center in Florida, US on 6 November. 56)
- Designed and manufactured in Italy and Germany, the powerful workhorse is Europe’s contribution to humanity’s return to the Moon.
- Trusted partner: For the first time, NASA will use a European-built system as a critical element to power an American spacecraft, thanks in large part to ESA’s successful Automated Transfer Vehicle (ATV) program that brought supplies to the International Space Station.
- The knowledge gained by ESA and European industry from designing, building and operating the complex and successful Automated Transfer Vehicle missions was instrumental for ESA’s participation in NASA’s Orion spacecraft.
- The unit resembles ATV, from which it evolved. Three types of engine will propel Orion to its destination and can turn it in all directions to align the spacecraft as needed.
- Inside the European Service Module, large tanks hold fuel as well consumables for the astronauts: oxygen, nitrogen and water.
- Radiators and heat exchangers keep the astronauts and equipment at a comfortable temperature, while the module’s structure is the backbone of the entire vehicle, like a car chassis.
- The European Service Module was built by main contractor Airbus Defence and Space, with many companies all over Europe supplying components.
- Once at Kennedy Space Center, the European Service Module will be connected to the Orion crew module and its adapter in preparation for Exploration Mission-1 – a test flight without astronauts that will travel farther into space than any human-rated spacecraft has ventured. The mission is expected to launch in 2020.
- Work is already underway on the second European Service Module that will power a crewed mission around the Moon.
- The Orion spacecraft will eventually launch together with components of the Gateway, a human-tended outpost in lunar orbit that will aid human and robotic exploration of the Moon.
• October 29, 2018: Aerojet Rocketdyne recently completed qualification testing for the enhanced reaction control thruster system for NASA’s Orion crew vehicle, helping to clear the way for the Lockheed Martin-built spacecraft’s second test flight, and first mission to cislunar space, called Exploration Mission-1 (EM-1). 57)
- The RCS (Reaction Control System) is the only means of guiding the Orion crew module after it separates from its service module in preparation for atmospheric reentry and subsequent splashdown. Consisting of 12 MR-104G hydrazine thrusters capable of 160 pounds of thrust each, the system also will ensure that the spacecraft is properly oriented (with its heat shield pointed downward) for reentry, and stable during descent.
- Aerojet Rocketdyne employed cutting-edge additive manufacturing processes, also known as 3D printing, in fabricating the RCS engine nozzle extensions. These 3D printed components, along with other items on the spacecraft, mark one of the first times in history that a spacecraft carrying humans will incorporate additively manufactured parts.
- “Additive manufacturing eliminates traditional design constraints, as well as reduces manufacturing times,” said Eileen Drake, Aerojet Rocketdyne CEO and president. “Our use of 3D printing on Orion is just one example of how we are incorporating this breakthrough technology across our portfolio of propulsion products.”
- During the yearlong qualification test program at Aerojet Rocketdyne’s Redmond, Washington, facility, a single engine was subjected to shock and vibration, exceeding the maximum stresses expected during the upcoming EM-1 launch. For EM-1, Orion will be launched toward the Moon on the maiden flight of NASA’s Space Launch System (SLS) rocket. The non-flight test engine – drawn from the same production lot as the EM-1 RCS flight engines – burned through 619 pounds of propellant during the test program, accumulating 962 seconds of total firing time.
- “Following our rigorous qualification testing program, we’re confident that this enhanced RCS system is ready to fly,” added Drake. “The reaction control thrusters are critical to the Orion capsule’s safe return to Earth at the completion of EM-1 as well as future crewed missions.”
- The EM-1 RCS thruster design builds on the flight proven engine demonstrated on the Exploration Flight Test-1 mission in 2014. The enhanced system features a stronger structure, increased resistance to thermal stresses and reduced mass. The improved manufacturing process updated the system to account for changed loads and to ultimately increase affordability.
- On EM-1 an uncrewed Orion spacecraft will launch into a distant retrograde orbit around the Moon before returning to Earth for a splashdown in the Pacific Ocean. It will be followed by EM-2, during which Orion will fly near the Moon with astronauts on board.
- In addition to the RCS, Aerojet Rocketdyne is supplying the main- and upper-stage liquid engines for the SLS, and well as the jettison motor that will separate Orion’s launch abort system from the crew module shortly after activation of the SLS’s second stage. The company also is supplying the auxiliary thrusters for Orion’s European Service Module (ESM), and supported a NASA-led effort to modify a Space Shuttle OMS-E engine, originally built by Aerojet Rocketdyne for its new application as the ESM main maneuvering engine.
• October 23, 2018: After years of planning, development, building and integration, the European Service module that will power the Orion spacecraft on its journey into lunar space is ready to be shipped. In November the fully integrated, tested, and sealed European workhorse will leave Bremen on an Antonov cargo plane for Kennedy Space Center in Florida, USA where it will be integrated with the rest of the Orion spacecraft. 58)
- ESA’s European service module will provide power, water, air and electricity to NASA’s Orion exploration spacecraft that will eventually fly beyond the Moon with astronauts. The European Service Module is now complete for Orion’s first mission that will do a lunar fly-by without astronauts to demonstrate the spacecraft’s capabilities.
- Orion’s solar wings will be shipped separately, also from Bremen. In the USA the module will be stacked together with NASA’s Crew Module Adaptor and Crew Module, the first time the complete spacecraft will be on display.
- More tests await the Orion spacecraft at NASA’s Plum Brook facility where it will be put in the world’s largest vacuum chamber to simulate spaceflight as well as being subjected to acoustic tests to simulate the intense vibrations Orion will endure when launched on the world’s largest rocket, NASA’s Space Launch Systems.
- This is a proud moment for Europe. For the first time, NASA will use a European-built system as a critical element to power an American spacecraft, extending the international cooperation of the International Space Station into deep space.
- Work is already underway on the second European Service Module. The structure is complete and over 11 km of cables are being meticulously placed in preparation for the computers and equipment that will keep astronauts alive and well for the second Orion mission called EM-2 (Exploration Mission-2).

• October 2018: Following a very successful year of manufacturing, assembly and testing in factories located around the globe, NASA and ESA are preparing to deliver the major Exploration Mission-1 (EM-1) Orion flight elements, including the Crew Module, ESA Service Module and Launch Abort System. This international effort to design and develop a deep space exploration capable human spacecraft is rapidly transitioning from the design, development and test phase to the early test flight and production phase. Two major flight tests, an Ascent Abort test and EM-1, Orion's first flight onboard NASA's new heavy lift Space Launch System, are planned for the near future. Further, Orion will play a crucial role in the ambitious new Deep Space Gateway human exploration Program. 59)
• September 18, 2018: Last week at the Airbus integration hall in Bremen, Germany, technicians installed the last radiator on the European Service Module for NASA’s Orion spacecraft marking the module’s finished integration. 60)
- ESA’s European service module will provide power, water, air and electricity to NASA’s Orion exploration spacecraft that will eventually fly beyond the Moon with astronauts. The European Service Module is now complete for Orion’s first mission that will do a lunar fly-by without astronauts to demonstrate the spacecraft’s capabilities.

- Much like closing the bonnet on a car, with the radiators in place technicians can no longer access the internals of the European service module, symbolically ending the assembly and integration of the module that will fly further into our Solar System than any other human-rated spacecraft has ever flown before.
- Technicians worked 24 hours a day in three shifts to complete the service module’s assembly which is now going through the last stages of its extensive testing. Engineers will put the module through its paces with functional tests that include checking the newly installed radiators and testing the propulsion system with its intricate pipelines that deliver fuel and oxidizer to the spacecraft’s 33 engines.
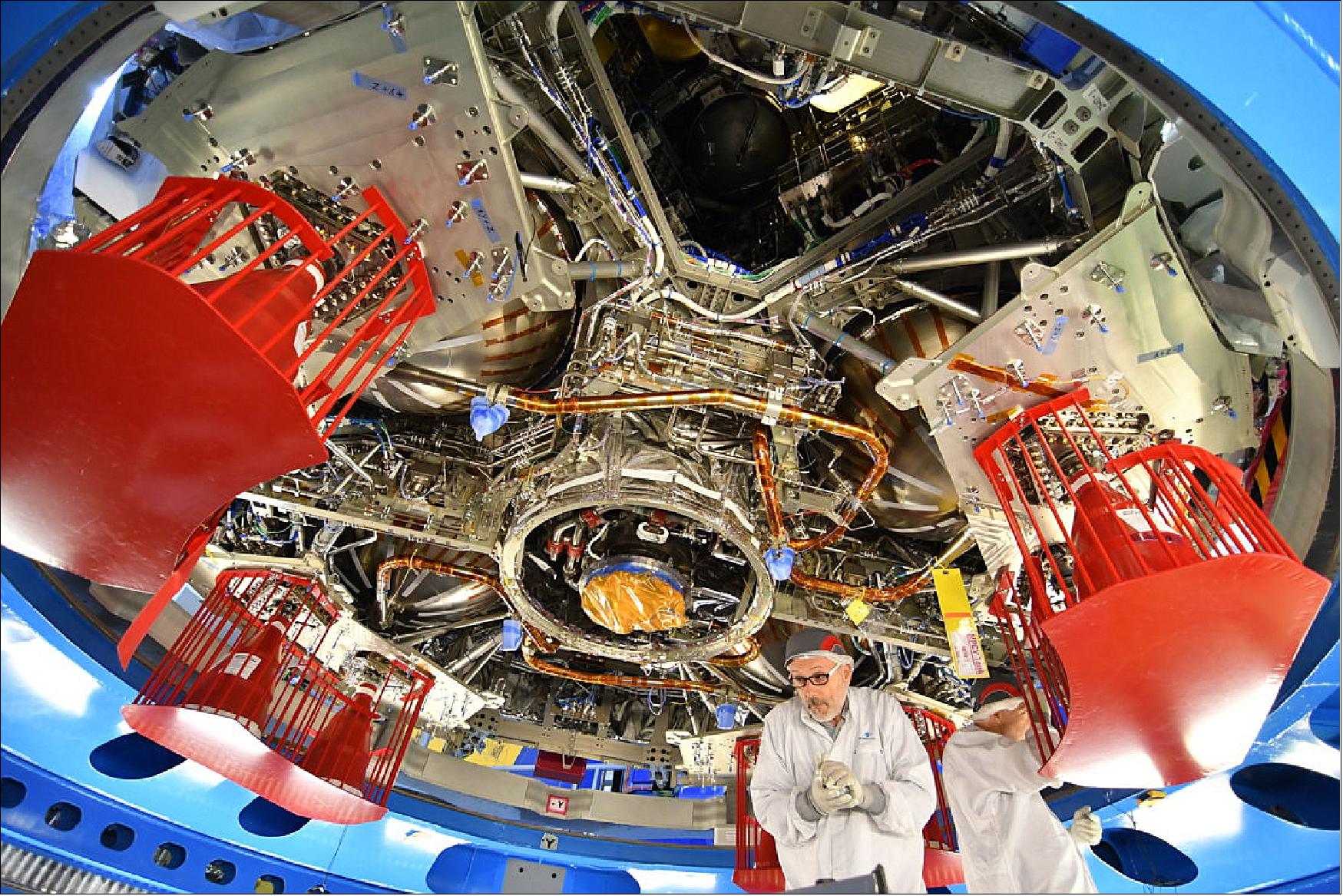
- Once complete the service module will be packed and flown to NASA’s Kennedy Space Center in Florida, USA. Orion’s solar wings will be shipped separately, also from Bremen. In the USA the module will be stacked together with NASA’s Crew Module Adaptor and Crew Module, the first time the complete spacecraft will be on display.
- More tests await the Orion spacecraft at NASA’s Plum Brook facility where it will be put in the world’s largest vacuum chamber to simulate spaceflight as well as being subjected to acoustic tests to simulate the intense vibrations Orion will endure when launched on the world’s largest rocket, NASA’s Space Launch Systems.
- Second module getting ready: Meanwhile technicians in Bremen are not resting as work on the second European Service Module is already well under way. The structure is complete and over 11 km of cables are being meticulously placed in preparation for the computers and equipment that will keep astronauts alive and well for the second Orion mission called Exploration Mission-2.
• August 16, 2018: Technicians at NASA's Kennedy Space Center (KSC) in Florida recently secured the heat shield to the bottom of the crew module, using 68 bolts. Designed and manufactured by Orion prime contractor, Lockheed Martin, the heat shield is like an intricate puzzle with pieces that all have to fit together perfectly. Before the final installation, a fit check was performed to ensure all of the bolt fittings lined up. 61)

- "Installation of the EM-1 crew module heat shield is a significant milestone representing the beginning of closing out the crew module assembly," said Jules Schneider, Lockheed Martin Orion senior manager for KSC Operations. "When the heat shield is installed, access to components becomes more difficult, and in some cases there is no more access. So by installing the heat shield you are declaring that a certain percentage of the spacecraft is finished."
- Measuring 5.06 m in diameter, Orion's new heat shield is the largest of its kind developed for missions that will carry astronauts. The heat shield base structure has a titanium truss covered with a composite substrate, or a skin composed of layers of carbon fiber material.
- In a new process, several large blocks of an ablative material called Avcoat, licensed from Boston-based Textron Systems, were produced at Michoud Assembly Facility in New Orleans by Lockheed Martin. They were shipped to Kennedy, where Lockheed Martin technicians machined them into more than 180 unique blocks and bonded them to the heat shield's surface.
- To fill tiny gaps between the blocks, the seams were filled with a mixture that over time will become solid. Technicians applied a coat of white epoxy paint to the heat shield's surface and then applied aluminized tape after the painted surface dried. The tape provides surface resistivity, and absorbs solar heat and infrared emissions.
- While Avcoat isn’t new to spacecraft – it was used on the heat shields of Apollo and the Orion EFT-1 (Exploration Flight Test-1) – the technique of using blocks instead of injecting the ablative material is proving to be a real production time-saver.
- "A benefit of switching from the honeycomb system to the blocks is we now can make the Avcoat blocks at the same time that the Orion structure is being made, and when the module is ready we can secure the blocks, which saves time," said John Kowal, NASA Orion Thermal Protection System manager at Johnson Space Center in Houston. "Before, with EFT-1, we had to wait for the carrier portion to be done, and then apply the Avcoat directly to the crew module."
- During its first mission around the Moon, engineers will monitor how Orion’s systems perform in the environment of deep space and its return to Earth. During re-entry the ablative material of the Avcoat blocks will burn away, essentially carrying the heat away from Orion because of the gases created during the ablative process.
• June 6, 2018: At centers across NASA, the agency is rocketing ahead toward Exploration Mission 1 (EM-1) and Exploration Mission 2 (EM-2). 62)
- EM-1 and EM-2 are the final stages of a three-part mission series designed to establish NASA’s new Exploration Class human spaceflight capability. The first stage, Exploration Flight Test 1 (EFT-1), was completed in 2014 when a Delta IV Heavy rocket sent the uncrewed Orion capsule 3,600 miles from Earth.
- “It was the first time that we had flown a vehicle designed to carry humans that far away from Earth,” said Dr. Ellen Ochoa, former Johnson Space Center (JSC) director, speaking at JSC about ongoing efforts to expand manned deep space exploration. “[EFT-1] was testing the items that are really most critical for crew survival, including things like the parachute system and the heat shield. It made headlines not only around the country but around the world. And it’s really just a hint of things to come.”
- The next stage of the mission is EM-1. Scheduled for 2020, it will be the first integrated flight of Orion and the Space Launch System (SLS), the world’s most powerful launch vehicle. EM-1 will be followed by EM-2 in 2023: the first flight to unite crew with Orion and the SLS. EM-2 will take astronauts 40,000 miles past the moon—farther than any manned spacecraft has ever gone.
- Before EM-2 can get off the ground, the agency will conduct a flight test in 2019 called the Ascent Abort-2 (AA-2). The test will examine Orion’s launch abort system (LAS), which makes it possible to rescue the crew in the event of a catastrophic malfunction during launch.
- “It’s really the only full-scale system test that we have before we put crew on the vehicle. So it’s definitely critical for making sure that we can get the crew safely away in an emergency,” said Jennifer Devolites, AA-2 crew module deputy manager.
- For the three-minute test, the LAS will be launched from Cape Canaveral on a solid rocket motor providing 500,000 pounds of thrust (2224 kN) to propel the system six miles up to the abort condition. At that point, the crew module flight computers will send commands to light the abort motor rocket and separate the crew module from the booster.
- “When the abort motor fires, it pulls the crew module away from the booster extremely fast. After 1.1 seconds after abort, we’ve got greater than five F-22 fighter jets on full afterburners in terms of thrust,” said Devolites. “After 15 seconds, the crew modules gain more than two miles of altitude. At around 43,000 feet, the attitude control motor starts to reorient the system. And then after reorientation is complete, the LAS separates to allow the capsule to descend safely back to Earth.”
- Work on the rest of the Orion spacecraft is moving forward as well. “Orion is more than just a crew module. It’s a complex set of systems—life support, propulsion, thermal control,” said Annette Hasbrook, assistant manager for Orion Program Integration. “Down at the Kennedy Space Center, we’re making great progress. That is our production facility and that’s where we’re assembling the Exploration Mission 1 spacecraft.”
- Below the crew module sits the ESM (European Service Module), which is being provided by ESA (European Space Agency). “The ESM is being assembled in Bremen by the Airbus Corporation,” said Hasbrook. “They are in almost final assembly and test and will be bringing that service module, delivering it to the Kennedy Space Center later this summer. Once that arrives, we have a 404-day timeline from the time we bring it in until we turn it over to the ground systems at Kennedy Space Center for final integration onto the amazing SLS rocket for launch.”
- The agency is also in build for EM-2. “We have multiple vehicles in flow, and the Exploration Mission 2 spacecraft is currently under assembly at the Michoud Assembly Facility down in Louisiana. They’re building their primary structure and that’s going to be delivered to KSC later this summer to begin its integration,” Holbrook added.
- While work continues on Orion and the SLS, NASA is also making plans to build the Lunar Orbital Platform-Gateway in the 2020s. This manned spaceport, which will be constructed on orbit, will include a power and propulsion element as well as habitation, logistics, and airlock capabilities.
- “NASA and its partners will use the Gateway for deep space operations, including missions on the moon, with decreasing reliance on Earth. We’ll use the lunar orbit as a place to stage: where we will actually build up a small crew-tended spaceport that will then do testing. We will learn about what’s going on at the moon, we’ll do testing on the moon surface, and then we will build up, do other testing, and move on to Mars,” said Vanessa Wyche, director of the Exploration Integration and Science Directorate at JSC.
- The power and propulsion element for the Gateway is being led by NASA/GRC (Glenn Research Center). The habitation systems are in design, with concepts being worked by five commercial partners. “Of those five companies, there are two that are going to do ground testing here at the Johnson Space Center. We’re readying ourselves for the hardware to show up so that we will test it. That will happen next summer,” added Wyche.
- At JSC, the work for EM-1 and EM-2 is being conducted using a “lean development” approach. “That’s been really one of the goals of this project as well. To look at how we can do things differently. Find more efficiencies,” said Devolites.
- One of the areas they have focused on is developing a team culture that encourages people to innovate. “We also reduce cost and schedule through iterative systems engineering,” said Devolites. “By doing that, we actually had 90% of our flight software complete by the time we got to our Critical Design Review because of all the early integrated testing that we did. And we also used an agile software development process for that.” Additionally, the center employs a data-centric, online collaborative system to enhance systems engineering and team communication. This has produced two important results: less paperwork and fast decision-making.
- While the focus of EM-1 and EM-2 is on advancing human spaceflight farther than ever before, the mission benefits can be felt on Earth as well. NASA’s work on Orion and the SLS is supported by companies in 49 of the 50 states. These efforts are fueling industries and technology development across the nation, helping advance job opportunities and workforce skill development.
• April 23, 2018: The European service module that will provide power, water, air and electricity to NASA’s Orion Moon module has taken a large step closer to completion with the installation of its fuel tanks and testing of its solar wings. 63)
- The large tanks that will provide propellant for the spacecraft are now fitting snugly inside the spacecraft at the Airbus assembly hall in Bremen, Germany.
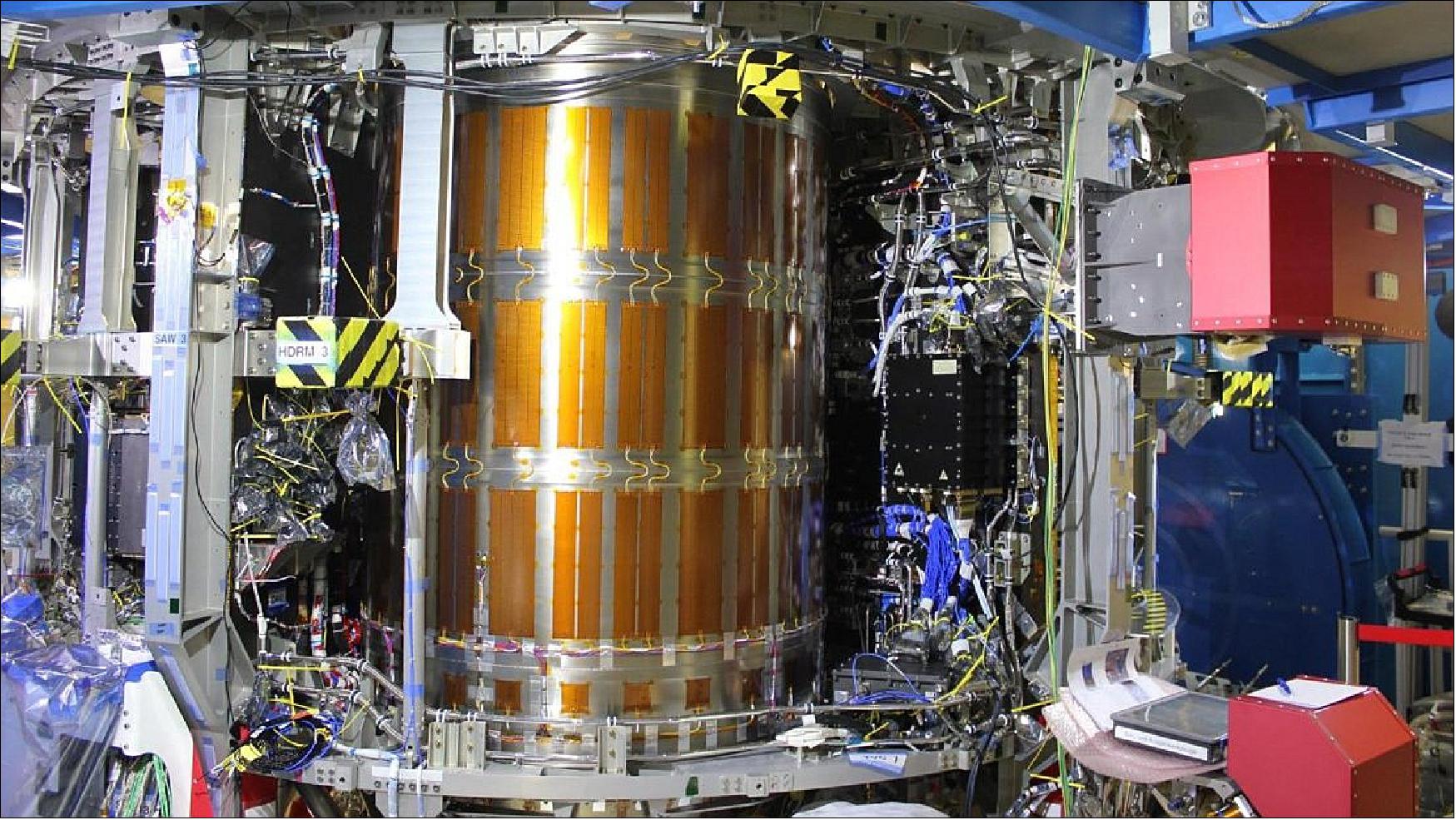
Legend to Figure 63: The two sets of tanks are connected by intricate pipelines to 33 engines. Sensors and computers control the system. The European service module is a small but complex spacecraft packed with equipment. The large tanks are installed as one of the last components to allow technicians more room to work.
- Meanwhile the solar arrays Orion will use to produce electricity are being tested at ESA’s technical heart in the Netherlands. Folded for launch, the fragile solar panels need to survive the rumbling into space aboard the most powerful rocket ever built, NASA’s Space Launch System.
- Orion’s solar panels will be folded inside the rocket fairing on the first leg of the trip around the Moon. Once released from the rocket they will unfold and rotate towards the Sun to start delivering power.
- To make sure the solar panels will work after the intense launch, ESA engineers are putting them through rigorous tests that exceed what they will experience on launch day. This includes vibrating them on a shaking table and placing them in front of enormous speakers that recreate the harsh launch conditions.
• April 20, 2018: A few multi-layer windows on a spacecraft provide astronauts the view they may need for navigating space and carrying out their exploration mission with visual data. NASA is working to improve the durability of those windows, and reduce cost and weight, while maintaining the clarity astronauts need to carry out their tasks and view the Earth and other destinations as they travel farther into the solar system. 64)
- The space shuttle used only glass panes for its primary windows. While these provided good optical quality, they added costly mass to the spacecraft. Modern spacecraft windows incorporate acrylic and other plastics that are lighter, stronger and less brittle, but often provide lower quality optical properties.
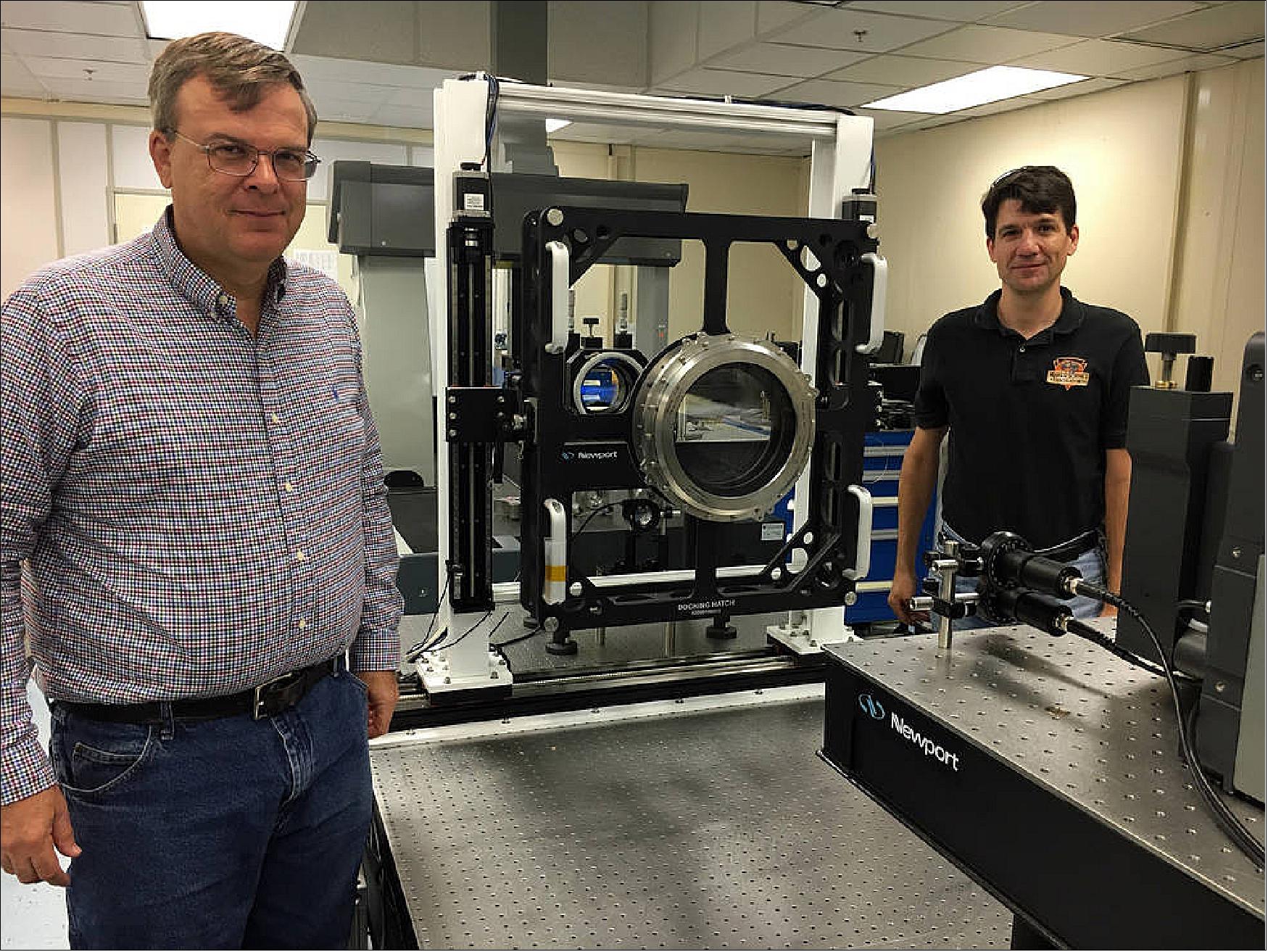
• March 6, 2018 (update), Jan. 5, 2018: Engineers preparing NASA’s deep space exploration systems to support missions to the Moon, Mars, and beyond are gearing up for a busy 2018. The agency aims to complete the manufacturing of all the major hardware by the end of the year for EM-1 (Exploration Mission-1), which will pave the road for future missions with astronauts. Planes, trains, trucks and ships will move across America and over oceans to deliver hardware for assembly and testing of components for the Orion spacecraft and the SLS (Space Launch System) rocket while teams at NASA’s Kennedy Space Center in Florida prepare the Ground Systems infrastructure. Testing will take place from the high seas to the high skies and in between throughout the year and across the country, not only in support of EM-1, but also for all subsequent missions.65)
• March 5, 2018: With the arrival of the Orion crew module to be used in the Ascent Abort-2 test at Johnson Space Center in Houston, the team is already at work with a lean, iterative development approach to minimize cost and ensure the flight test stays on schedule. 66)
- The approach involves considering how to do things differently, finding ways to execute elements of the buildup more efficiently and pushing on the norms of doing business to see if there are areas where productivity can be enhanced.
- Engineers and technicians at NASA/LaRC (Langley Research Center) in Hampton, Virginia modified a previously built Orion test vehicle for the flight. Development hardware from the Pad Abort-1 test is being reused and components such as radio frequency transmitters have been repurposed to support characterization and integrated tests. Shuttle heritage hardware, such as pyrotechnic control cards that otherwise were not being used, are being integrated into flight designs which allows the team to avoid building or building everything new. Flight and ground software architectures have been evolved from other development projects.
- Engineers involved in outfitting the crew module simultaneously are being trained to be flight controllers who will supervise the test when it launches from Cape Canaveral Air Force Station in Florida. Since the engineers involved in the work are extremely knowledge about the vehicle’s systems, they are being trained as operators and builders at the same time.
- Several milestones lay ahead of the team now that the crew module has arrived at Johnson. In the spring, various subsystem elements will be incorporated into the vehicle. In June, it will be powered “on” for the first time to ensure all the proper connections are made and the vehicle can execute its flight profile. After testing and verification, the crew module will be attached to a test rig and rotated sideways so engineers can once again measure mass and center-of-gravity. These attributes must mirror those projected for the first Orion with crew to ensure the AA-2 crew module will provide representative data.
- “We’re going to integrate hundreds of elements into the crew module,” said Jon Olansen, manager of the Ascent Abort-2 test crew module. “To get the vehicle ready to execute this critical test for future crew safety, we will install the avionics, power and communication components, the guidance, navigation and control instruments, all the interconnecting electrical wiring, and load the software to control it all. We will also install the flight instrumentation and data retrieval systems and a variety of sensors that will collect data essential for characterizing the performance of the vehicle during and after an abort.”
- Once complete, the crew module will be sent to NASA Glenn’s Plum Brook Station in Ohio, where it will undergo testing in an acoustic chamber to characterize how the structure will react to the abort environment. While the crew module is at Plum Brook, a separation ring that will connect the capsule to its booster will arrive at Johnson and be outfitted with wiring and other necessary elements. The crew module will return to Johnson in September and be mated with the separation ring before the two elements are then tested together and shipped to Kennedy Space Center in December.
- NASA’s work to build the test article and execute the flight test is a combined effort between the Orion Program and Advanced Exploration Systems Division at NASA Headquarters in Washington.

