Tatiana-2 (Universitetsky-Tatyana-2)
EO
Atmosphere
Mission complete
SINP MSU
Quick facts
Overview
| Mission type | EO |
| Agency | SINP MSU |
| Mission status | Mission complete |
| Launch date | 17 Sep 2009 |
| End of life date | 16 Jan 2010 |
| Measurement domain | Atmosphere |
| CEOS EO Handbook | See Tatiana-2 (Universitetsky-Tatyana-2) summary |
Tatiana-2 / Universitetsky-2
Overview
Tatiana-2 (also spelling of Tatyana-2; Tatiana-2 is also known as Universitetsky-2) is a cooperative international microsatellite science mission of the D. V. Skobeltsyn Institute of Nuclear Physics (SINP) at the Lomonosov Moscow State University (MSU), Moscow, Russia. The overall objective is the measurement of TLEs (Transient Luminous Events) in Earth's atmosphere. The goal is to observe simultaneously TLE and NUV (Near-Ultraviolet) emission profiles in high temporal resolution (ms) in a wide spectrum of 8 bands. The SINP-MSU partners in the project are from Korea and Mexico :
• Research Center of MEMS Space Telescope (RCMST), Ewha Womans University (EWU), Seoul, Korea
• Department of Electrical Engineering and the Department of Astronomy of the Seoul National University, Seoul, Korea
• Department of Physics, Pusan National University, Pusan, Korea
• University of Puebla (BUAP), Puebla, Mexico.
The Tatiana-2 project is funded by several sources from Russia, Korea, Mexico, and the ESEMS (Experimental Scientific Education Micro Satellite) project of Taiwan. The ESEMS partners are:
• NCU (National Central University), Jongli, Taiwan
• NCKU (National Cheng-Kung University), Tainan, Taiwan.
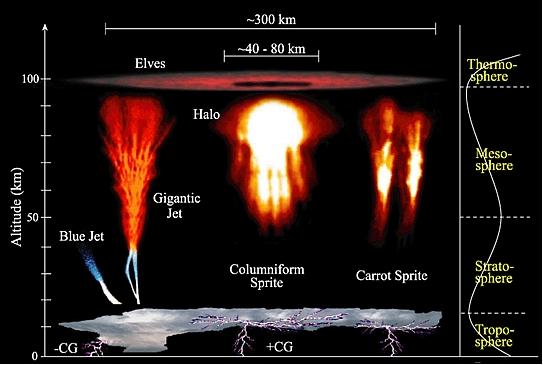
The catalytic reactions of TLEs may have an impact on the global atmospheric ozone chemistry. In the early 21st century, the science community is just beginning to understand the phenomena of upper atmospheric (faint and brilliant) discharges. More experimental data (very high-speed imagery of sensitive detectors) is needed to analyze and interpret these transient events.
Background
The Tatiana-1 educational microsatellite (30 kg), also known as Universitetskiy-Tatiana (RS-23), was launched on January 20, 2005 into a polar orbit at a near-circular altitude of 950 km, an inclination of 83º, and a period of 103.8 min (Tatiana-1 was a secondary payload to the military Parus navigation satellite). Tatiana-1 was a scientific satellite, developed by scientists and students of the Moscow State University (SINP-MSU) and the Russian Military Space Academy.
Tatiana's science payload measured the atmosphere glow and the transient events in the near UV range (spectral range of 300 - 400 nm). The UV detector was of the type PMT (Photomultiplier Tube), observing the atmosphere in the nadir direction with a FOV (Field of View) of 14º ( equivalent to a diameter of the observed area in the atmosphere of ~ 250 km) and providing imagery of the UV flux intensity. Temporal profiles of the selected UV flashes were measured in 2 time ranges as digital traces of 4 and 64 ms duration. 1)
The data of the Tatiana-1 UV detector indicate two regions of the UV intensity in Earth's atmosphere which differ by an order of magnitude:
• Polar aurora zones: IUV ~ 109 ph/cm2/s/sr (photons of UV flux intensity)
• Equatorial and middle latitude zones: Iuv ~108 ph/cm2/s/sr.
One of the main goals of the Tatiana-1 mission was the observation of UV flashes. Two oscilloscopes were used for the measurment of temporal flash profiles:
1) Oscilloscope-1: trace duration of 4 ms and time samples of 16 µs
2) Oscilloscope-2: trace duration of 64 ms and time samples of 256 µs.
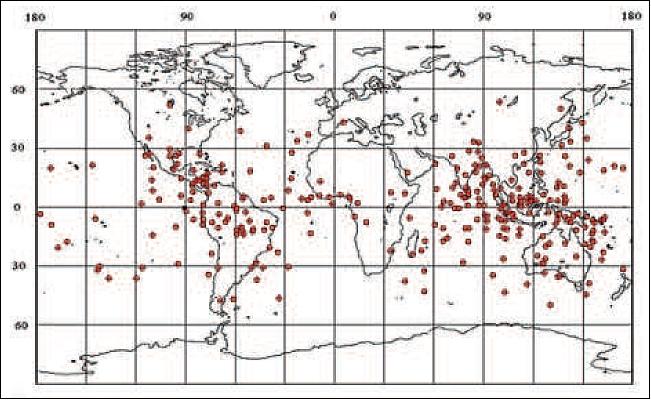
Due to the rather limited data acquisition system of the spacecraft, only one - i.e., the brightest UV flash in a given integral time (0.2 ms for the fast oscilloscope and 3.2 ms for the slower one), was selected during the night-side passage of the orbit. Among 14 orbits/day, only 3-5 orbits were available for UV measurements. In spite of these limitations, more than 300 UV flashes were detected throughout the mission. The results show, that the energy release in the UV range in the atmosphere for selected flashes is in the range of 10 kJ - 1MJ.
The Tatiana-1 spacecraft was operational from Jan. 21 2005 until March 7, 2007. 2) 3)
Spacecraft
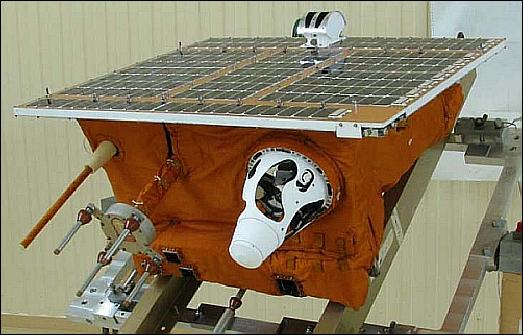
Tatiana-2 is a microsatellite designed and developed by NPP VNIIEM (All-Russian Scientific and Research Institute of Electromechanics), Moscow, Russia. A final contract was signed in May 2007. The design and manufacture of the spacecraft was mostly done by young engineers and students - giving them training and valuable experience. 4) 5)
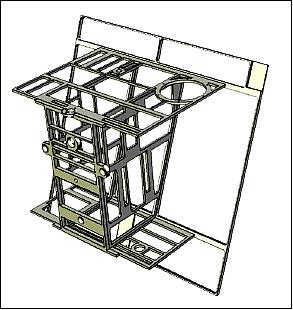
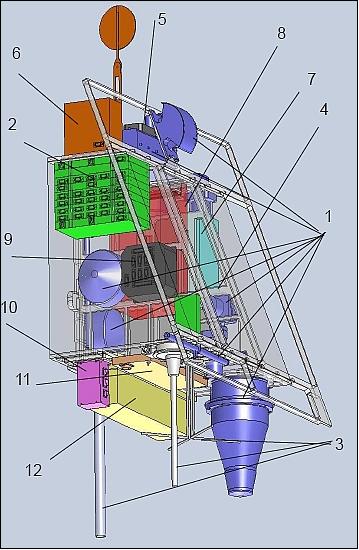
The basic load-carrying structure of the satellite represents a space frame (a prism with a trapeze in the profile - Figure 4), made from the titan. The frame units are made from a single sheet by a method of hydro-abrasive treatment and combined on non-magnetic bolts without welding, clinching and other processes whose manufacturing quality is difficult to check. Such design provides high manufacturability of manufacturing and a capability of repeated assembling-disassembling.
Mass of spacecraft | 98.2 kg, payload mass = 22 kg |
Spacecraft size | 1400 mm x 950 mm x 570 mm |
Spacecraft power | 35 W (average), use of a NiMH battery with a capacity of 15 Ah |
ACS (Attitude Control Subsystem) | - The spacecraft is 3-axis stabilized |
Thermal subsystem | Use of a passive system. It includes temperature sensors, a radiator, a frame-vacuum thermal isolation, and 3 slim heaters each of 5 W. |
Mission life time | 1-3 years |
RF communications | - L-band, 1.7 GHz, data rate = 665.4 kbit/s (science data) - Scientific data transfer capacity 100 MByte/day |
The components of the service platform: (the list compnent numbers pertain to those in Figure 5)
1) Attitude control system devices
- Sensor of a local vertical
- Sun sensor
- Angular speed sensor (3 pieces)
- Magnetometer
- Electromagnets (3 pieces)
- Engine-flywheels (3 pieces)
- Attitude control system controller
2) Onboard equipment of the satellite control
- The central controller
- Unit of radio channels
- Power distribution and telemetry controller
- Controller of power supply
- Navigation equipment.