• February 16, 2018: When NASA's Orion spacecraft launches into space atop the agency's Space Launch System rocket on its first uncrewed integrated flight, Exploration Mission-1, it will travel thousands of miles beyond the Moon and return to Earth for splashdown in the Pacific Ocean. While traveling to deep space, Orion will experience extreme hot and cold temperatures, with re-entry temperatures nearing 5,000 degrees Fahrenheit (~2700ºC). 67)
- Before Orion is exposed to the harsh conditions of launch, deep space and re-entry, it is being prepared and tested inside the Neil Armstrong Operations and Checkout Building high bay at Kennedy Space Center in Florida.
- The Orion Program successfully completed a thermal cycle test on the Orion crew module inside a specially constructed thermal cycle chamber in the airlock of the high bay. Over the next five days, the crew module was rapidly cycled between hot and cold temperatures to thermally stress the hardware and ensure the workmanship of the crew module's critical hardware and its subsystem operations. The cycle of temperatures for the initial thermal test ranged from 29º to 129ºF (-1.66ºC to 53.9ºC) during 105 hours of testing.
- "Our goal was to expose the vehicle to rapid changes in temperature to see how Orion and its systems performed," said Rafael Garcia, Orion Program Test and Verification lead. "When the test was completed, we found no major issues."
- NASA and Lockheed Martin engineers in three different areas conducted and monitored the test, including the team in the high bay near the chamber controls, the ground test instrumentation readout area, and the Test and Launch Control Center, where system managers powered on and monitored the crew module's subsystems.
- A thermal cycle test of Orion's integrated crew and service module, along with electromagnetic interference and compatibility testing, is scheduled for early next year at NASA Glenn's Plum Brook Station in Sandusky, Ohio. While testing at Kennedy helps ensure Orion is ready for EM-1, Plum Brook facilities can simulate more extreme conditions and will help validate the integrated spacecraft design for future missions. The service module is the powerhouse of the spacecraft, providing it with the electricity, propulsion, thermal control, air and water it will need in space.
- During EM-1, the Orion crew module structure will reach temperatures ranging from minus 300 F to plus 250 F (-184ºC to +121ºC) depending on the Sun’s angle on its way to the Moon.
• February 14, 2018: Construction of the living and working area for the first crewed Orion spacecraft is well underway at the Michoud Assembly Facility (MAF) in New Orleans. Building on lessons learned from previous construction, Orion prime contractor Lockheed Martin has already completed four of the seven welds necessary to assemble the crew module pressure vessel. 68)
- Current schedules call for the completed pressure vessel to be shipped in September to the Kennedy Space Center (KSC) in Florida, where it will be outfitted to fly on EM-2 (Exploration Mission-2).
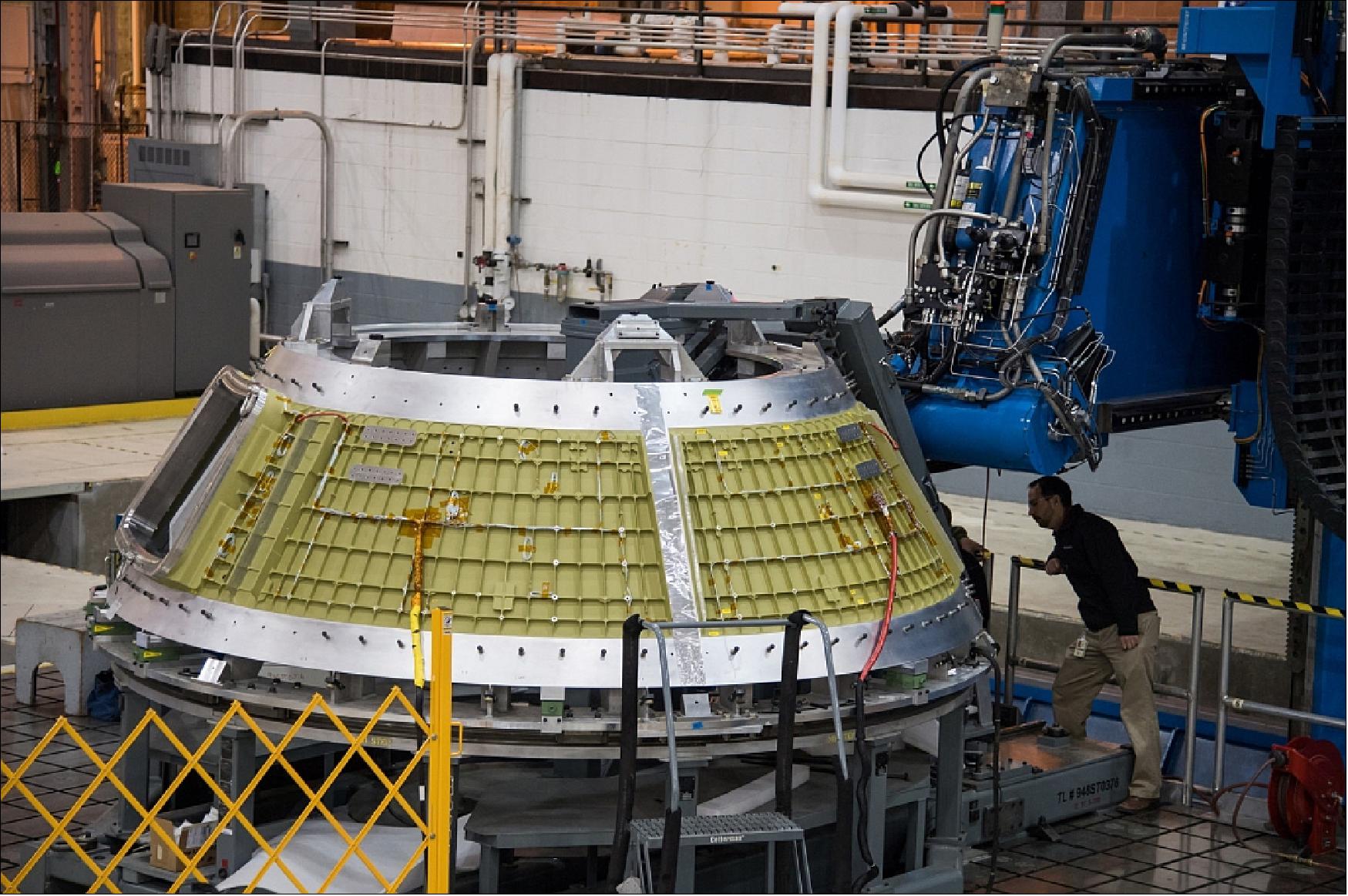
• October 12, 2017: While engineers in Europe continue to outfit the Orion spacecraft’s service module for EM-1 (Exploration Mission-1) in preparation for shipment to NASA’s Kennedy Space Center in Florida next year, work is already beginning on the service module that will power, propel, cool and provide air and water for the first crewed mission in the Orion spacecraft in the early 2020s. Technicians at Thales Alenia in Turin, Italy, are working on the primary structure of the European Service Module that will carry astronauts in Orion beyond the Moon during EM-2 (Exploration Mission-2). ESA (European Space Agency) and its contractors are providing Orion’s service module for its first two missions atop the Space Launch System rocket. NASA is leading the next steps in human space exploration and will send astronauts to the vicinity of the Moon to build and test the systems needed for challenging missions to deep space destinations including Mars. NASA is working with domestic and international partners to solve the great challenges of deep space exploration. 69) 70) 71)
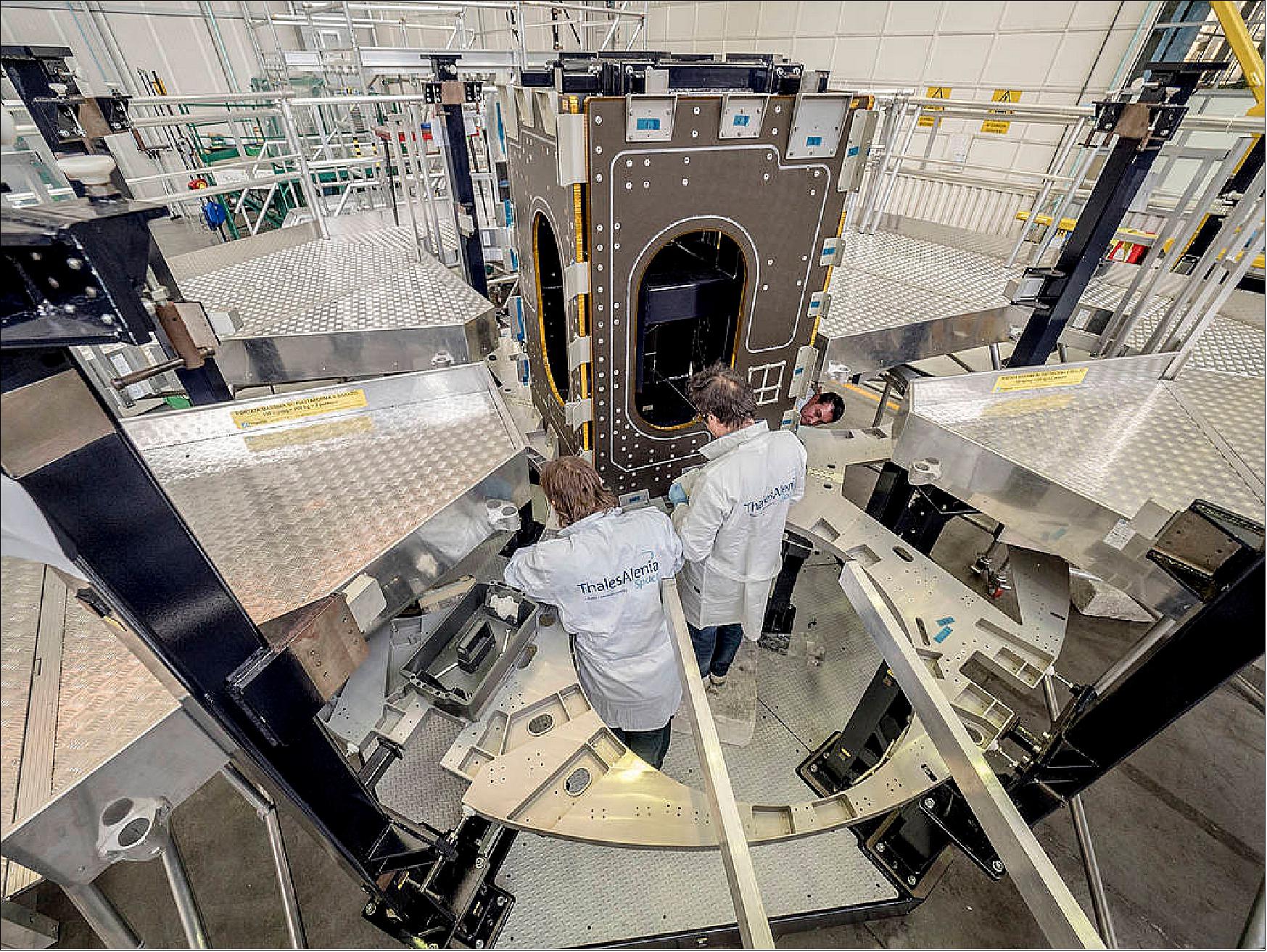
• August 24, 2017: Engineers at Lockheed Martin and NASA breathed life into the next Orion crew module when they powered up the spacecraft for the first time at the Kennedy Space Center, Florida. Designed for human spaceflight, this Orion will be the first to fly more than 60,000 km beyond the Moon during its nearly three-week EM-1 (Exploration Mission-1), a feat that hasn't been possible before. 72) 73)
- "Orion was designed from the beginning to take humanity farther into space than we've ever gone, and to do this, its systems have to be very robust and reliable," said Mike Hawes, vice president and Orion program manager at Lockheed Martin. "Over the last year, we've built great momentum in assembling the crew module for EM-1. Everyone on the team understands how crucial this test campaign is, and more importantly, what this spacecraft and mission means to our country and future human space flight."
- The initial power-on event was the first time the vehicle management computers and the power and data units were installed on the crew module, loaded with flight software and tested. Evaluating these core systems, thought of as the "brain and heart" of the Orion capsule, is the first step in testing all of the crew module subsystems.
- Although astronauts will not fly in this capsule on this flight, a large majority of the subsystems and avionics are the same design that astronauts will rely on during following missions with Orion into the solar system. Launching on NASA's Space Launch System — the most powerful rocket in the world — the EM-1 flight is critical to confirming the Orion spacecraft and all of its interdependent systems operate as designed in the unforgiving environment of deep space.
- With the successful initial power on behind them, engineers and technicians will now continue integrating the 55 components that make up the spacecraft avionics suite, connecting them with nearly 400 harnesses. Over the course of the next two to three months, as each system is installed, they will perform thorough functional tests to ensure Orion is ready to move to the all-important environmental testing phase.
NASA affirms existing plan for first mission of SLS, Orion
• May 12, 2017: NASA managers have ruled out putting a crew on board an Orion capsule atop the agency’s huge Space Launch System rocket for the gargantuan booster’s maiden flight in 2019, citing technical risks and higher costs, up to as much as $900 million, agency officials said at a news conference on May 12, 2017. 74) 75)
- In February 2017, the Trump administration asked NASA to look into the possibility of either adding a crew to the EM-1 (Exploration Mission 1), or moving up the launch of EM-2, the flight NASA already earmarked for the SLS (Space Launch System) booster’s first piloted mission. That flight is targeted for launch in the 2021 timeframe.76)
- The NASA study concluded that while it would be possible to upgrade the Orion spacecraft to accommodate a crew for the EM-1 flight — equipping it with life support systems, crew displays, a validated launch abort system and other critical elements — it would have required an additional $600 million to $900 million in funding. - And there would be additional technical risk and likely delays to accelerate software development and to retrofit the EM-1 Orion capsule to support a two-person crew.
- As a result, acting NASA Administrator Robert Lightfoot said agency managers and White House officials agreed it made more sense to stick with the original plan, launching an uncrewed Orion capsule atop the first SLS booster in 2019, followed by a piloted mission using an upgraded version of the rocket two years later.
- And so, NASA will stick with plans to launch a “Block 1” SLS rocket in 2019 to boost an unpiloted Orion capsule on a three-week flight beyond the moon and back to a high-speed reentry and ocean splashdown.
- The launch date recently slipped from late 2018 to 2019 — the exact date is TBD — because of a variety of factors, including manufacturing delays caused by recent tornado damage at the Michoud Assembly Facility near New Orleans where the SLS rocket is being built.
- In any case, EM-2, featuring an astronaut crew, would be launched atop a Block 1B SLS rocket in the late 2021 timeframe. Unlike the EM-1 rocket, the Block 1B version of the SLS would feature a more powerful, human-rated EUS (Exploration Upper Stage).
- The long-range plan is to use the SLS to send astronauts beyond the moon in the mid 2020s before eventual flights to Mars.
- The long gap between the SLS’s initial test flight and the piloted EM-2 mission, driven in large part by NASA’s budget and a variety of technical hurdles, has raised concerns in some quarters about maintaining public and congressional support in a program with years between flights and competing demands on agency funding.
- Lightfoot said there have been no discussions with the administration about near-term astronaut flights to Mars. Just getting EM-1 off the ground will be difficult enough. The Government Accountability Office concluded last summer that NASA will have spent some $23 billion through EM-1 developing the SLS rocket, the Orion capsule and ground infrastructure.
- Putting a crew aboard would have driven that cost even higher. “We needed additional funding, and we needed additional time,” said Bill Gerstenmaier, NASA’s director of space flight. “We knew both of those had to be there, because we had certain components that just were not there. We didn’t have crew displays, we didn’t have an active abort system, we didn’t have an active life support system. So we knew those had to get added in.”
- In its initial configuration, the SLS Block 1 rocket will be made up of two shuttle-heritage five-segment solid-fuel boosters provided by Orbital ATK and a huge Boeing-built first stage powered by four hydrogen-burning RS-25 space shuttle main engines provided by Aerojet Rocketdyne.
- The Block 1 version features an interim upper stage derived from Boeing’s Delta 4 rocket powered by a single hydrogen-fueled Aerojet Rocketdyne RL-10B2 engine. That upper stage is not currently human rated.
- The NASA study concluded that while it would be possible to upgrade the Orion spacecraft to accommodate a crew for the EM-1 flight — equipping it with life support systems, crew displays, a validated launch abort system and other critical elements — it would have required an additional $600 million to $900 million in funding. - And there would be additional technical risk and likely delays to accelerate software development and to retrofit the EM-1 Orion capsule to support a two-person crew.
• April 6, 2017: Curtiss-Wright's Defense Solutions division has successfully delivered eight of the nine data acquisition flight units that it is building for use on NASA's Orion spacecraft planned for use in EM-1 (Exploration Mission-1), Orion's second test flight in space. 77)
- For the Orion EM-1 flight, Curtiss-Wright supplies its MnACQ-2000 Miniature Network Data Acquisition System, a compact, stackable Fast Ethernet 100BASE-T-based networked encoding unit that processes and delivers packetized instrumentation data to designated network nodes. Each of the nine rugged COTS-based units built for Orion EM-1 includes a radiation tolerant power supply, system management overhead and the specific signal conditioning modules needed to address the number and type of measurements needed during flight.
- Two 12-Port Ethernet switches that tie the system together and route the data and video have also been delivered for the Orion EM-1 flight. Curtiss-Wright expects to deliver the ninth and final MnACQ-2000 by the end of June 2017.
• February 27, 2017: ESA’s contribution to NASA’s Orion spacecraft is the European Service Module, providing the spacecraft with its main power source and propulsion mechanism. Designed by Airbus Defence and Space and assembled by OHB Sweden, the Propulsion Qualification Model was shipped to the NASA’s White Sands facility in January. 78)
- The model is now set up and awaiting extensive testing by NASA, ESA and Airbus. Its 21 engines, including the Shuttle OMS (Orbital Maneuvering System) engine, eight auxiliary thrusters and 12 smaller thrusters will undergo ‘hot firing’, in which all engines will be ignited.

• February 16, 2017: Airbus DS has signed a new contract with ESA (European Space Agency) for the construction of the second European service module (ESM) for NASA’s Orion spacecraft. The contract is worth around € 200 million. The ESM is a key element of Orion, the next-generation spacecraft that will take astronauts beyond LEO (Low Earth Orbit) for the first time since the end of the Apollo program. 79)
• In mid-January 2017, Airbus Defence and Space delivered to NASA a propulsion test module for the Orion program. The PQM (Propulsion Qualification Test Model) will be used to check that the Orion ESM (European Service Module) spacecraft’s propulsion subsystem functions correctly. On behalf of ESA, Airbus DS is the prime contractor for the ESM, a key element of NASA’s next generation Orion spacecraft. 80)
- Although the PQM will never see space, this is an important step in the development of the Orion program. Complex systems for human spaceflight must first be tested and qualified on Earth before being used as flight hardware in space. The engineers want to determine how the system behaves in different environments, to ensure that it functions properly.
- The test module is travelling via Bremerhaven and Houston / USA to its final destination at NASA’s WSTF (White Sands Test Facility) near Las Cruces in New Mexico / USA. Arrival is expected mid-February. The tests will take place later in the year at WSTF for the qualification of Orion ESM’s propulsion subsystem.
• On December 12, 2016, ESA handed over ownership of the Orion European Service Module test article to NASA at the agency’s Plum Brook facility in Sandusky, Ohio – marking the end of individual testing for the structure. 81)
- The module sits directly below Orion’s crew capsule and provides propulsion, power, thermal control, and water and air for four astronauts. The solar array spans 19 m and provides enough electricity to power two households.
- From a design perspective, the launch is one of the most demanding moments in a mission. Orion will sit atop the SLS (Space Launch System) and more than 2500 tons of propellant. The vibrations and forces are intense until they reach the relative calm of space.
- To ensure the service module can withstand these forces, it is placed on a large table that shakes and moves to recreate the vibrations of launch. Almost 1000 sensors monitor how the 35 ton spacecraft flexes and withstands the stress. The blue wires carry the data during the tests for later analysis.
- The tests are running smoothly and the first flight model is already being built in Bremen, Germany. It will be shipped to the USA next year for more testing and final integration ahead of launch at the end of 2018.
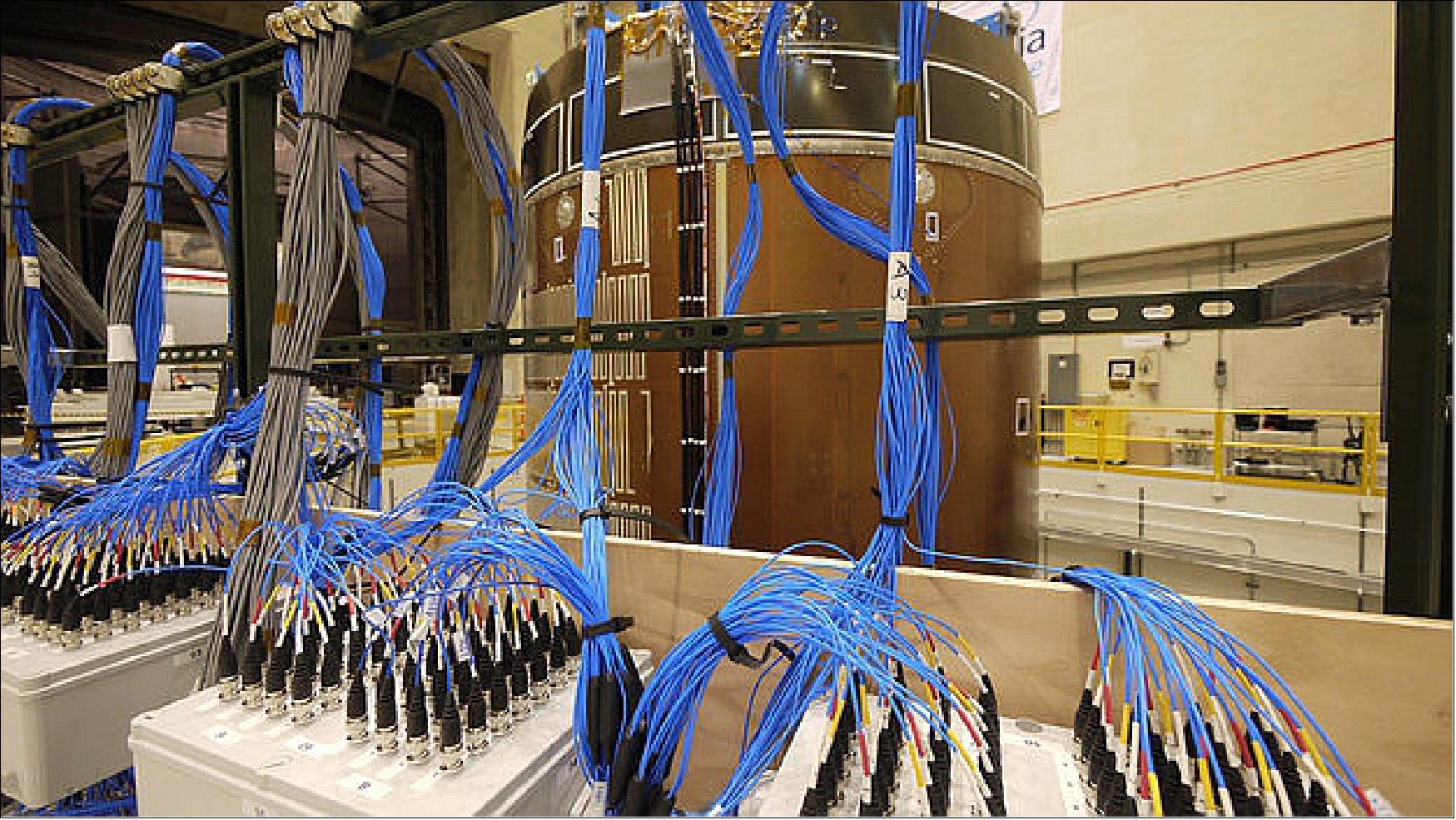
• January 2, 2017: A former space shuttle OMS-E (Orbital Maneuvering System-Engine) has been delivered to Germany for attachment to the European-built service module destined to steer NASA’s next Orion spacecraft (EM-1) on a course around the moon on an uncrewed test flight in late 2018. 82)
- The engine was refurbished and reassembled at NASA’s White Sands Test Facility in New Mexico, then shipped to Johnson Space Center in Houston for shake testing and returned to White Sands for leak tests, according to an ESA (European Space Agency) blog post. 83)
- It flew from Dallas/Fort Worth International Airport to Frankfurt last month, and then continued its journey by truck to Airbus Defense and Space’s spacecraft assembly facility in Bremen, Germany, ESA said.
- ESA is providing the service modules for at least the next two Orion missions — an unpiloted shakedown cruise in lunar orbit scheduled to lift off in November 2018, and the first Orion flight with astronauts on-board in the early 2020s.
- European governments agreed to pay for the service module for the 2018 flight, named EM-1 (Exploration Mission-1), at a meeting of government ministers in December 2012. ESA member states last month committed funding for a second service module for EM-2 (Exploration Mission-2), which will carry up to four astronauts farther than the moon’s orbit as soon as 2021.

- The service module has 33 engines and thrusters to control the Orion capsule’s orientation and adjust its trajectory after launch. The main engine for EM-1 is a refurbished OMS-E (Orbital Maneuvering System-Engine) that flew on 19 space shuttle missions.
- The OMS engines were mounted on pods on each side of the shuttle’s vertical tail, used to change the craft’s orbit and begin the spaceship’s trip back to Earth with a de-orbit burn.
- The ESM (European Service Module) has 33 engines and thrusters to control the Orion capsule’s orientation and adjust its trajectory after launch. The main engine for EM-1 is a refurbished Orbital Maneuvering System engine that flew on 19 space shuttle missions (Figure 71).
- The OMS engines were mounted on pods on each side of the Shuttle’s vertical tail, used to change the craft’s orbit and begin the spaceship’s trip back to Earth with a de-orbit burn. - The engines burn hydrazine and nitrogen tetroxide propellants, and were each designed for 100 missions and rated for multiple restarts on each flight. Aerojet Rocketdyne built the OMS engines, which provide around 26.6 kN of thrust in vacuum.
- The OMS engine slated to launch on EM-1 flew on the shuttle Challenger, Discovery and Atlantis in its career. Its first launch was on the STS-41G mission in October 1984, and its last shuttle mission was STS-112 in October 2002.

- The European-built service module is in the “critical path” for EM-1 to remain on track for its launch readiness window, which runs from September through November of 2018. The service module is due for delivery to NASA/KSC (Kennedy Space Center) in Florida in April 2017 — after engineers in Germany add the OMS engine and propellant tanks to the already-finished primary structure.
- At KSC, ground crews will connect the service module with the Orion crew module, then ship the spacecraft to NASA’s Plum Brook Station in Ohio by the end of 2017 to subject it to the extreme temperatures and vacuum conditions it will encounter in space.
- The craft will return to KSC in early 2018 for final assembly steps, including the spacecraft’s fueling and the addition of the Orion launch abort system before the stack is mounted on top of NASA’s SLS (Space Launch System) inside the Vehicle Assembly Building for rollout to launch pad 39B.
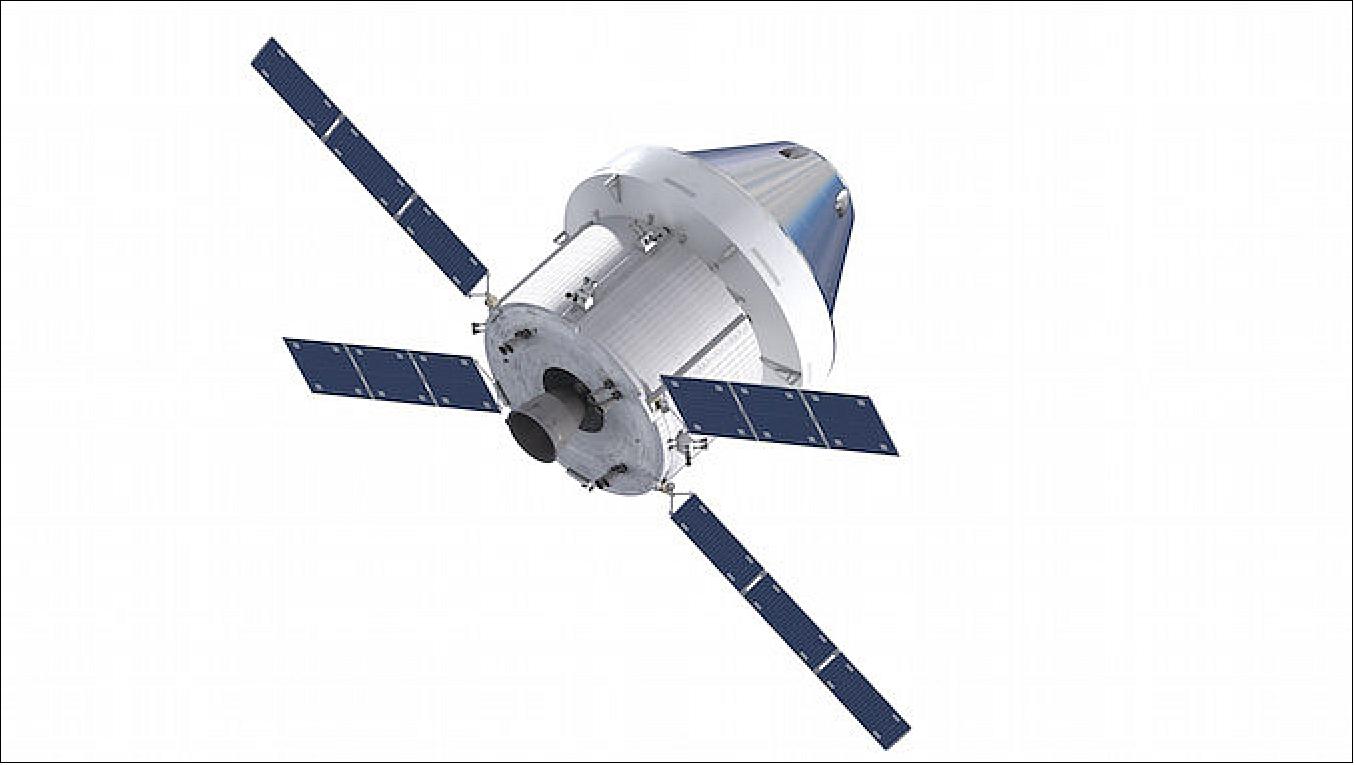
• December 7, 2016: ESA and NASA are extending their collaboration in human space exploration following confirmation that Europe will supply a second Service Module to support the first crewed mission (EM-2)of the Orion spacecraft. The mission is set for launch from NASA’s Kennedy Space Center in Florida, USA, as early as 2021 and will include up to four astronauts – the first time humans have left low orbit since 1972. Crew size and composition will be determined closer to launch. 84)
• Nov. 21, 2016: The processing activity at NASA/KSC (Kennedy Space Center) in Florida has ramped up in preparation for the agency’s launch of the Orion spacecraft atop the SLS (Space Launch System) rocket on its first deep space mission, Exploration Mission 1 (EM-1). The Orion CMA (Crew Module Adapter) for EM-1 was lifted for the first and only time, Nov. 11, during its processing flow inside the Neil Armstrong Operations and Checkout (O&C) Building high bay at KSC. 85)
- The CMA will connect the Orion crew module to the European Space Agency-provided service module. The Orion spacecraft will launch on the SLS rocket on EM-1 scheduled for late 2019.

• Sept. 19, 2016: The Orion heat shield that will protect the Orion crew module during re-entry after the spacecraft’s first uncrewed flight atop NASA’s Space Launch System rocket in 2018 arrived at the agency’s Kennedy Space Center in Florida on on August 25. It was transported to the Shuttle Landing Facility, which is managed and operated by Space Florida, aboard NASA’s Super Guppy aircraft. 86)
- The shipping container with the heat shield inside was offloaded and transported to the Neil Armstrong Operations and Checkout (O&C) Building high bay where technicians uncrated and secured it on a stand to begin the work to prepare it for Orion’s next test flight, known as EM-1 (Exploration Mission-1).
- The heat shield was designed and manufactured by Lockheed Martin in the company’s facility near Denver. Orion’s heat shield will be capable of withstanding temperatures of up to 2750ºC during reentry into Earth atmosphere. The heat shield measures 5 m in diameter, making it the largest of its kind.

• June 27, 2016: NASA and ESA conducted a CDR (Critical Design Review) culminating in a final review board June 16 for Orion’s European-built service module (Figure 75). The service module is an essential part of the spacecraft that will power, propel, and cool Orion in deep space as well as provide air and water for crew members. The CDR rounds out the latest in a series of reviews for the three human exploration systems development programs that will enable the journey to Mars. 87)
- The recently completed review focused on the overall service module design while discussing differences between Orion’s first deep space mission atop the SLS (Space Launch System) rocket and the mission to follow that will carry crew. No new major issues were identified during the review, and the teams worked together to develop a plan for work going forward in areas such as power, solar array management and propellant usage.
- “The teams at NASA and ESA worked together successfully over the past few weeks to bring design decisions and required products to the CDR board,” said William Gerstenmaier, associate administrator for NASA’s Human Exploration and Operations Mission Directorate. “International collaboration is an important part of the effort NASA is leading to pioneer deep space.”
- The review was conducted at ESA/ESTEC (European Space Research and Technology Center) in Noordwijk, the Netherlands with teams from NASA, ESA, Lockheed Martin and Airbus Defence & Space in Bremen, Germany. Lockheed Martin is NASA’s main contractor building Orion, and Airbus is ESA’s contractor for the service module.
- The CDR identified April 2017 as the target for the service module delivery to Kennedy Space Center in Florida. Teams will begin integrating hardware into the rocket before the service module is delivered, and NASA plans to continue to optimize processing when it arrives at Kennedy. Initial results maintain EM-1 launch date no later than November 2018.
• May 25, 2016: Replicating the thunderous noise of a rocket launch is no easy task, but engineers at NASA Glenn’s Plum Brook Station in Sandusky, Ohio are mimicking the launch environment the Orion spacecraft will experience on a 2018 mission beyond the moon. They recently concluded a series of tests on a structural representation of the Orion service module to help ensure it can withstand the force and pressure of the acoustics environment it will experience as it makes its way from the launch pad to space atop NASA’s Space Launch System rocket. 88)
- Orion’s service module is a critical piece of the overall spacecraft. Provided by ESA (European Space Agency) and built by Airbus Defence & Space, the 13 ton component will be responsible for propelling, powering and cooling the vehicle, as well as providing air and water for its eventual crew.
- When a powerful rocket launches, it can produce noise of up to 180 decibels, levels so high that it can vibrate and damage spacecraft components if they aren’t designed and built to be strong enough to withstand the environment. For comparison, a person standing about 100 m away from a jet taking off would experience approximately 130 decibels of sound pressure, and for every additional 10 decibels, sound intensity increases 10-fold.
- While engineers have designed Orion components to endure a range of harsh environments like launch and missions in space, testing on the ground helps to validate computer modeling predictions. “Orion is undertaking an unprecedented mission, so the acoustics testing we’ve done is helping us make sure the service module will fare as we expect it to,” said Aron Hozman, lead engineer for the acoustics testing campaign.
- Engineers performed numerous evaluations at different decibel levels over the course of several weeks in Plum Brook Station’s Reverberant Acoustic Test Facility. The facility is the world’s most powerful spacecraft acoustic test chamber. In it, a series of modulators or horns embedded on one of the facility’s walls and supporting subsystems such as a gaseous nitrogen generation system and a hydraulic supply system were used to modulate noise and produce a wide range of acoustic spectra.
- The series of testing was done in two configurations – one with “wet” tanks where the service module’s propellant tanks were filled with a simulant that modeled the density of Orion fuel, and with them empty to determine if the noise affected the structure differently. The maximum test with fuel simulant lasted approximately three minutes. Engineers also used the testing to help qualify the service module’s solar array wing. They placed a microphone inside the test article and determined that the noise in the test chamber matched the expected acoustic environment inside the service module where the wing is housed.
- The service module structural test article will next move to Plum Brook Station’s Mechanical Vibration Facility, a powerful spacecraft shaker system that will help assess the component’s ability to withstand the tremor that an SLS launch will produce. As these ground tests continue to validate the service module’s design, the first flight unit service module for EM-1 is now being built in Europe. This unit, which will be built by the same teams who built the structural test article, recently arrived to Airbus’ facility in Bremen, Germany for integration. It is expected to be shipped to the United States in 2017.
• May 19, 2016: Airbus DS has started assembling the ESM (European Service Module), a key element of NASA’s next-generation Orion spacecraft that will transport astronauts into deep space for the first time since the end of the Apollo program. Integrating more than 20,000 parts and components in the ESM flight model ranging from electrical equipment to rocket engines, solar arrays, tanks for propellant and life support consumables as well as hundreds of meters of cables and tubes marks a major milestone for the Orion program. After the arrival of the flight model structure from Thales Alenia Space Italy the assembly is being carried out at Airbus Defence and Space’s site at Bremen, Germany, where officials from ESA, NASA, Airbus Defence and Space and partners gave an update on the Orion program’s progress on May 19. 89)
- The ESM is cylindrical in shape and about four meters in diameter and in height. It features the ATV’s (Automated Transfer Vehicle) distinctive four-wing solar array (19 m across unfurled) that generates enough electricity to power two households. Its 8.6 tons of propellant will power one main engine and 32 smaller thrusters. The ESM has a total mass of just over 13 tons. In addition to the main propulsion capability for the Orion spacecraft, the ESM will perform orbital maneuvering and attitude control functions. It also provides the main elements of the life support system such as water and oxygen for the crew while providing power and thermal control while it is docked to the crew module. The unpressurized service module can also be used to carry additional cargo.
• May 11, 2016: The EM-1 has passed a critical series of proof pressure tests which confirm the effectiveness of the welds holding the spacecraft structure together. Lockheed Martin, the manufacturer of the Orion crew module, ran the test at incremental steps over two days to reach the maximum pressure. During each step, the team pressurized the chamber and then evaluated the data to identify changes for the next test parameter. The results revealed the workmanship of the crew module pressure vessel welds and how the welds reacted to the stresses from the pressurization. 90)
• April 29, 2016: The first European hardware to arrive at NASA for Orion is the ESM (European Service Module) structural test article. This test version of the service module has the same mass and configuration as the real thing and will undergo advanced testing at NASA’s Plum Brook Station in Ohio, USA. 91)

• On 29 February 2016, a test model of Orion’s solar array was unfolded at NASA’s Plum Brook Station test facility in Sandusky, Ohio to check everything works as expected. The solar panels were made by Airbus Defence and Space in the Netherlands for the ESA module that will supply power and life support for up to four astronauts. 92)
- Each wing stretches more than 7 m, folded inside the SLS (Space Launch System's) rocket of NASA that will launch the spacecraft on its first unmanned mission in 2018. Orion sports four wings of three panels with 1242 cells per panel to provide 11.1 kW of power – enough to run two typical European households. The distinctive X-wings are an evolution and improvement of ESA’s ATV (Automated Transfer Vehicle).
- The test was passed with flying colors as the 260 kg array unfurled into its flight configuration. The stresses of flying to the Moon and beyond – and back again – mean the array is designed to bend up to 60º forward and backward, much like a bird in flight.

• Feb. 2. 2016: NASA’s unique Super Guppy aircraft, loaded with the structural backbone for NASA’s next Orion crew module, swooped in for a landing at the KSC (Kennedy Space Center) on Feb. 1, 2016 (coming from NASA’s Michoud Assembly Facility in New Orleans). Orion’s arrival at KSC marks a major milestone on the road to starting NASA’s ‘Journey to Mars’ initiative. 93)
- This Lunar Orion vehicle is destined for blastoff to the Moon in 2018 on NASA’s EM-1 (Exploration Mission-1) atop the agency’s mammoth SLS (Space Launch System) rocket. EM-1 is a ‘proving ground’ mission that will fly an unmanned Orion thousands of kilometers beyond the Moon, further than any human capable vehicle, and back to Earth, over the course of a three-week mission.

• January 22, 2016: The first European hardware to arrive at NASA for Orion is the European Service Module structural test article (Figure 78). This test version of the service module has the same weight and configuration as the real thing and will undergo advanced testing at NASA’s Plum Brook Station in Ohio, USA. Once mating is complete the Service Module will have a mass of 13,000 kg in total. The Service Module will be placed on a shaker and vibrated to recreate the stress of launch. 94)

• January 2016: In a major step towards flight, engineers at NASA’s Michoud Assembly Facility in New Orleans have finished welding together the pressure vessel for the first Lunar Orion crew module that will blastoff in 2018 atop the agency’s SLS (Space Launch System) rocket. The 2018 launch of NASA’s Orion on an unpiloted flight dubbed Exploration Mission, or EM-1, counts as the first joint flight of SLS and Orion, and the first flight of a human rated spacecraft to deep space since the Apollo Moon landing era ended more than 4 decades ago. 95)
- The friction-stir welding work to assemble the primary structure of NASA’s maiden Lunar Orion capsule was just finished last week on Jan. 13. According to NASA, friction-stir welding produces incredibly strong bonds by transforming metals from a solid into a plastic-like state, and then using a rotating pin tool to soften, stir and forge a bond between two metal components to form a uniform welded joint, a vital requirement of next-generation space hardware.

• Nov. 16, 2015: After the completion of Orion’s CDR (Critical Design Review) in October, the spacecraft is one important step closer toward the upcoming EM-1 (Exploration Mission-1, scheduled to take place in 2018. It means that Lockheed Martin, the prime contractor building Orion, can now focus on full-scale fabrication, assembly, integration and tests of the spacecraft. 96)
• Nov. 10, 2015: A test version of ESA’s service module for NASA’s Orion spacecraft arrived at the Cleveland Hopkins airport in Ohio, USA before continuing by road to NASA’s Plum Brook Station. 97) 98) 99)
- The module sits directly below Orion’s crew capsule and provides propulsion, power, thermal control, and water and air for four astronauts. The solar array spans 19 m and provides enough to power two households. A little over 5 m in diameter and 4 m high, it weighs 13.5 tons. The 8.6 tons of propellant will power one main engine and 32 smaller thrusters.
- Following initial tests in Europe, it will now undergo rigorous vibration tests in NASA’s Plum Brook Station in Ohio to ensure the structure and components can withstand the extreme stresses during launch.
• Nov. 6, 2015: Airbus Defence and Space is preparing to deliver the Orion ESM (European Service Module) structural test model to NASA. The model is an exact copy of the flight model, only without the functionality. It will determine whether the structural and weight specifications have been met, and whether the module lives up to NASA’s crew safety requirements. Testing will take place at NASA’s Plum Brook Station test center in Ohio, USA. 100)
- The design of the ESM is based on the ATV (Automated Transfer Vehicle), the European supply craft for the International Space Station. It is a cylindrical module with a diameter of 4.5 m and a total length – main engine excluded – of 2.7 m. It is fitted with four solar array ‘wings’ with a span of 18.8 m. Besides propulsion and power, the ESM is also equipped with oxygen tanks to supply the crew.
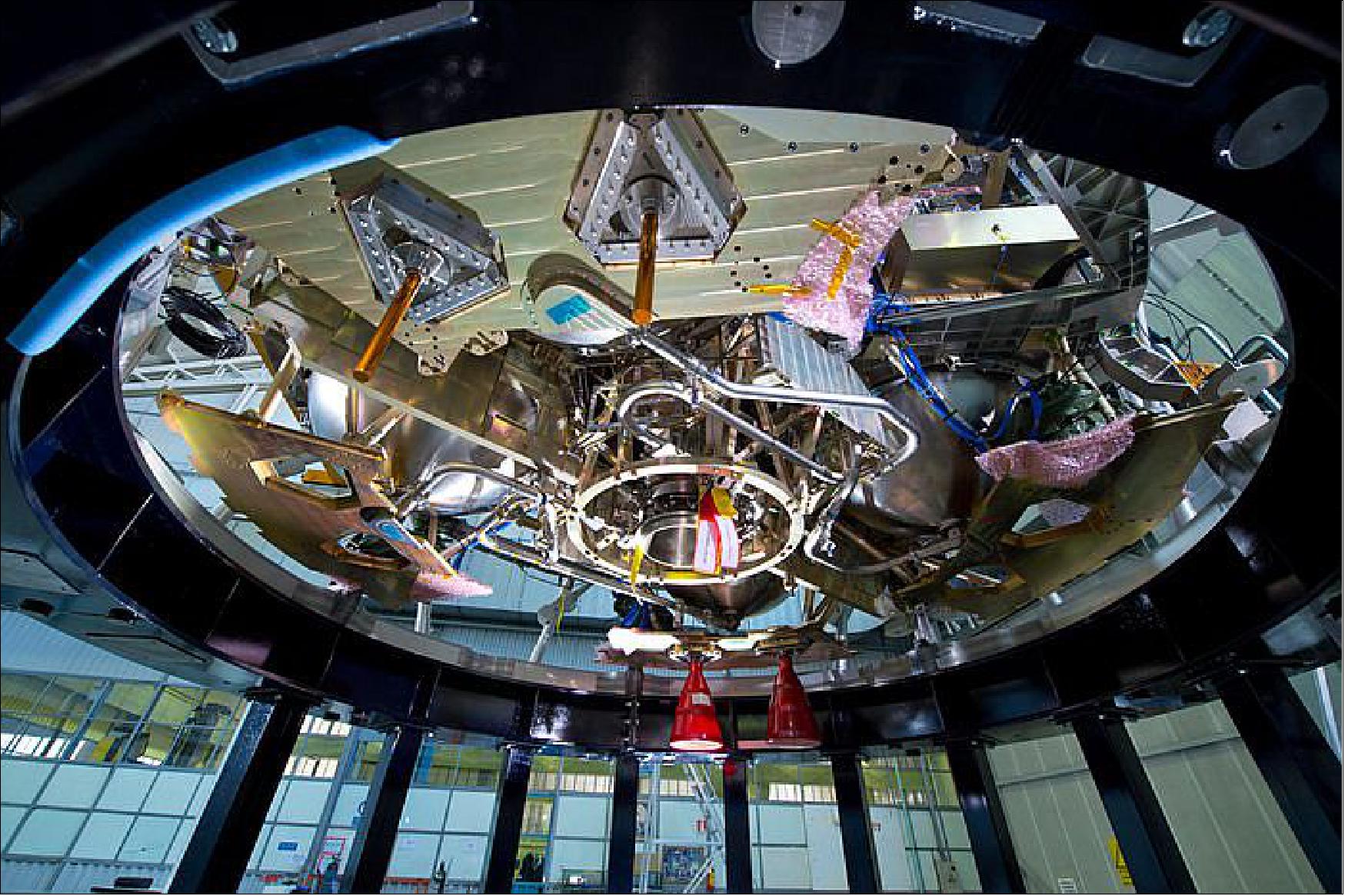
• Oct. 26, 2015: Lockheed Martin and NASA have completed the majority of Orion’s CDR (Critical Design Review) which means the spacecraft’s design is mature enough to move into full-scale fabrication, assembly, integration and test of the vehicle. It also means that the program is on track to complete the spacecraft’s development to meet NASA’s Exploration Mission-1 (EM-1) performance requirements. The complete Orion EM-1 CDR process will conclude after the European Service Module CDR and a presentation to the NASA Agency Program Management Council in the spring 2016. 101) 102)
- Orion’s CDR kicked off in August 2015. The review focused on the EM-1 design as well as additional common elements that will be included on the Exploration Mission-2 (EM-2) spacecraft. These elements include the structure, pyrotechnics, LAS (Launch Abort System), software, guidance, navigation and control, and many others.
- Although the EM-1 vehicle is designed to accommodate all the necessary elements for human exploration of deep space, systems unique to the EM-2 mission, such as crew displays and the Environmental Control and Life Support System, will be evaluated at a later EM-2 CDR.
- In early 2016, Orion’s crew module pressure vessel will be shipped to the Operations and Checkout Facility at NASA’s Kennedy Space Center. There it will undergo final assembly, integration and testing in order to prepare for EM-1 when Orion is launched atop NASA’s SLS (Space Launch System) for the first time.
• Oct. 22, 2015: NASA completes the CDR (Critical design Review) for SLS (Space Launch System). The CDR examined the first of three configurations planned for the rocket, referred to as SLS Block 1. The Block I configuration will have a minimum 70-metric-ton (77-ton) lift capability and be powered by twin boosters and four RS-25 engines. The next planned upgrade of SLS, Block 1B, would use a more powerful exploration upper stage for more ambitious missions with a 105-metric-ton (115-ton) lift capacity. Block 2 will add a pair of advanced solid or liquid propellant boosters to provide a 130-metric-ton (143-ton) lift capacity. In each configuration, SLS will continue to use the same core stage and four RS-25 engines. 103)
• Oct. 12, 2015: Aerojet Rocketdyne announced that it passed the CDR (Critical Design Review) for the jettison motor and the crew module RCS (Reaction Control System) on the Orion spacecraft. These two major subsystems that Aerojet Rocketdyne is building for Lockheed Martin and NASA are critical for ensuring astronaut safety and mission success. Astronaut safety is paramount and the jettison motor and the crew module reaction control system will ensure that the crew begins their mission into deep space and lands at the completion without harm. 104)
- The jettison motor is a solid rocket motor that separates the launch abort system from the Orion spacecraft about five seconds after fairing separation, allowing the crew to continue safely on their way into deep space. In addition to its normal operations, the jettison motor serves a double duty if an anomaly occurs. Designed to assist crew escape, the jettison motor is one of three solid rocket motors on the launch abort system that will rapidly pull the capsule away from the stack in the event of an emergency.
- The RCS on the crew module the company is providing for Orion is equally important to crew safety. The crew module RCS provides the only course control authority after separation from the service module. It ensures that the heat shield is properly oriented, the crew module is stable under the parachutes and that the vehicle is in the correct orientation for splashdown.
• NASA is a small step closer to sending astronauts on a journey to Mars. On Sept. 5, 2015, engineers at the agency’s MAF (Michoud Assembly Facility) in New Orleans welded together the first two segments of the Orion crew module that will fly atop NASA’s SLS (Space Launch System) rocket on a mission beyond the far side of the moon. 105)

The primary structure of Orion’s crew module is made of seven large aluminum pieces that must be welded together in detailed fashion (Figure 82). The first weld connects the tunnel to the forward bulkhead, which is at the top of the spacecraft and houses many of Orion’s critical systems, such as the parachutes that deploy during reentry. Orion’s tunnel, with a docking hatch, will allow crews to move between the crew module and other spacecraft.
“Each of Orion’s systems and subsystems is assembled or integrated onto the primary structure, so starting to weld the underlying elements together is a critical first manufacturing step,” said Mark Geyer, Orion Program manager. “The team has done tremendous work to get to this point and to ensure we have a sound building block for the rest of Orion’s systems.”
Engineers have undertaken a meticulous process to prepare for welding. They have cleaned the segments, coated them with a protective chemical and primed them. They then outfitted each element with strain gages and wiring to monitor the metal during the fabrication process. Prior to beginning work on the pieces destined for space, technicians practiced their process, refined their techniques and ensured proper tooling configurations by welding together a pathfinder, a full-scale version of the current spacecraft design.
NASA’s prime contractor for the spacecraft, Lockheed Martin, is doing the production of the crew module at Michoud.
Through collaborations across design and manufacturing, the teams have been able to reduce the number of welds for the crew module by more than half since the first test version of Orion’s primary structure was constructed and flown on the EFT-1 (Exploration Flight Test-1) in December 2014. The EM-1 (Exploration Mission-1) structure will include just seven main welds, plus several smaller welds for start and stop holes left by welding tools. Fewer welds will result in a lighter spacecraft.
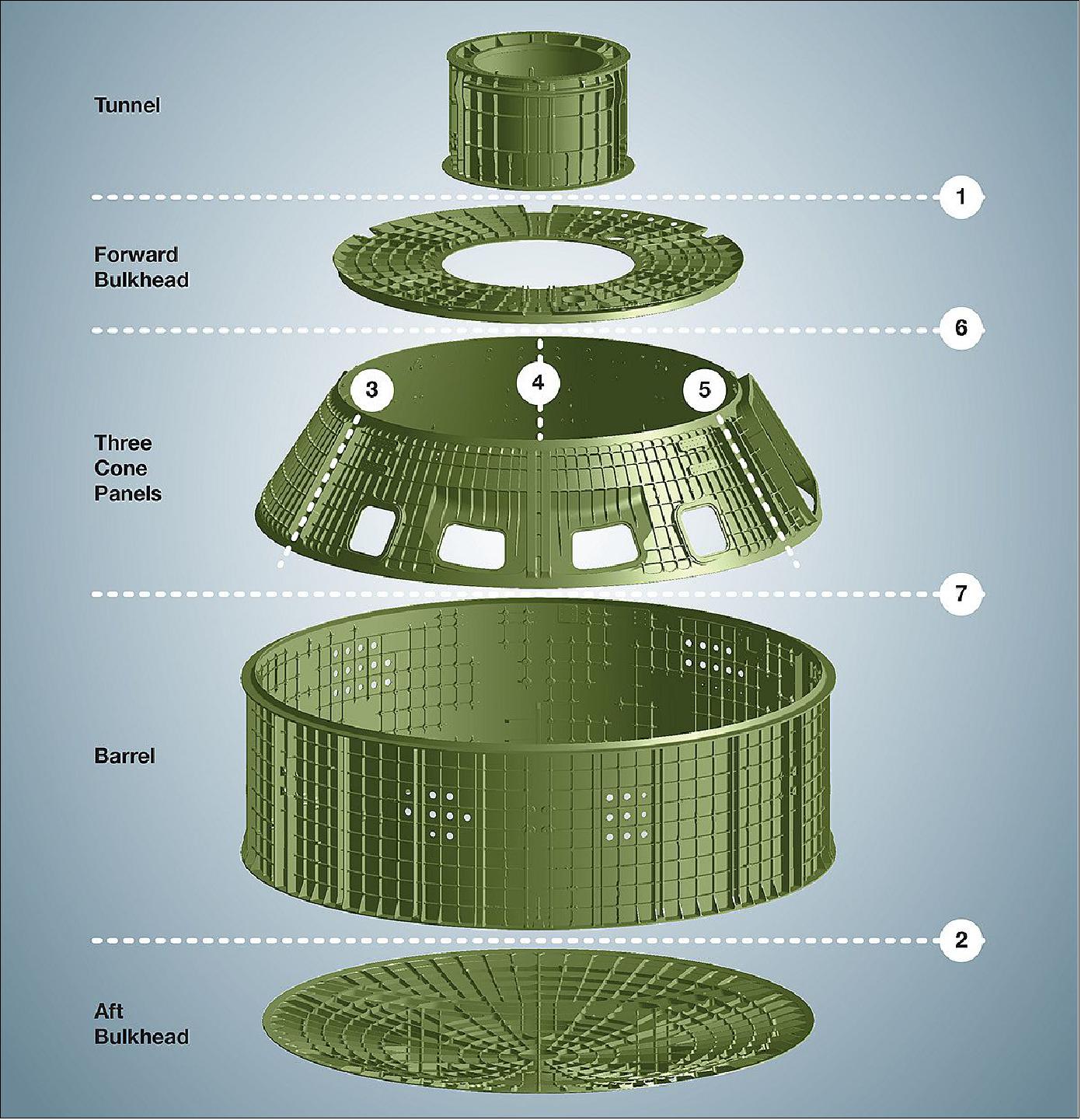
The tunnel is the passageway astronauts crawl in and out of when Orion is docked with another vehicle. The forward bulkhead, located at the top of the crew module, must handle extreme loads during re-entry because that is where the parachutes are connected when they deploy. In order to certify the new welding process, the team at Michoud Assembly Facility welded a pathfinder vehicle to verify the design changes and welding changes would perform as expected. 106)
In early 2016, once the pieces that make up the crew module’s pressure vessel are welded together, it will be shipped to the Operations and Checkout Facility at NASA’s Kennedy Space Center. There it will undergo final assembly, integration and testing in order to prepare for Exploration Mission-1 when Orion is launched atop NASA’s SLS (Space Launch System) for the first time. The test flight will send Orion into lunar distant retrograde orbit—a wide orbit around the moon that is farther from Earth than any human-rated spacecraft has ever traveled. The mission will last more than 20 days and will certify the design and safety of Orion and SLS for human-rated exploration missions.
- The timing of the Artemis 1 launch will also affect the schedule for Artemis 2, the first flight with astronauts on board. The Orion spacecraft on Artemis 2 will reuse avionics flown on the Orion for Artemis 1. “This puts this iron bar of, I’ll say, 20, 21 months between the missions,” said Jim Free, NASA associate administrator for exploration systems development, in an Oct. 13 talk at the American Astronautical Society’s Wernher von Braun Memorial Symposium in Huntsville, Alabama. That means Artemis 2 could not launch any earlier than 20 to 21 months after Artemis 1, or late 2023 assuming a February 2022 launch.
- Agency officials on the call said the schedule for Artemis 2 remains uncertain. Whitmeyer noted an independent schedule assessment of that mission will be released in “a matter of weeks” that will answer questions about its timing.
- “We’ve got a whole bunch of stuff that we’ve got to do with that crew capsule to get it ready for flight, so we look at the totality of all the different things,” he said. “I don’t think any one thing is the thing that really drives the schedule.”
Payloads
January 5, 2022: Amazon’s Alexa to be tested on Artemis 1. The upcoming uncrewed test flight of the Orion spacecraft will include a payload to see how a voice recognition technology widely available to consumers today could be used to assist astronauts on future missions. 107)
Lockheed Martin announced Jan. 5 that it has been working with Amazon and Cisco on a project called Callisto that will be flown on the Artemis 1 mission launching no earlier than March. Callisto is a demonstration to see how Amazon’s Alexa technology and Cisco’s Webex teleconferencing platform could be used on future crewed missions.
Callisto would allow astronauts to use voice commands to access data, adjust spacecraft controls and interact with teams on the ground. “We want to show that this type of technology can help astronauts with some of those unique human interface technologies, making their jobs simpler, safer, more efficient,” said Rob Chambers, director of commercial civil space strategy at Lockheed Martin, in an interview.
One application of the system would be for astronauts to ask Callisto to access and analyze spacecraft telemetry. “We’re drowning in data and starving for information,” he said. “One way you’ll be able to do this with the Callisto payload is to say, ‘Alexa, what is the average temperature across all the batteries, and what is the peak temperature?’ It’ll perform that data processing for you.”
Callisto can also control lighting and displays inside the spacecraft, or start diagnostic tests of spacecraft systems. With Webex, the system can exchange data and support collaborations like “whiteboarding” with teams on the ground. “These would be invaluable tools if I was on board as an engineer trying to understand what might be working or not working well,” he said.
The system uses a version of the same Alexa technology available for consumers. “Our engineers have done a bunch of incredible work with the teams at Lockheed Martin and Cisco to ensure that Alexa can work well in this very challenging environment,” said Aaron Rubenson, vice president of Amazon Alexa. That includes limited internet access available on Orion and the different acoustics of the capsule’s interior.
Rubenson said Callisto is programmed to respond to thousands of phases or “utterances” that it can process locally. It will determine if it can handle the queries itself or needs to transmit them to the ground.
The companies have tested Callisto extensively in simulators and are confident it’s ready to fly in space. “There’s nothing like real life where you have to conduct the switching that needs to happen, and deal with the latency and the packet loss,” said Jeetu Patel, executive vice president and general manager of security and collaboration at Cisco. “There’s nothing that can substitute that.”
Callisto was developed by the companies using their own funding. Chambers said Lockheed signed a reimbursable Space Act Agreement with NASA in late 2018 to support testing and inclusion of the technology on Artemis 1, paying for all the costs associated with that work.
Since Artemis 1 is an uncrewed mission, there will be no one on board to speak to Callisto. Chambers said “virtual crew members” in a backroom of mission control will issue commands to Callisto, with a variety of cameras inside Orion monitoring that work.
There are no plans for now, he added, to use Callisto on future Artemis missions or other spacecraft, pending how well the technology works on Artemis 1. “This is all about testing it on this flight, seeing if it’s valuable, and then we can assess how it can be used as we move forward not just on Orion but on habitats, at Gateway, rovers, and any number of other applications we’re actively looking at.”
Using Alexa in space would, in some respects, bring the technology full circle. Rubenson said that Amazon’s development of Alexa was inspired by the computers on the “Star Trek” television series, which responded to voice commands from the starship’s crew.
“We envision a future where astronauts can turn to an onboard AI for information, for assistance in doing their jobs in simpler and more efficient ways, and also, ultimately, for companionship,” he said. “Callisto is an opportunity for us to test that theory and explore how voice technology and AI can be helpful and potentially help support future crewed missions.”
Radiation Payloads
MARE (Matroshka AstroRad Radiation Experiment)
Future long duration Exploration missions require renewed efforts to adequately mitigate risks of crew health effects due to radiation exposure. Orion is NASA's next generation human Exploration spacecraft. Radiation protection constitutes a design driver for Orion. During the spacecraft development process, Lockheed Martin has proactively pursued radiation protection approaches in compliance with the ALARA (As low as reasonably achievable) principle. A collaborative effort with StemRad Ltd, Tel Aviv, Israel, resulted in the development of personal protective equipment for astronauts, the AstroRad. AstroRad provides customizable protection focused on stem cell rich organs and tissues. Orion's first test flight beyond Earth orbit (BEO) is Exploration Mission 1 (EM-1). 108)
MARE, an EM-1 international radiation science payload, has been proposed by the German Aerospace Center (DLR) and the Israel Space Agency (ISA) as an Orion science payload, approved by NASA, and in May 2017 was manifested on the EM-1 flight. In the past year, significant progress towards AstroRad customization, active detector development, and integration for MARE has been accomplished. The experiment is scheduled to be sent to the Moon and back on the Orion spacecraft in 2020 in collaboration with NASA. This innovative mission aims to collect data on the deep space radiation to which the human body is exposed during a voyage to the Moon, and at the same time test a radiation protection vest. 109) 110)
The spacecraft will carry two DLR measurement bodies, called the Matroshka Phantoms (test dummies). They are identical and are both fitted with more than 1400 active and passive sensors spread across their exterior and interior to acquire data on the effects of cosmic radiation on the bodies' interior and organs. During the flight, one of the phantoms will wear the AstroRad protective vest by StemRad, the industry partner from Israel. The other model will be exposed to the radiation without any protection whatsoever. 111)
The measurement bodies will be fitted with sensors and prepared for the space voyage at the DLR Institute of Aerospace Medicine in Cologne, where the data collected during the flight will be compared and evaluated on behalf of all partners and co-investigators. A number of DLR Matroshka phantoms have already travelled to space, but exclusively to the International Space Station ISS – so only in a near-Earth orbit. The MARE project will mark the first time that scientists collect data on radiation exposure beyond ISS orbit.
Experiment aims:
• To perform radiation measurements that help refine risk projections
- Skin- and internal body organs dosimetry
- During Van Allen belt transit & in cis-lunar space
- Intravehicular environment specific to Orion
• To validate the protection provided by AstroRad
• To expand the ISS Matroshka international participation heritage
• Trailblazer for science payloads on Orion
MARE Ground Rules:
• Phantoms will be installed inside the cabin at seat positions 3 and 4
- Phantom w/ AstroRad at position 3
- Representative of the nominal crew radiation environment on upcoming missions
• Payload is fully self-contained - no power and data interfaces from Orion
- Passive dosimeters: TLDs (Thermoluminescent Dosimeters), OSLDs (Optically Stimulated Luminescence Dosimeters), CR-39 PNTDs (Plastic-Nuclear Track Detectors)
- Battery powered active detectors with integrated data processing and recording
• Payload installation at L-15 days, post-flight removal at S+15 days (KSC)
• Payload must satisfy all vehicle safety requirements
• Mass and volume allocation.
CIRS (Computerized Imaging Reference Systems, Inc.) Radiation Phantom
• Made of tissue-equivalent material & containing human skeleton 112)
- Female Model
- 38 slices: 95 cm, 35 kg
- TLD holes in 3 cm grid over the phantom.
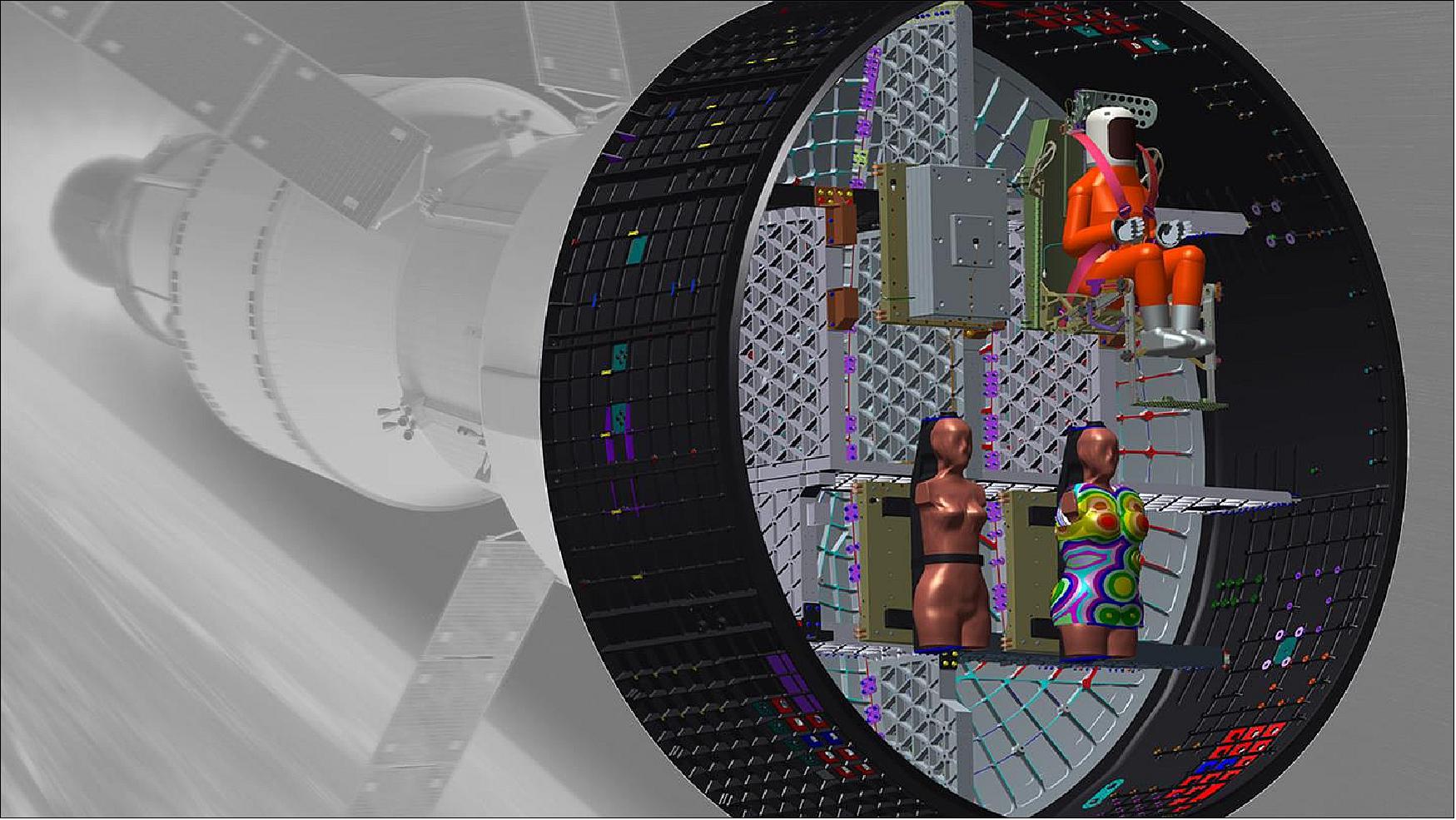
AstroRad Radiation Vest
• Developed by international collaboration between StemRad Ltd and Lockheed Martin SSC Advanced Programs
- Grant funding by MATIMOP and Space Florida
• Astronaut individually customizable personal protective equipment
- Designed using StemRad proprietary algorithms for selective shielding optimization focused on stem cell rich organs and tissues
- The manufacturing process leverages StemRad ground radiation protection expertise
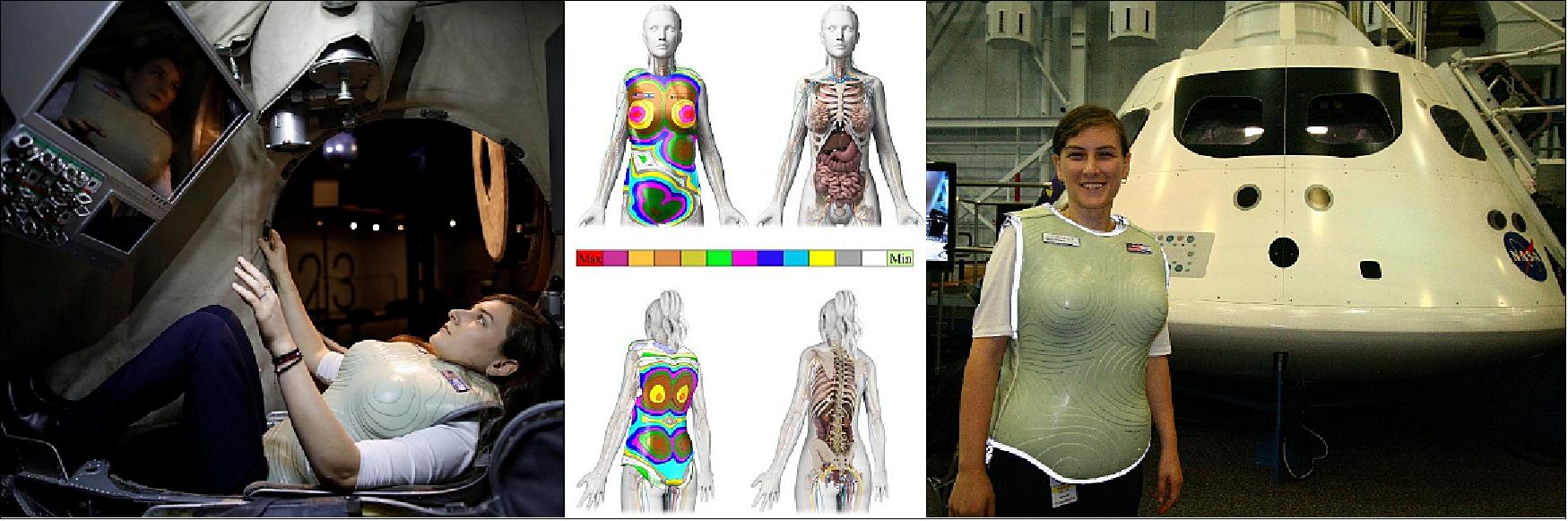
Commander Moonikin Campos
• The Moonikin is a male-bodied manikin previously used in Orion vibration tests. Campos will occupy the commander’s seat inside and wear an Orion Crew Survival System suit– the same spacesuit that Artemis astronauts will use during launch, entry, and other dynamic phases of their missions. 113)
- “Commander Moonikin Campos” is the official name of the manikin launching on Artemis I, NASA’s uncrewed flight test of the Space Launch System (SLS) rocket and Orion spacecraft around the Moon later this year. The Moonikin received its name as the result of a competitive bracket contest honoring NASA figures, programs, or astronomical objects. NASA received more than 300,000 votes.
- The name Campos is a dedication to Arturo Campos, a key player in bringing Apollo 13 safely back to Earth. The final bracket challenge was between Campos and Delos, a reference to the island where Apollo and Artemis were born, according to Greek mythology.
- “Our return to the Moon through Artemis is a global effort – and we’re always looking at new ways to engage the public in our missions. This contest, which is helping pave the way for a human return to the Moon, also honors an important individual in our NASA family – Arturo Campos,” said Brian Odom, NASA’s acting chief historian at Marshall Space Flight Center in Huntsville, Alabama. “It is a fitting tribute that the data gained from Artemis I will help us prepare to fly astronauts – including the first woman and first person of color – to the Moon, where we will get ready for Mars.”
- Campos will be equipped with two radiation sensors and have additional sensors under its headrest and behind its seat to record acceleration and vibration data throughout the mission. Data from the Moonikin’s experience will help NASA protect astronauts during Artemis II, the first mission in more than 50 years that will send crew around the Moon.
- The Moonikin is one of three “passengers” flying aboard Orion to test the spacecraft’s systems. Two female-bodied model human torsos, called phantoms, also will be aboard. “Zohar” and “Helga,” named by the Israel Space Agency (ISA) and the German Aerospace Center (DLR) respectively, will support the Matroshka AstroRad Radiation Experiment (MARE), an experiment to provide data on radiation levels during lunar missions.
- NASA’s SLS rocket and Orion spacecraft, along with a commercial human landing system and Gateway in lunar orbit, are vital to the agency’s deep space exploration plans. Working with commercial and international partners, NASA is committed to establishing the first long-term presence on and around the Moon under Artemis. Using robots and humans to explore more than ever before, NASA also will use the Moon for humanity’s next giant leap – sending the first astronauts to Mars.
Development
• February 13, 2020: As NASA leads the way for human exploration at the Moon and beyond, space radiation is one of the biggest hazards crews face. In 2018, NASA signed an agreement with the Israel Space Agency (ISA) and the German Aerospace Center (DLR) for an experiment to test the AstroRad radiation protection vest on Artemis I, the first flight test of the Space Launch System (SLS) rocket and Orion spacecraft. The investigation, called the Matroshka AstroRad Radiation Experiment (MARE), will provide valuable data on radiation levels during missions to the Moon while testing the effectiveness of the new vest. Artemis missions at the Moon will pave the way for human exploration of Mars. 114)
- Earth’s atmosphere and magnetic shielding protect us from most of the radiation in the universe, including radiation from our Sun. When astronauts leave Earth, they’re exposed to the full spectrum of radiation present in deep space. The Artemis I mission will not carry crew, but two identical mannequin torsos equipped with radiation detectors. They will fly aboard Orion during the three-week mission, traveling about 280,000 miles from Earth and thousands of miles beyond the Moon.
- The mannequins, called phantoms, are manufactured from materials that mimic human bones, soft tissues, and organs of an adult female. Their names are Helga and Zohar and, despite sharing the trip, their missions will be different – Zohar will wear the AstroRad vest, while Helga will not. Female forms were chosen because women typically have greater sensitivity to the effects of space radiation, but the AstroRad vest is designed to protect both men and women.
- The phantoms have a three-centimeter grid embedded throughout the torsos that will enable scientists to map internal radiation doses to areas of the body that contain critical organs. With two identical torsos, scientists will be able to determine how well the new vest might protect crew from solar radiation, while also collecting data on how much radiation astronauts might experience inside Orion on a lunar mission – conditions that cannot be recreated on Earth.
- The ISA will provide the AstroRad vest for the mission, which was developed by an Israeli company called StemRad in collaboration with Orion lead contractor, Lockheed Martin. The DLR will provide the phantoms and the majority of the radiation detectors, with further contributions by universities from around the world.

- In a related investigation currently underway on the International Space Station, the Comfort and Human Factors AstroRad Radiation Garment Evaluation (CHARGE) study will assess the ergonomics, range of motion, comfort and general user experience of the AstroRad vest in a microgravity environment. Insights from the study will help improve the fit and function of the vest.
- MARE builds upon previous experiments performed on the space station using phantoms and other instruments to measure radiation exposure in low-Earth orbit. Astronauts on station are exposed to radiation levels about 50 times higher than that experienced by people on Earth. Farther from Earth’s magnetic field and into interplanetary space, the level of radiation exposure during exploration missions could be much higher – up to 150 times more. Human beings exposed to large amounts of radiation can experience both acute and chronic health problems ranging from immediate radiation sickness to developing cancer in the future.
- Orion was designed to protect both humans and hardware during radiation events on Artemis missions. For example, in the event of a solar flare, Orion’s crew can take cover in the central part of the crew module, between the floor and the heat shield, using the stowage bags on board to improve shelter. However, the crew may have to stay in such a shelter for more than a day. With a protective vest to help block solar energetic particles, crew could continue working during critical mission activities in spite of a solar storm.
- Orion will also have different types of radiation sensors on board to record both the peak level of radiation exposure during the flight, as well as radiation levels throughout the mission. Researchers can then compare the data with mission telemetry to reveal where and when the radiation was encountered. While the AstroRad vest is designed primarily to protect against solar energetic particles that are ejected from the sun during a solar eruption, researchers are also developing and evaluating ways to shield crew from galactic cosmic rays, another type of radiation that comes from all over the galaxy and is more challenging to protect against.
- With the data from MARE and other sensors, NASA and its partners will improve their ability to prepare for, and limit the effects of, radiation exposure as human beings travel farther into space on longer missions. Reducing the risks due to radiation exposure is important for missions that could last as long as three months at the Gateway outpost in lunar orbit, and future missions to Mars, currently estimated to be a three year round-trip journey.
- NASA is working to land the first woman and next man on the Moon by 2024 as part of the agency’s Artemis program. Orion, the Space Launch System rocket and the Gateway are part of NASA’s backbone for deep space exploration. Through the agency’s broader Moon to Mars exploration approach, NASA will establish a sustainable presence at the Moon and prepare for humanity’s next giant leap, sending astronauts to Mars.

BRIC (Biological Research in Canisters)
NASA’s Space Biology Program selected four space biology investigations that will look at the nutritional value of seeds, DNA repair of fungi, adaptation of yeast, and gene expression of algae to help researchers better understand how biological systems are affected by a deep space environment in preparation for human missions to the Moon, and eventually Mars. The common theme to these investigations is to study DNA damage and protection from radiation, for Moon missions, where radiation exposure will be roughly twice what it is on the International Space Station. 115)
Researchers will use this uncrewed flight test as an opportunity to study effects from the combined environment of space radiation and microgravity. Beyond low-Earth orbit, cosmic radiation is trapped in the Van Allen Belts that are part of Earth’s magnetosphere and can be dangerous to humans and other living organisms, as well as sensitive electronics. The Moon is about 250,000 miles from the Earth, which is about 1,000 times more than the distance from Earth to the International Space Station, and offers a true deep space radiation environment outside the Van Allen Belts.
The experiments will be carried in a container stored in the crew compartment of the Orion capsule for the duration of the mission as it passes through the Van Allen Belts on the way out to the Moon and again on the way back to Earth. All specimens will be returned to the researchers for post-flight analyses after the spacecraft splashes down in the Pacific Ocean.
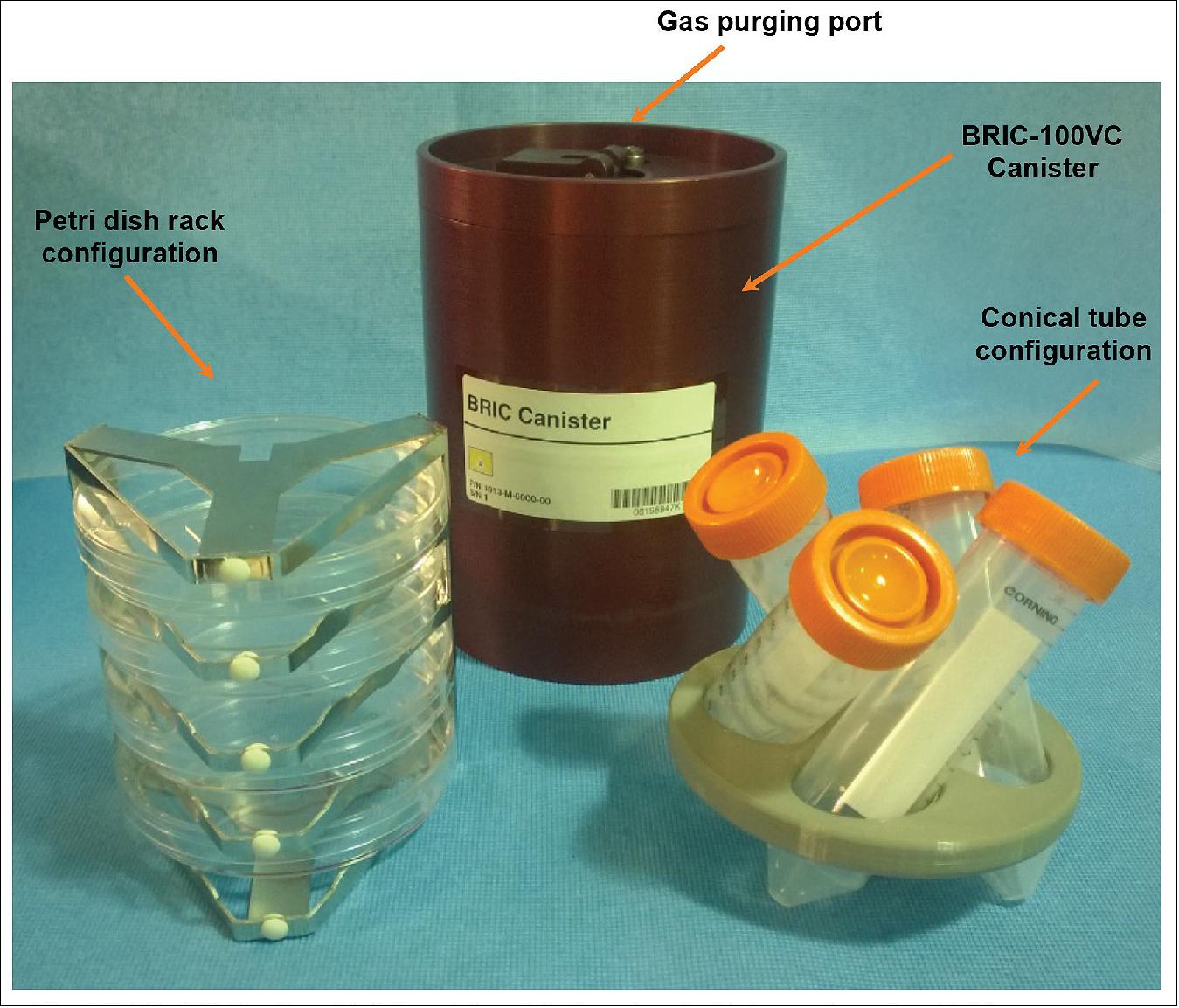
NASA selected investigators from four institutions. When fully implemented, the awards will total ~$1.6 million in fiscal years 2019-2022. The awardees are as follows:
• Federica Brandizzi, Ph.D., Michigan State University: Life beyond Earth: Effect of space flight on seeds with improved nutritional value. This study will characterize how spaceflight effects nutrient stores in plants seeds with the goal of gaining new knowledge that will help increase the nutritional value of plants grown in spaceflight.
• Timothy Hammond, Ph.D., Institute For Medical Research, Inc. Fuel to Mars. This research will include studies with the photosynthetic algae, Chlamydomonas reinhardtii, to identify important genes that contribute to its survival in deep space.
• Zheng Wang, Ph.D., Naval Research Laboratory , Investigating the Roles of Melanin and DNA Repair on Adaptation and Survivability of Fungi in Deep Space. Researchers will be using the fungus Aspergillus nidulans to investigate radioprotective effects of melanin and the DNA damage response."
• Luis Zea, Ph.D., University of Colorado, Boulder: Multi-Generational Genome-Wide Yeast Fitness Profiling Beyond and Below Earth’s van Allen Belts. This investigation will use yeast as a model organism to identify genes that help organisms adapt to the conditions of both deep spaceflight on the Artemis I (former Orion EM-1) mission, and of Low Earth Orbit on the ISS. 116)
NASA awarded these grants under the NASA Research Announcement NNH18ZTT001N-EM1 “Appendix A: Orion Exploration Mission-1 Research Pathfinder for Beyond Low Earth Orbit Space Biology Investigations” which is part of the Research Opportunities in Space Biology (ROSBio) Omnibus. The Space Biology Program is managed by the Space Life and Physical Sciences Research and Applications Division in NASA's Human Exploration and Operations Mission Directorate at the agency's headquarters in Washington, D.C.
Payload Accommodations
Secondary payloads on EM-1 will be launched in the OSA (Orion Stage Adapter). Payload dispensers will be mounted on specially designed brackets, each attached to the interior wall of the OSA as shown in Figure 89. For the EM-1 mission, a total of fourteen brackets will be installed, allowing for thirteen payload locations. The final location will be used for mounting an avionics unit, which will include a battery and sequencer for executing the mission deployment sequence. 117)
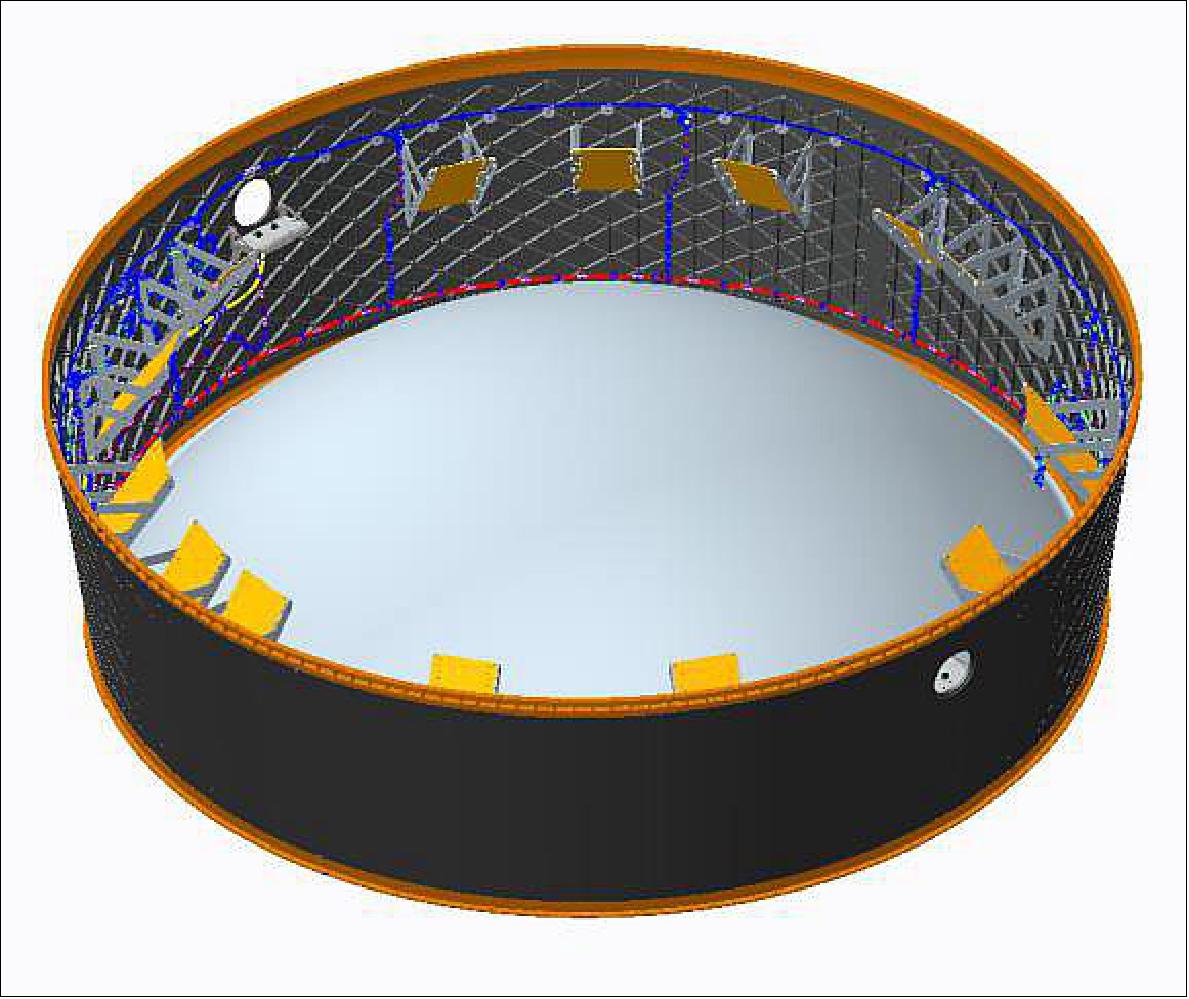
Each bracket is designed to hold the volume equivalent of 6U and 12U dispensers. The current design baseline for the EM-1mission is for payloads to be compatible with 6U class dispensers. Payloads in 6U class will be limited to 14 kg maximum mass. Detailed physical accommodations are documented in Table 3 and Figure 90.
The avionics unit will interface with each deployer through cables mounted in the OSA. Payloads will remain powered off until the sequencer transmits the deployment signal to each dispenser, and the payload is released. Payloads will exit the dispenser at an approximate rate of 1.2 m/s, with deployments separated by a minimum of 5 seconds. No other payload services are currently planned for EM-1.
Deployer | A | B | C |
6U configuration | 239.4 mm | 366 mm | 116 mm |
12 U configuration | 239.4 mm | 366 mm | 229 mm |
GSDO (Ground Systems Development and Operations) : The GSDO program at the KSC (Kennedy Space Center) will perform SLS ground processing. Payloads will be fully integrated into their dispenser at the time of delivery to GSDO. Once delivered, integrated payloads will be installed into the OSA, prior to stacking operations with the Orion system. Prior to roll-out to the pad, battery charging for the avionics unit and each payload containing approved batteries will occur at the VAB (Vehicle Assembly Building).
Operations: Secondary payloads on SLS will remain powered off during the ascent phase of the launch vehicle, through separation of the Orion spacecraft. Once separation is confirmed, the ICPS will send a discrete signal to the SPDS avionics to activate. The schedule for deployments will be loaded as a skit prior to vehicle stacking. No real-time commanding or telemetry is available; therefore payloads will be deployed automatically through the pre-determined mission timeline sequence.
Payloads will have opportunity to deploy beginning after the ICPS disposal sequence is complete (approximately T+4 hours) up to 10 days from launch. All deployments will be completed before avionics batteries are expended. Figure 91 provides an overview of the mission profile.
Once deployed, payloads will be required to wait 15 seconds before deploying antennas, solar panels, sails, etc. to ensure adequate clearance from ICPS. Payload communications following deployment will be the responsibility of the payload project, with no resources being provided by SLS.
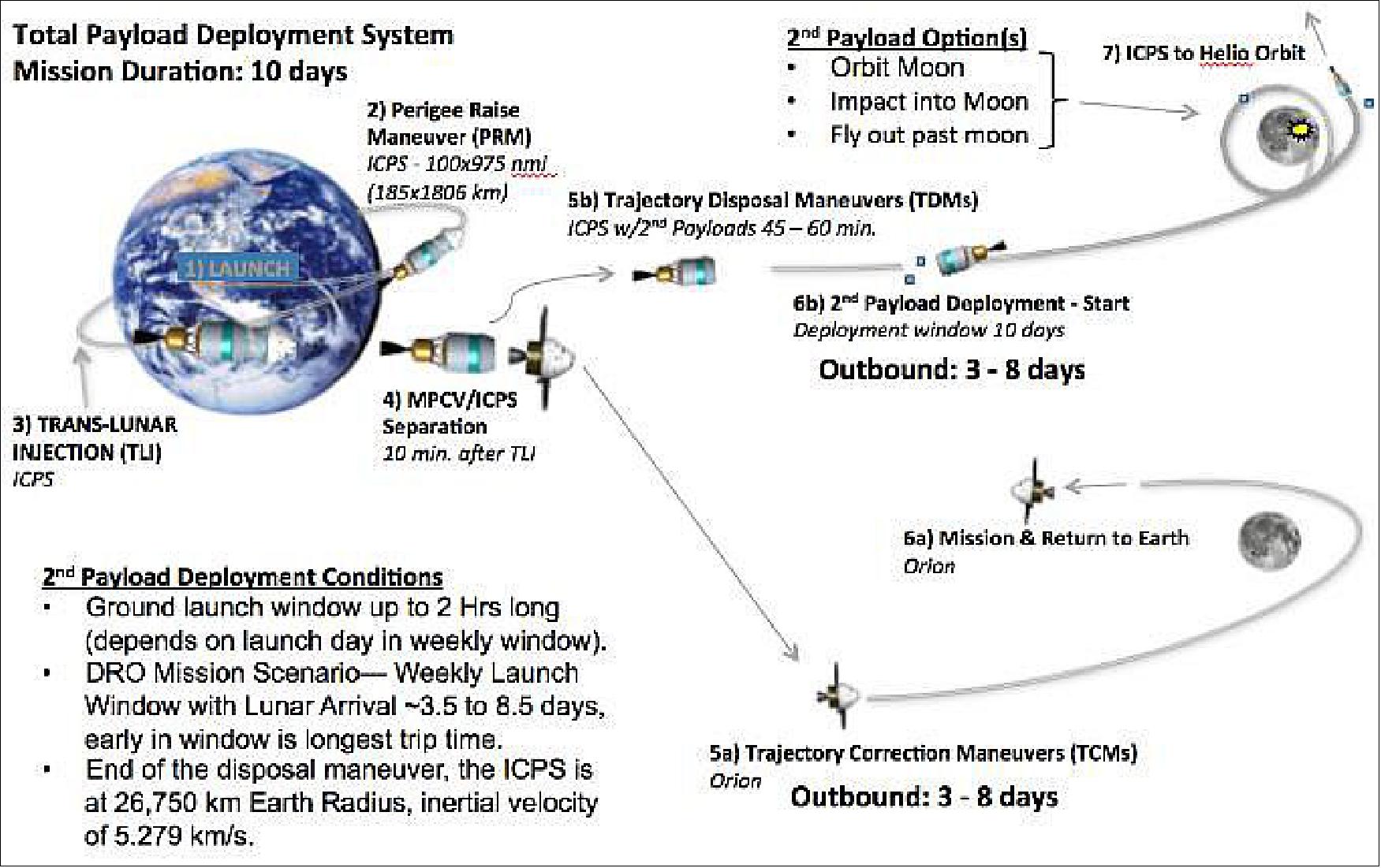
Secondary Payloads
The first flight of NASA’s new rocket, SLS ( Space Launch System), will carry 13 CubeSats/Nanosatellites to test innovative ideas along with an uncrewed Orion spacecraft in 2019. These small satellite secondary payloads will carry science and technology investigations to help pave the way for future human exploration in deep space, including the journey to Mars. SLS’ first flight, referred to as EM-1 (Exploration Mission-1 ), provides the rare opportunity for these small experiments to reach deep space destinations, as most launch opportunities for CubeSats are limited to low-Earth orbit. 118) 119)
The secondary payloads, 13 CubeSats, were selected through a series of announcements of flight opportunities, a NASA challenge and negotiations with NASA’s international partners.
Overview of the 10 selected US secondary missions for the inaugural Orion/EM-1 test flight plus three CubeSats from international partners
NASA selected two payloads through the NextSTEP (Next Space Technologies for Exploration Partnerships) Broad Agency Announcement of May 5, 2015:
• LunIR ⟨originally called Skyfire) - Lockheed Martin Space Systems Company, Denver, Colorado, will develop a 6U CubeSat to perform a lunar flyby of the moon, taking sensor data during the flyby to enhance our knowledge of the lunar surface. LunIR will test a new technology mid-wave infrared camera and micro-cryocooler. LunIR also includes a visible imager.
• Lunar IceCube - Morehead State University, Kentucky, will build a 6U CubeSat to search for water ice and other resources at a low orbit of only 62 miles above the surface of the moon. This CubeSat will orbit the Moon and prospect for water and other volatiles in lunar regolith using BIRCHES (Broadband Infrared Compact High-Resolution Exploration Spectrometer) developed at NASA/GSFC.
Three payloads were selected by NASA’s Human Exploration and Operations Mission Directorate:
• NEA Scout (Near-Earth Asteroid Scout), the 6U CubeSat of NASA/MSFC/JPL will perform reconnaissance of an asteroid, take pictures and observe its position in space
• BioSentinel - a 6U CubeSat of NASA/ARC will use yeast to detect, measure and compare the impact of deep space radiation on living organisms over long durations in deep space.
• Lunar Flashlight - a 6U CubeSat of NASA/JPL/MSFC will look for ice deposits and identify locations where resources may be extracted from the lunar surface
Two payloads were selected by NASA’s Science Mission Directorate:
• CuSP – a 6U CubeSat of the SwRI (Southwest Research Institute) “space weather station” to measure particles and magnetic fields in space, testing the practicality for a network of stations to monitor space weather
• LunaH-Map a 6U CubeSat of Arizona State University will map hydrogen within craters and other permanently shadowed regions throughout the moon’s south pole
Three additional payloads were determined through NASA’s Cube Quest Challenge – sponsored by NASA’s Space Technology Mission Directorate and designed to foster innovations in small spacecraft propulsion and communications techniques. CubeSat builders will vie for a launch opportunity on SLS’ first flight through a competition that has four rounds, referred to as ground tournaments, leading to the selection in 2017 of the payloads to fly on the mission.
• Cisluar Explorers, Cornell University, Ithaca, New York. Cislunar Explorers’ concept consists of a pair of spacecraft on a mission to orbit the moon. These two spacecraft are mated together as a 6U CubeSat. After deployment from the launch vehicle, they will split apart and each give their initial rotation in the process of decoupling.
• CU-E3(CU Earth Escape Explorer), a 6U CubeSat of the University of Colorado in Boulder, CO. The CU-E3 mission will use a lunar gravity assist maneuver to place the CubeSat in a heliocentric orbit that trails the Earth at a distance > 1AU (Astronomical Unit). The distance between the Earth and the spacecraft will gradually increase over time, reaching 27 million km by the end of its one-year mission.
• Team Miles, Team Miles is led by the company Fluid and Reason LLC. Team Miles is a group of citizen scientists and engineers that initially came together through Tampa Hackerspace in Florida – all participants in the community, nonprofit workshop. Team Miles is a 6U CubeSat to demonstrate navigation in deep space using innovative plasma thrusters. Use of a software defined S-band radio to communicate with Earth.
NASA has also reserved three slots for payloads from international partners. These are:
• EQUULEUS (EQUilibriUm Lunar-Earth point 6U Spacecraft) of ISSL (Intelligent Space Systems Laboratory) of the University of Tokyo and JAXA. EQUULEUS will help scientists understand the radiation environment in the region of space around Earth by imaging Earth’s plasmasphere and measuring the distribution of plasma that surrounds the planet. This opportunity may provide important insight for protecting both humans and electronics from radiation damage during long space journeys. It will also demonstrate low-energy trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon region.
• OMOTENASHI (Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor) of JAXA. JAXA will use the OMOTENASHI to demonstrate the technology for low-cost and very small spacecraft to explore the lunar surface. This technology could open up new possibilities for future missions to inexpensively investigate the surface of the moon. The CubeSat will also take measurements of the radiation environment near the moon as well as on the lunar surface.
• ArgoMoon. The Italian company Argotec is building the ArgoMoon CubeSat under the Italian Space Agency (ASI) internal review and approval process. ArgoMoon will demonstrate the ability to perform operations in close proximity of the ICPS ( Interim Cryogenic Propulsion Stage), which will send Orion onto its lunar trajectory. It should also record images of the ICPS for historical documentation and to provide valuable mission data on the deployment of other CubeSats. Additionally, this CubeSat should test optical communication capabilities between the CubeSat and Earth.
All the CubeSats will ride to space inside the OSA (Orion Stage Adapter), which sits between the ICPS (Interim Cryogenic Propulsion Stage) and Orion (Figure 93). The CubeSats will be deployed following Orion separation from the upper stage and once Orion is a safe distance away.
The SPIE ( Spacecraft and Payload Integration and Evolution) office is located at NASA/MSFC (Marshall Space Flight Center) in Huntsville, Alabama, which handles integration of the secondary payloads.
These small satellites are designed to be efficient and versatile—at no heavier than 14 kg, they are each about the size of a boot box, and do not require any extra power from the rocket to function. The science and technology experiments enabled by these small satellites may enhance our understanding of the deep space environment, expand our knowledge of the moon, and demonstrate technology that could open up possibilities for future missions. 122)
A key requirement imposed on the EM-1 secondary payload developers is that the smallsats do not interfere with Orion, SLS or the primary mission objectives. To meet this requirement, payload developers must take part in a series of safety reviews with the SLS Program’s Spacecraft Payload Integration & Evolution (SPIE) organization, which is responsible for the Block 1 upper stage, adapters and payload integration. In addition to working with payload developers to ensure mission safety, the SLS Program also provides a secondary payload deployment system in the OSA (Orion Space Adapter). The deployment window for the CubeSats will be from the time ICPS disposal maneuver is complete (currently estimated to require about four hours post-launch) to up to 10 days after launch. 123)
Deployment windows of secondary payloads: The smallsats manifested on EM-1 will undertake a diverse variety of experiments and technology demonstrations. Seven payloads will be deployed after the ICPS has cleared the first Van Allen Radiation Belt (bus stop 1, Figure 92).
• JAXA, the Japanese Space Agency, will have two smallsats deploy at the first stop: OMOTENASHI will land the smallest lander to date on the lunar surface to demonstrate the feasibility of the hardware for distributed cooperative exploration systems. If this mission is successful, Japan will be the fourth nation to successfully land a mission on the Earth’s moon. The other JAXA payload, EQUULEUS, will fly to a libration orbit around the EML2 (Earth-Moon L2) point and demonstrate trajectory control techniques within the sun-Earth-moon region for the first time by a smallsat.
• Lunar Flashlight is a NASA/JPL ( Jet Propulsion Laboratory) mission that will look for ice deposits and identify locations where resources may be extracted from the lunar surface.
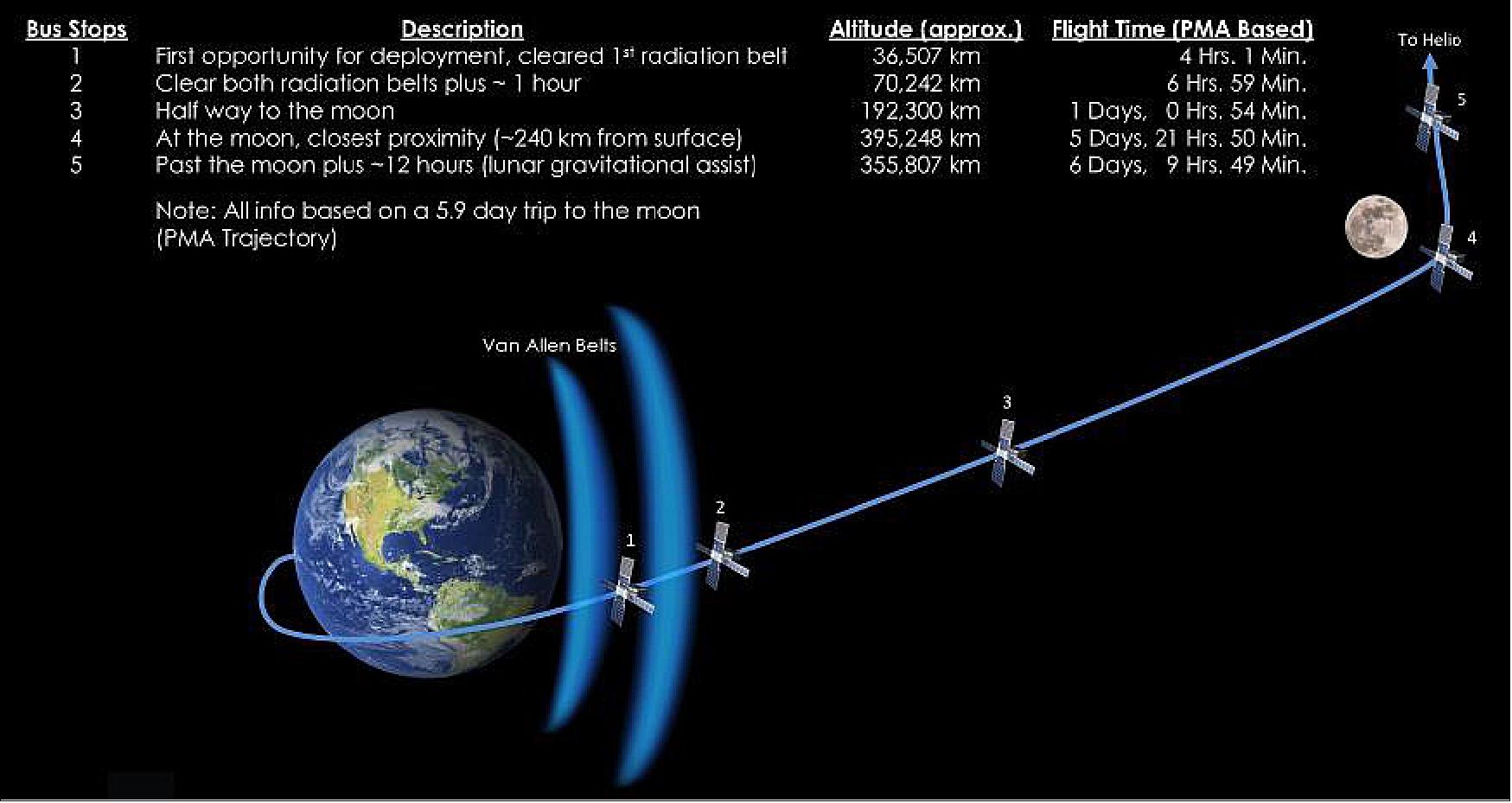
• The NASA/ARC ( Ames Research Center) developed the BioSentinel mission is a yeast radiation biosensor that will measure effects of space radiation on DNA.
• ArgoMoon, sponsored by the Agenzia Spaziale Italiana (ASI), will perform proximity operations with the ICPS post-disposal and record imagery of engineering and historical significance — as well as of the Earth and moon — by testing an advanced software imaging recognition system using high-definition cameras.
• Cislunar Explorers, a team from Cornell University in Ithaca, New York, competing in NASA’s Cube Quest Centennial Challenge competition, has designed a 6U CubeSat that will split into two smaller spacecraft that will orbit the moon using a novel propulsion system of inert water to carry out gravity assists with the moon, and then be captured into lunar orbit.
• Finally, Lunar Icecube, developed by Morehead State University in Kentucky, will search for water in ice, liquid and vapor forms as well as other lunar volatiles from a low-perigee, highly inclined lunar orbit using a compact infrared spectrometer.
• About 90 minutes after the ICPS clears the first Van Allen Belt, the NEA Scout (Near Earth Asteroid) Scout, a NASA/MSFC (Marshall Space Flight Center) mission equipped with a solar sail to rendezvous with an asteroid, will be deployed. NEA Scout will gather detailed imagery and observe the asteroid’s position in space.
• After the ICPS has cleared both radiation belts, the LunaH-Map (Lunar-Polar Hydrogen Mapper) payload from Arizona State University will be released. LunaH-Map will help scientists understand the quantity of hydrogen-bearing materials in cold traps in permanently shaded lunar craters via low-altitude flybys of the moon’s south pole.
• About one hour after clearing the radiation belts (bus stop 2, Figure 92), Lockheed Martin’s LunIR spacecraft, a technology demonstration mission that will perform a lunar flyby, will be deployed. Using a miniature high-temperature MWIR (Mid-Wave Infrared) sensor to collect spectroscopy and thermography data, LunIR will provide data related to surface characterization, remote sensing and site selection for lunar future missions.
About 12 hours after the ICPS passes the moon (bus stop 5, Figure 92) and uses its gravity to enter heliocentric orbit, the final three smallsats will be released.
• The CuSP (CubeSat Mission to Study Solar Particles) mission of SwRI (Southwest Research Institute) in San Antonio, Texas, will study the sources and acceleration mechanisms of solar and interplanetary particles in near-Earth orbit, support space weather research by determining proton radiation levels during ESP (Solar Energetic Particle) events and identifying suprathermal properties that could help predict geomagnetic storms.
• Team Miles, of Miles Space, LLC, of Tampa, Florida, another Cube Quest competitor, has a mission that will fly autonomously using a sophisticated onboard computer system. The spacecraft will be propelled by evolutionary plasma thrusters.
• The final Cube Quest entrant, the University of Colorado CU-E3 (Earth Escape Explorer), is a CubeSat from the University of Colorado in Boulder, Colorado, that will use solar radiation pressure rather than an onboard propulsion system.
Block 1 SmallSat Accommodations
To release the payloads, the SLS Program installed a secondary payload deployment system in the OSA (Orion Space Adapter) that includes mounting brackets for the COTS (Commercial Off-The-Shelf) dispensers, cable harnesses and an avionics unit. Prior to shipping the completed OSA to the EGS (Exploration Ground Systems) Program at Kennedy, engineers at Marshall Space Flight Center tested the avionics unit to ensure possible scripts for controlling bus stop deployments performed as expected based on the flight time to the moon. For EM-1, each payload developer is responsible for the payload, the specified dispenser, vibration isolation system and thermal protection (Ref. 123).
Before the OSA is stacked on the ICPS in Kennedy’s Vehicle Assembly Building, the EGS Program will install the payloads previously integrated in their COTS dispensers onto the brackets. Then the payloads and the deployment avionics unit’s batteries will be charged. EGS technicians will connect the electrical ground support equipment to the secondary payload deployment system via the OSA. The electrical ground support equipment will be removed and no further interaction with the payloads will be performed. On launch day, ICPS contractor ULA (United Launch Alliance) will load the upper stage operational parameters for the flight, including data needed for the secondary payload deployment system avionics unit to perform the correct skit for the mission based on trip time to the moon and when the payloads need to be deployed to complete their missions.
After the TLI (Translunar Injection) burn and separation of Orion from the ICPS/OSA, and conclusion of most of the ICPS disposal maneuvers, the ICPS will power on the secondary payload deployment system. The ICPS will put itself into a 1 rpm roll and be pointed at a 55º beta angle to the sun and proceed with hydrazine depletion as part of stage disposal. Once the propellant is spent, the ICPS will take one more set of readings, downlink those readings and shut down. Soon after, the ICPS/OSA and secondary payload deployment system arrive at the first bus stop where seven payloads will be released into deep space.
Another noteworthy benefit SLS provides to the EM-1 smallsats is the ability to incorporate propulsion systems on the payloads. In most smallsat missions to LEO, CubeSats are restricted from having propulsion systems. Smallsats operating in deep space, on the other hand, require propulsion systems in many mission scenarios. The EM-1 CubeSats employ several types of propulsion systems, including ion, solid, green propellant, solar, pressure, etc., providing mission developers with the rare opportunity to utilize these small propulsion systems in deep space.
A prime example of both extraordinary deep space exploration opportunities and cooperation among numerous organizations, the 13 EM-1 6U-class payloads present the opportunity for science and technology advancement on what is otherwise a demonstration flight, paving the way for additional opportunities for CubeSats on future SLS missions.
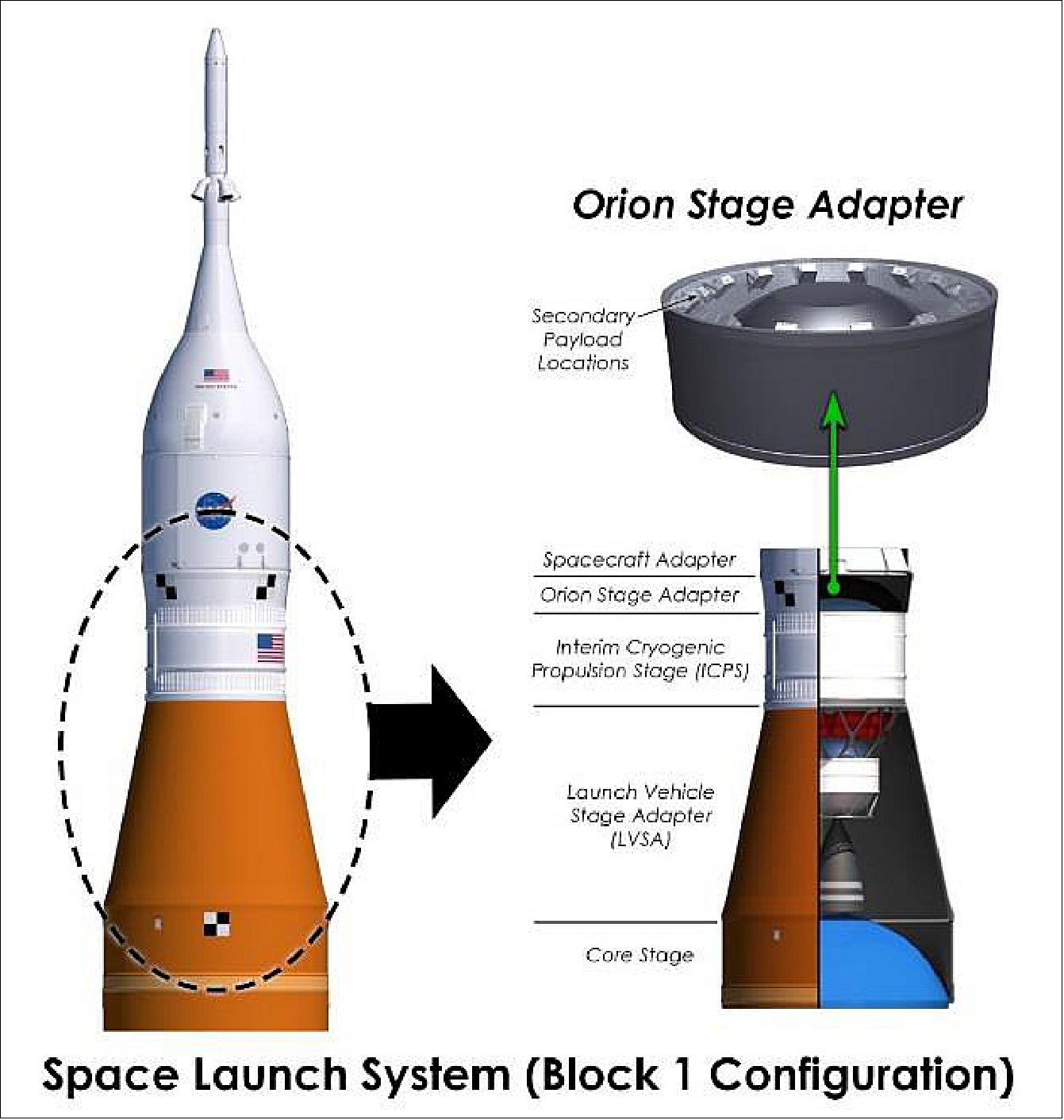
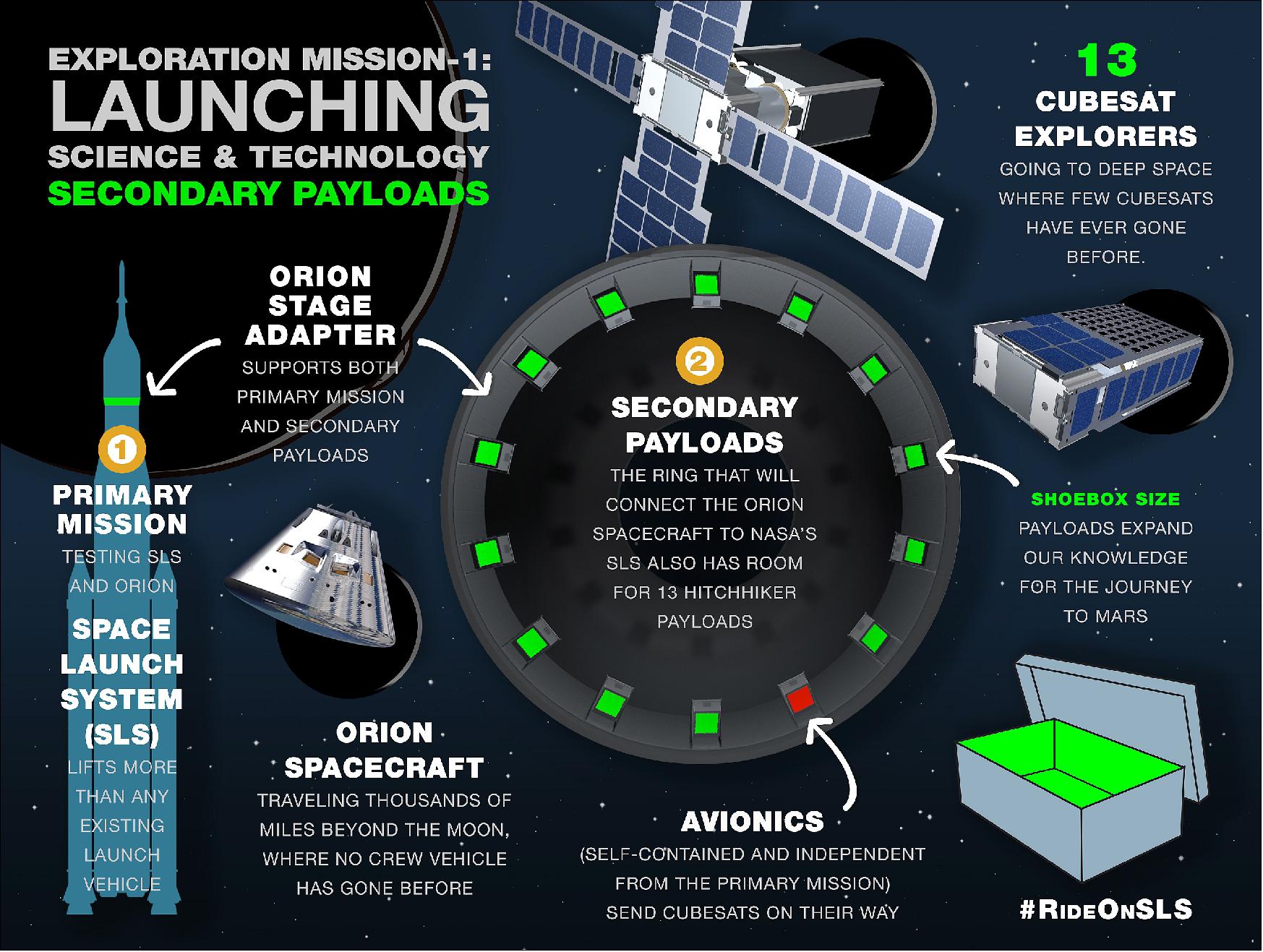
The secondary payloads will be described in separate files on the eoPortal — if sufficient technical information is available of each secondary mission.
Interplanetary CubeSats take advantage of the CubeSat paradigm and of the availability of commercial components developed for LEO (Low Earth Orbit) missions, but they are specifically designed to explore deep space. As a result, interplanetary CubeSats are essentially very different from LEO CubeSats in at least three technological areas: propulsion, radiation tolerance and telecommunication. 125)
In particular, interplanetary CubeSats require changes in almost every subsystem. To start, they generally need a propulsion system. In addition, they often need power systems with lower power modes and higher energy storage capabilities since they have more power requirements than LEO missions, due to the presence of propulsion and due to demanding telecommunication systems. Interplanetary CubeSats also require radiation tolerant components as they are significantly far from the protection of the Earth magnetosphere which is instead granted to the LEO CubeSat missions. For what concerns ADCS (Attitude Determination and Control Subsystem ), interplanetary CubeSats need a combination of traditional control system and propulsion to avoid the issues of wheel`s saturation outside the Earth`s geomagnetic field. In terms of autonomy, interplanetary missions will have less frequent contact with the ground than LEO missions and they will need agile algorithms to facilitate autonomous on board operations.
Finally, one of the most important changes between LEO missions and interplanetary missions is represented by the telecommunication systems. Telecommunication systems for interplanetary CubeSats face harsher environments, longer path distances and have more navigation needs than the LEO CubeSats. For this reason, the design of telecommunication systems for interplanetary missions is extremely challenging and significant development is currently ongoing in the areas of radio design, antenna design and in the design of ground support architectures.
Telecommunication Systems
An effort is underway at JPL to develop a common set of telecommunication hardware systems to fit the envelope of these missions’ goals. As a result, the two missions share the same radio (Iris transponder), the same low noise amplifiers, the same low gain patch antennas, and they are equipped with very similar SSPAs (Solid State Power Amplifiers) that differ only in the power levels that they provide. Additionally, Lunar IceCube and LunaH-Map will share the use of the DSN (Deep Space Network) antennas and of the Morehead State University 21 m station, which is currently being upgraded especially for this purpose.
References
1) ”Around the Moon with NASA’s First Launch of SLS with Orion,” NASA, 8 March 2018, URL: https://www.nasa.gov/feature/around-the-moon-with-nasa-s-first-launch-of-sls-with-orion
2) Massimiliano Bottacini, Julie Grantier, Matthias Gronowski, Bill Johns, ”The European Service Module Contribution to the Orion Program,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-A5.1.3
3) Joshua B. Hopkins, Keith Reiley, Thomas Martin, Don Sauvageau, ”SLS-Orion Missions Leading to Humans on Mars,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-D2.1.3
4) William H. Gerstenmaier, ”Beyond the International Space Station,” Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16-B3,1,1
5) ”NASA's Journey to Mars, Pioneering Next Steps in Space Exploration,” NASA, NP-2015-08-2018-HQ, October 2015, URL: https://www.nasa.gov/sites/default/files/atoms/files/journey-to-mars-next-steps-20151008_508.pdf
6) Kirk A. Shireman, Kathleen C. Laurini, Joel R. Montalbano, ”The International Space Station: The First Step on the Journey to Mars,” Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16.B.3.1.2
7) Jeff Foust, ”NASA sets late August and early September launch dates for Artemis 1,” SpaceNews, 20 July 2022, URL: https://spacenews.com/nasa-sets-late-august-and-early-september-launch-dates-for-artemis-1/
8) ”Artemis: crawling towards launch,” ESA Science & Exploration, 18 March 2022, URL: https://www.esa.int/ESA_Multimedia/Videos/2022/03/Artemis_crawling_towards_launch
9) ”Artemis I – European Service Module perspective,” ESA Science & Exploration, 10 February 2022, URL: https://www.esa.int/ESA_Multimedia/Videos/2022/02/Artemis_I_European_Service_Module_perspective
10) Jeff Foust, ”NASA delays SLS rollout for launch rehearsal,” SpaceNews, 2 February 2022, URL: https://spacenews.com/nasa-delays-sls-rollout-for-launch-rehearsal/
11) ”Orion integration on top of Moon launcher,” ESA, 20October 2021, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_25_-_29_October_2021
12) Jeff Foust, ”NASA sets Artemis 1 launch for no earlier than February,” SpaceNews, 23 October 2021, URL: https://spacenews.com/nasa-sets-artemis-1-launch-for-no-earlier-than-february/
13) Kathryn Hambleton, ”Around the Moon with NASA’s First Launch of SLS with Orion,” NASA 8 March 2018 (updated 27 March 2018), URL: https://www.nasa.gov/feature/around-the-moon-with-nasa-s-first-launch-of-sls-with-orion
14) Kathryn Hambleton, ”Exploration Mission-1 Map,” NASA, 9 Feb. 2018, Last updated: Oct 8, 2021, URL: https://www.nasa.gov/image-feature/exploration-mission-1-map
15) Ken Kremer, ”Orion Gets Beefed Up, Silver-Metallic Thermal Protection Coating for Next Flight on EM-1,” Universe Today, Nov. 30, 2015, URL: http://www.universetoday.com/123114/orion-gets-beefed-up-silver-metallic-thermal-protection-coating-for-next-flight-on-em-1/
16) ”Exploration Mission-1 Crew Module Comes Together,” NASA Orion Monthly Newsletter, Sept. 2015, URL: https://www.nasa.gov/sites/default/files/atoms/files/orion_monthly_newsletter_9-2015.pdf
17) ”Orion Ingenuity Improves Manufacturing While Reducing Mass,” NASA, Nov. 17, 2015, URL: http://www.nasa.gov/feature/orion-ingenuity-improves-manufacturing-while-reducing-mass
18) ”Orion: Lessons Learned from EFT-1 and, EM-1, AA-2, and EM-2 status,” Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16,B3,9-GTS.2.1
19) ”Orion European Service Module,” ESA, Dec. 1, 2015, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/Orion/European_Service_Module
20) Philippe Deloo, Joel Kearns, Oliver Juckenhöfel, Tony Byers, ”Development Status of the “European built” Orion Service Module,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B3.1.6
21) Markus Jäger, Matthias Gronowski, Massimiliano Bottacini, ”Orion European Service Module on the Way to first Flight Model Delivery,” Proceedings of the 67th IAC (International Astronautical Congress), Guadalajara, Mexico, Sept. 26-30, 2016, paper: IAC-16-B3.7.4
22) ”Europe delivers module for first astronaut mission to the Moon,” ESA Science & Exploration, 13 October 2021, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Europe_delivers_module_for_first_astronaut_mission_to_the_Moon
23) ”A European push to the Moon,” ESA Science & Exploration, 6 October 2021, URL: https://www.esa.int/ESA_Multimedia/Videos/2021/10/A_European_push_to_the_Moon
24) ”Getting ready to rocket,” ESA Science & Exploration, 14 May 2021, URL: https://www.esa.int/ESA_Multimedia/Images/2021/05/Getting_ready_to_rocket
25) Clarissa R. Cottrill, ”One Giant Leap: NASA IV&V’s work on Artemis to impact future space exploration,” NASA Feature, 20 April 2021, URL: https://www.nasa.gov/feature/one-giant-leap-nasa-ivv-s-work-on-artemis-to-impact-future-space-exploration
26) Anna Heiney, ”NASA Certifies New Launch Control System for Artemis I,” NASA Feature, 8 April 2021, URL: https://www.nasa.gov/feature/nasa-certifies-new-launch-control-system-for-artemis-i
27) Madison Tuttle, ”Artemis I Launch Preparations Are Stacking Up,” NASA Feature, 24 November 2020, URL: https://www.nasa.gov/feature/artemis-i-launch-preparations-are-stacking-up
28) ”Bye bye, European Service Module, see you in space,” ESA Science & Exploration, 6 November 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/11/Bye_bye_European_Service_Module_see_you_in_space
29) Danny Baird, ”Artemis I: Demonstrating the Capabilities of NASA’s United Networks,” NASA, 8 October 2020, URL: https://www.nasa.gov/feature/goddard/2020/artemis-i-demonstrating-the-capabilities-of-nasa-s-united-networks
30) ”ESA and NASA logos on Artemis I rocket and Orion,” ESA Science & Exploration, 01 October 2020, URL: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Orion/ESA_and_NASA_logos_on_Artemis_I_rocket_and_Orion
31) ”Over the Moon,” ESA Science & Exploration, 22 September 2020, URL: https://www.esa.int/ESA_Multimedia/Images/2020/09/Over_the_Moon
32) Rachel Kraft, ”Orion Program Completes Key Review for Artemis I,” NASA Artemis, 1 September 2020, URL: https://blogs.nasa.gov/artemis/2020/09/01/orion-program-completes-key-review-for-artemis-i/
33) ”Installation of Orion adapter for first Artemis lunar flight,” ESA Science & Exploration, 14 August 2020, URL: https://www.esa.int/About_Us/Week_in_images/Week_in_images_10-14_August_2020
34) Brian Dunbar, ”NASA Begins Installing Orion Adapter for First Artemis Moon Flight,” NASA Feature, 13 August 2020, URL: https://www.nasa.gov/image-feature/nasa-begins-installing-orion-adapter-for-first-artemis-moon-flight
35) Danielle Sempsrott, ”Key Connection for Artemis I Arrives at Kennedy,” NASA Feature, 30 July 2020, URL: https://www.nasa.gov/feature/key-connection-for-artemis-i-arrives-at-kennedy
36) ”Rocket Motors for First NASA Artemis Moon Mission Arrive at Spaceport,” NASA Press Release 20-064, 16 June 2020, URL: https://www.nasa.gov/press-release/rocket-motors-for-first-nasa-artemis-moon-mission-arrive-at-spaceport
37) ”Last stop before launch: Orion passes tests and returns to Kennedy Space Center,” ESA / Science & Exploration / Human and Robotic Exploration / Orion, 27 March 2020, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Orion/Last_stop_before_launch_Orion_passes_tests_and_returns_to_Kennedy_Space_Center
38) Danielle Sempsrott, ”Welcome Home, Orion: spacecraft ready for final Artemis I launch preparations,” NASA/KSC, 26 March 2020, URL: https://blogs.nasa.gov/kennedy/2020/03/26/welcome-home-orion-spacecraft-ready-for-final-artemis-i-launch-preparations/
39) Bettina Inclán / Matthew Rydin, Karen Northon,”March 19 Administrator Statement on Agency Response to Coronavirus,” NASA Release 20-030, 20 March 2020, URL: https://www.nasa.gov/press-release/march-19-administrator-statement-on-agency-response-to-coronavirus
40) ”Tests complete for Orion,” ESA Science & Exploration, 16 March 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/03/Tests_complete_for_Orion
41) ”Interference testing,” ESA Science & Exploration, 3 March 2020, URL: http://www.esa.int/ESA_Multimedia/Images/2020/03/Interference_testing
42) ”Back to the Moon with ESA,” ESA Science & Exploration, 14 January 2020, URL: http://www.esa.int/ESA_Multimedia/Videos/2020/01/Back_to_the_Moon_with_ESA
43) Linda Herridge, ”NASA Rings in Busy New Year in Florida to Prepare for Artemis Missions,” NASA Feature, 13 January 2020, URL: https://www.nasa.gov/feature/nasa-rings-in-busy-new-year-in-florida-to-prepare-for-artemis-missions
44) ”Europe powers up for third and fourth Orion spacecraft,” ESA / Science & Exploration / Human and Robotic Exploration / Orion, 17 December 2019, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Orion/Europe_powers_up_for_third_and_fourth_Orion_spacecraft
45) ”Thermal enclosure for Orion,” ESA Science & Exploration, 4 December 2019, URL: http://www.esa.int/ESA_Multimedia/Images/2019/12/Thermal_enclosure_for_Orion
46) ”NASA's Plum Brook Station,” ESA, 27 November 2019, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Orion/Orion_spacecraft_arrives_at_Plum_Brook
47) Jimi Russell, ”Orion Spacecraft for Artemis I Mission Arrives at NASA’s Plum Brook Station for Testing,” NASA Press Release 19-017, 26 November 2019, URL: https://www.nasa.gov/press-release/Glenn/2019/orion-spacecraft-for-artemis-i-mission-arrives-at-nasa-s-plum-brook-station-for
48) ”On a Super Guppy ... Orion Heads to Plum Brook Station,” Satnews Daily, 27 November 2019, URL: http://www.satnews.com/story.php?number=445665361
49) ”Orion on the move,” ESA Science & Exploration, 22 November 2019, URL: http://www.esa.int/About_Us/Corporate_news/Week_in_images_br_18-22_November_2019
50) ”A pathway for communicating at the Moon,” ESA / Science & Exploration / Human and Robotic Exploration, 23 October 2019, URL: http://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/A_pathway_for_communicating_at_the_Moon
51) ”Lockheed Martin Completes NASA's Orion Spacecraft Capsule for Artemis 1 Mission to the Moon,” Prnewswire, 20 July 2019, URL: https://www.prnewswire.com/news-releases/lockheed-martin-completes-nasas-orion-spacecraft-capsule-for-artemis-1-mission-to-the-moon-300888329.html
52) Kathryn Hambleton, Laura Rochon, Brittney Thorpe, ”Successful Orion Test Brings NASA Closer to Moon, Mars Missions,” NASA Press Release 19-054, 02 July 2019, URL: https://www.nasa.gov/press-release/successful-orion-test-brings-nasa-closer-to-moon-mars-missions
53) ”ESA and NASA to team up on lunar science,” ESA, 28 March 2019, URL: https://www.esa.int/Our_Activities/Human_and_Robotic_Exploration/Exploration/ESA_and_NASA_to_team_up_on_lunar_science
54) ”Touch down: European module arrives at Kennedy Space Center,” ESA, 7 November 2018, URL: http://m.esa.int/Our_Activities/Human_Spaceflight/Orion/Touch_down_European_module_arrives_at_Kennedy_Space_Center
55) Kathryn Hambleton, Laura Rochon, Brittney Thorpe, ”European-Built Service Module Arrives in U.S. for First Orion Moon Mission,” NASA, Release 18-095, 6 November 2018, URL: https://www.nasa.gov/press-release/european-built-service-module-arrives-in-us-for-first-orion-moon-mission
56) ”Goodbye Europe, hello Moon: European Module ships soon,” ESA, 30 October 2018, URL: http://m.esa.int/Our_Activities/Human_Spaceflight/Orion/Goodbye_Europe_hello_Moon_European_Module_ships_soon
57) ”Thrusters with Additively Manufactured Components Qualified to Fly Humans on NASA’s Orion Spacecraft,” Aerojet Rocketdyne, 29 October 2018, URL: https://ir.aerojetrocketdyne.com/node/23716/pdf
58) ”European Service Module ready for shipment to the US,” ESA, 23 October 2018, URL: http://m.esa.int/spaceinimages/Images/2018/10/European_Service_Module_ready_for_shipment_to_the_US
59) Mark Kirasich, Nico Dettmann, Annette Hasbrook, Charles Lundquist, Susan Motil, ”Orion Development Status and Role in the Lunar Orbital Platform,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B3.1.1, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/B3/1/manuscripts/IAC-18,B3,1,1,x47493.pdf
60) ”Orion’s first Service Module integration complete,” ESA, 18 September 2018, URL: http://m.esa.int/Our_Activities/Human_Spaceflight/Orion/Orion_s_first_Service_Module_integration_complete
61) ”Heat Shield Install Brings Orion Spacecraft Closer to Space,” NASA, 16 August 2018, URL: https://www.nasa.gov/feature/heat-shield-install-brings-orion-spacecraft-closer-to-space
62) ”EM-1 and EM-2 Make Progress Across NASA and the Nation,” NASA, APPEL, 6 June 2018, URL: https://appel.nasa.gov/2018/06/06/em-1-and-em-2-make-progress-across-nasa-and-the-nation/
63) ”Fuel tanks and wings for Orion module,” ESA, 23 April 2018, URL: http://m.esa.int/Our_Activities/Human_Spaceflight/Orion/Fuel_tanks_and_wings_for_Orion_module
64) Leejay Lockhart and Amanda Griffin, ”A Window to Space,” NASA, 20 April 2018, URL: https://www.nasa.gov/feature/a-window-to-space
65) ”NASA Deep Space Exploration Systems Look Ahead to Action-Packed 2018,” 5 Jan. 2018, URL: https://www.nasa.gov/feature/nasa-deep-space-exploration-systems-look-ahead-to-action-packed-2018
66) ”NASA Team Outfits Orion for Abort Test with Lean Approach,” NASA, 5 March 2018, URL: https://www.nasa.gov/feature/nasa-team-outfits-orion-for-abort-test-with-lean-approach
67) ”Thermal Cycle Test Confirms Orion and its Systems,” NASA, 16 Feb. 2018, URL: https://www.nasa.gov/feature/thermal-cycle-test-confirms-orion-and-its-systems
68) Philip Sloss,”Constructing the crewed Orion – EM-2 spacecraft deep into welding operations,” NASA Spaceflight.com, 14 Feb. 2018, URL: https://www.nasaspaceflight.com/2018/02/constructing-the-crewed-orion-em-2-welds/
69) ”Work Progresses on Orion Powerhouse for Crewed Mission,” NASA, Oct. 12, 2017, URL: https://www.nasa.gov/image-feature/work-progresses-on-orion-powerhouse-for-crewed-mission
70) Nico Dettmann, Philippe Berthe, ”Orion European Service Module Development Status and NASA/ESA Cooperation,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17, B3,1,8
71) Markus Jäger, Matthias Gronowski, ”Orion European Service Module Ready for Delivery,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17, B3,7,1
72) ”Lockheed Martin Powers-up Next Orion Spacecraft for First Time,” Space Daily, August 24, 2017, URL: http://www.spacedaily.com/reports/Lockheed_Martin_Powers_up_Next_Orion_Spacecraft_for_First_Time_999.html
73) ”Lockheed Martin Powers-up Next Orion Spacecraft for First Time,” PR Newswire, Aug. 22, 2017, URL: http://www.prnewswire.com/news-releases/lockheed-martin-powers-up-next-orion-spacecraft-for-first-time-300507210.html
74) William Harwood, ”NASA rules out crew on first SLS flight,” Spaceflight Now, May 12, 2017, URL: https://spaceflightnow.com/2017/05/12/nasa-rules-out-crew-on-first-sls-flight/
75) ”NASA Affirms Plan for First Mission of SLS, Orion,” NASA, May 12, 2017, URL: https://www.nasa.gov/feature/nasa-affirms-plan-for-first-mission-of-sls-orion
76) Brian Dunbar, ”NASA to Study Adding Crew to First Flight of SLS and Orion,” NASA, Feb. 15, 2017, URL: https://www.nasa.gov/feature/nasa-to-study-adding-crew-to-first-flight-of-sls-and-orion
77) ”Curtiss-Wright ships miniature network data system for Orion,” Space Daily, April 6, 2017, URL: http://www.spacedaily.com/reports/Curtiss_Wright_Ships_Miniature_Network_Space_Data_Acquisition_System_for_NASAs_Orion_Spacecraft_Program_999.html
78) ”Waiting for the burn,” ESA, Feb. 27, 2017, URL: http://m.esa.int/spaceinimages/Images/2017/02/Waiting_for_the_burn
79) ”Europe will provide propulsion, life support to astronauts on missions beyond the Moon First crewed mission planned for 2021, beginning a new era of human deep space exploration,” Airbus DS, Feb. 16, 2017, URL: https://orionesm.airbusdefenceandspace.com/blog/airbus-defence-and-space-wins-200-million-euros-esa-contract-for-second-service-module-for-nasas-orion-crewed-space-capsule/
80) ”Airbus Defence and Space delivers propulsion test module for the Orion program to NASA,” Airbus DS, Jan. 24, 2017, URL: https://airbusdefenceandspace.com/newsroom/news-and-features/airbus-defence-and-space-delivers-propulsion-test-module-for-the-orion-programme-to-nasa/
81) ”Testing completed on Orion Service Module,” ESA, Dec. 14, 2016, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/Orion/Testing_completed_on_Orion_service_module
82) Stephen Clark, ”Shuttle engine delivered to Orion service module assembly site,” Spaceflight Now, January 2, 2017, URL: https://spaceflightnow.com/2017/01/02/shuttle-engine-delivered-to-orion-service-module-assembly-site/
83) ”Gearing up for Orion propulsion subsystem tests,” ESA, Sept. 21, 2016, URL: http://blogs.esa.int/orion/2016/09/21/gearing-up-for-orion-propulsion-subsystem-tests/
84) ”ESA to supply Service Module for the first crewed Orion mission,” ESA, Dec. 7, 2016, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/Orion/ESA_to_supply_Service_Module_for_first_crewed_Orion_mission
85) Linda Herridge, ”Orion Crew Module Adapter Lifted in Processing Facility at NASA’s Kennedy Space Center,” NASA, Nov. 21, 2016, URL: https://blogs.nasa.gov/kennedy/2016/11/21/orion-crew-module-adapter-lifted-in-processing-facility-at-nasas-kennedy-space-center/
86) Linda Herridge, ”Orion Heat Shield for Next Space Flight arrives at NASA's Kennedy Space Cente,” NASA, Sept. 19, 2016: URL: https://www.nasa.gov/image-feature/orion-heat-shield-for-exploration-mission-1-arrives-at-nasas-kennedy-space-center-in
87) ”Orion’s Service Module Completes Critical Design Review,” NASA, June 27, 2016, URL: https://www.nasa.gov/feature/orion-s-service-module-completes-critical-design-review
88) Mark Garcia, ”Orion Service Module Testing Sounds Off,” NASA, May 25, 2016: URL: http://www.nasa.gov/exploration/systems/sls/international-partners-provide-cubesats-for-sls-maiden-flight
89) ”Airbus Defence and Space starts Orion service module assembly,”Airbus DS Press Release, May 19, 2016, URL: https://airbusdefenceandspace.com/newsroom/news-and-features/airbus-defence-and-space-starts-orion-service-module-assembly/
90) Linda Herridge, ”Orion Passes the Pressure Test,” NASA, May 11, 2016, URL: http://www.nasa.gov/feature/orion-passes-the-pressure-test
91) ”Testing Orion's European Structural Test Article,” ESA, April 29, 2016, URL: http://www.esa.int/spaceinimages/Images/2016/04/Testing_Orion_s_European_Structural_Test_Article
92) ”Orion's wings,” ESA, March 1, 2016, URL: http://www.esa.int/spaceinimages/Images/2016/03/Orion_s_wings
93) Ken Kremer, ”NASA’s Orion Crew Module Backbone Arrives at KSC Aboard Super Guppy for Exploration Mission-1,” Universe Today, Feb. 2, 2016, URL: http://www.universetoday.com/127128/nasas-orion-crew-module-backbone-arrives-ksc-aboard-super-guppy-exploration-mission-1/
94) ”Mated,” ESA, Jan. 22, 2016, URL: http://www.esa.int/spaceinimages/Images/2016/01/Mated
95) Ken Kremer, ”NASA Completes Welding on Lunar Orion EM-1 Pressure Vessel Launching in 2018,” Universe Today, Jan. 22, 2016, URL: http://www.universetoday.com/126581/nasa-completes-welding-on-lunar-orion/
96) ”Orion’s Critical Design Review an important milestone toward Exploration Mission-1,” Spaceflight Insider, Nov. 16, 2015, URL: http://www.spaceflightinsider.com/organizations/lockheed-martin-organizations/orions-critical-design-review-important-milestone-toward-exploration-mission-1/
97) ”Test model arrives,” ESA, Nov. 10, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/11/Test_model_arrives
98) ”Orion's European module ready for testing,” ESA, Nov. 10, 2015, URL: http://www.esa.int/Our_Activities/Human_Spaceflight/Orion_s_European_module_ready_for_testing
99) ”Test Version of European Powerhouse for Orion Arrives Stateside,” NASA Monthly Newsletter, Nov. 2015, URL: https://www.nasa.gov/sites/default/files/atoms/files/orion_monthly_newsletter_11-2015.pdf
100) ”Orion ESM structural test model,” ESA, Nov. 6, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/11/Orion_ESM_structural_test_model
101) ”Lockheed Martin Moves into Full-Scale Assembly and Test of NASA’s Orion Spacecraft,” Lockheed Martin, Oct. 26, 2015, URL: http://www.lockheedmartin.com/us/news/press-releases/2015/october/space-orion-assembly.html
102) ”Orion Program makes progress with Critical Design Review,” NASA Orion Monthly Newsletter, Oct. 2015, URL: https://www.nasa.gov/sites/default/files/atoms/files/orion_monthly_newsletter_10-2015_web.pdf
103) Kathryn Hambleton, Shannon Ridinger, ”NASA Completes Critical Design Review for Space Launch System,” NASA, Release 15-210, Oct. 22, 2015, URL: https://www.nasa.gov/press-release/nasa-completes-critical-design-review-for-space-launch-system
104) ”Aerojet Rocketdyne Subsystems Critical Design Review Passes Muster = Depends On Safety Of Astronauts In Deep Space,” Satnews Daily, Oct. 12, 2015, URL: http://www.satnews.com/story.php?number=469038823
105) Kathryn Hambleton, Rachel Kraft, “First Pieces of NASA’s Orion for Next Mission Come Together at Michoud,” NASA Release 15-182, Sept. 8, 2015, URL: http://www.nasa.gov/press-release/first-pieces-of-nasa-s-orion-for-next-mission-come-together-at-michoud
106) “Seven Pieces Rather Than 18 Make For A Far Less Weighty Orion Spacecraft,” Satnews Daily, Sept. 9, 2015, URL: http://www.satnews.com/story.php?number=403645842
107) Jeff Foust, ”Amazon’s Alexa to be tested on Artemis 1,” SpaceNews, 5 January 2022, URL: https://spacenews.com/amazons-alexa-to-be-tested-on-artemis-1/
108) Razvan Gaza, Hesham Hussein, Tad Shelfer, David Murrow, Chirag Patel, Gideon Waterman, Oren Milstein, Thomas Berger, Joachim Ackerlein, Karel Marsalek, Daniel Matthiä, Bartos Przybyla, Aleksandra Rutczynska, Ulrich Straube, Ramona Gaza, Martin Leitgab, Kerry Lee, Edward J. Semones, Kathleen Coderre,”MARE: International Science aboard Orion EM-1 (Matroshka AstroRad Radiation Experiment),” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18,A1,5,10, URL: http://www.wrmiss.org/workshops/twentysecond/Gaza.pdf
109) Thomas Berger, ”Exploration missions and radiation,” ISPCS (International Symposium for Personal and Commercial Spaceflight) 11-12 October 2017, Las Cruces, New Mexico, USA, URL: https://web.archive.org/web/20201014083725/https://ispcs.com/wp-content/uploads/Thomas-Berger-ISPCS-2017-FINAL-1.compressed.pdf
110) ”A Radiation Protection vest provided by the Israel Space Agency will be tested by NASA on its Orion EM-1 Mission around the Moon,” Israel Ministry of Science and Technology, 17 April 2018, URL: https://www.gov.il/en/Departments/news/most_news20180417
111) ”Tracking cosmic radiation – To the Moon and back with ISA and NASA,” DLR, 3 October 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-30072/year-all/#/gallery/32133
112) http://www.cirsinc.com/products/modality/33/atom-dosimetry-verification-phantoms
113) ”Public Names ‘Moonikin’ Flying Around Moon on NASA’s Artemis I Mission,” NASA Press Release 21-087, 29 June 2021, URL: https://www.nasa.gov/press-release/public-names-moonikin-flying-around-moon-on-nasa-s-artemis-i-mission
114) Aimee Crane, ”Orion “Passengers” on Artemis I to Test Radiation Vest for Deep Space Missions,” NASA, 13 February 2020, URL: https://www.nasa.gov/feature/orion-passengers-on-artemis-i-to-test-radiation-vest-for-deep-space-missions
115) ”Small Samples with Big Mission on First Orion Flight Around the Moon,” NASA, 15 February 2019, URL: https://www.nasa.gov/feature/small-samples-with-big-mission-on-first-orion-flight-around-the-moon
116) Luis Zea, Tobias Niederwieser, Louis Stodieck, Christopher E. Carr, Ralf Moeller, Corey Nislow, ”Experiment Design for a Genome-Wide Yeast Fitness Profiling Experiment On Board Orion’s Artemis 1 Mission,” Proceedings of the 70th IAC (International Astronautical Congress), Washington DC, USA, 21-25 October 2019, paper: IAC-19-A2.7.9, URL: https://iafastro.directory/iac/proceedings/IAC-19/IAC-19/A2/7/manuscripts/IAC-19,A2,7,9,x51501.pdf
117) Jody Singer, Joseph Pelfrey, George Norris, ”Enabling Science and Deep Space Exploration through Space Launch System (SLS) Secondary Payload Opportunities,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, paper: AIAA 2016 2585, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2585
118) Kathryn Hambleton, Kim Newton, / Shannon Ridinger, ”NASA Space Launch System’s First Flight to Send Small Sci-Tech Satellites Into Space,” NASA Press Release 16-011, Feb. 2, 2016, URL: http://www.nasa.gov/press-release/nasa-space-launch-system-s-first-flight-to-send-small-sci-tech-satellites-into-space
119) Christopher Moore, Jitendra Joshi, Nicole Herrmann, ”Deep-Space CubeSats on Exploration Mission-1,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper:IAC-17-B4.8
120) ”Three DIY CubeSats Score Rides on NASA’s First Flight of Orion, Space Launch System,” NASA Release 17-055, 8 June 2017, URL: https://www.nasa.gov/press-release/three-diy-cubesats-score-rides-on-nasa-s-first-flight-of-orion-space-launch-system
121) Kathryn Hambleton, Kim Henry, Tracy McMahan, ”International Partners Provide Science Satellites for America’s Space Launch System Maiden Flight,” NASA, 26 May 2016 and update of 07 February 2018, URL: https://www.nasa.gov/exploration/systems/sls/international-partners-provide-cubesats-for-sls-maiden-flight
122) ”Smallsats Of Scientific Persuasions To Be Supplied By International Partners To NASA For The Maiden Flight Of SLS,” Satnews Daily, May 31, 2016, URL: http://www.satnews.com/story.php?number=1735749470
123) Kimberly F. Robinson, Scott F. Spearing, David Hitt, ”NASA’s Space Launch System: Opportunities for Small Satellites to Deep Space Destinations,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-IX-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4119&context=smallsat
124) NASA, Feb. 1, 2016, URL: https://www.nasa.gov/launching-science-and-technology/multimedia/secondarypayloadinfographic.html
125) Alessandra Babuscia, Krisjani Angkasa, Benjamin Malphrus, Craig Hardgrove, ”Development of telecommunication systems and ground support for EM-1 interplanetary CubeSats missions: Lunar IceCube and LunaH-Map,” Proceedings of the 68th IAC (International Astronautical Congress), Adelaide, Australia, 25-29 Sept. 2017, paper: IAC-17-B4,8,4
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Orion Vehicle ESM Development Status Payloads References Back to Top