3) Antennas of satellite control and scientific information transfer
4) Accumulator battery
5) Antenna of navigation system.
Payload Devices
6) BCU instrumentation: ETP (Electron Temperature Probe), MRM (Magneto-Resistive Magnetometer), and six temperature sensors
7) Unit of gathering, storage and transmission of scientific information
8) Microaccelerometer
9) BCKU - PC/104 onboard test computer and MEMS temperature sensors
10) Detector for UV (300-400 nm) and for red (600-700 nm) radiation
11) Detector for charged particles
12) Detector for flash image and flash spectrometer in the UV band.
ACS (Attitude Control Subsystem): The ACS if Tatiana-2 utilizes a 3-axis active electrical flywheel system with a digital control and an electromagnetic way of flywheel unloading. The ACS is shown on Figure 6. Onboard communications is provided by a CAN2 (Dual Controller Area Network) bus.
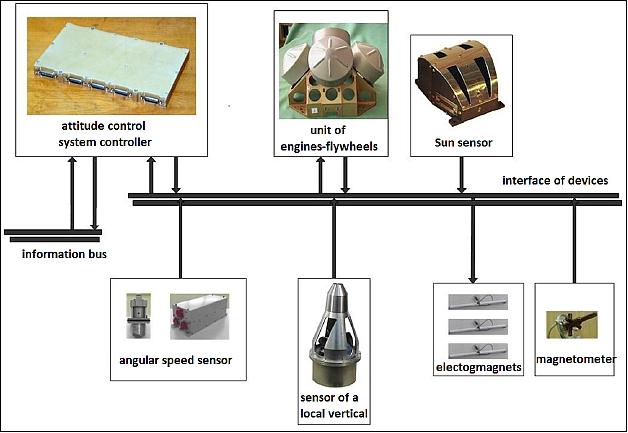
The ACS provides the following support modes:
- Damping (after spacecraft deployment from the launch system)
- Search for Earth orientation
- Sun search
- Orientation "Earth-Sun"
- Orientation "the Earth"- course"(for film-making equipment)
- Orientation "the Earth-Sun" without angular-speed sensors
- Orientation "the Earth-Sun" according to the magnetometer and navigating equipment
- Orientation "Sun".

Launch
The Tatiana-2 microsatellite was launched as a secondary payload on Sept. 17, 2009 on a Soyuz-2.1b/Fregat launch vehicle from the Baikonur Cosmodrome, Kazakhstan. The primary payload was Meteor-M-1 (~2700 kg) of Roskosmos/Roshydromet/Planeta, Russia.
The six secondary payloads on this flight were: 6) 7)
• Tatiana-2, also spelling of Tatyana-2 (Universitetsky-2, mass of 98.2 kg), a microsatellite of the Lomonosov Moscow State University (MSU), Moscow
• Sterkh-2 (a microsatellite of ~ 171 kg), will serve as Cospas-12 in the COSPAS-S&RSAT search & rescue network.. Sterkh-2 was built by PO Polyot.
• UGATUSat (a microsatellite of 30 kg) of Ufa State Aviation Technical University (UGATU), Russia, built by PO Polyot.
• ZASat-002 (SumbandilaSat, a microsatellite of 82 kg) of SunSpace, South Africa.
• BLITS (Ball Lens In the Space), a nanosatellite of 7.53 kg (sphere, reflector). BLITS was developed and manufactured by the IPIE center, under a 2006 agreement between Roskosmos and International Laser Ranging Service (ILRS). The purpose of the mission is experimental verification of the spherical glass retroreflector satellite concept.
• IRIS , an experimental unit attached to the Fregat upper stage, built be NPO Lavochkin and designed to test an inflatable and solidifying material in space.
Orbit: Sun-synchronous near-circular orbit, mean altitude = 825 km, inclination = 98.8º, period of 101.3 minutes, local equatorial crossing time at 12:00 hours. 8
Mission Status
• The Tatiana-2 spacecraft finished to operate on January 16, 2010 due to an attitude failure of the spacecraft. 9)
• Tatiana-2 has measured more than 1000 flashes during 3 months of its operation. 10)
- The total and peak UV energy flashes distribution were obtained from satellite data and the “trigger effect” was analyzed. Energy spectrum consists of three components: high energy with γ ~ -2, middle energy with γ ~ -1 (both components considered to be signals of TLE) and the low energy peak, whose origin is under analysis.
- The geographical distribution of flashes was found different for “high” and “low” energy flashes. Events of high energy are concentrated near equator and thunderstorm regions, low energy events distributed more even.
- The Red-IR/UV ratio varies in large range for all flashes. Low energy events (E < 1 kJ) have a larger Red-IR/UV ratio.
• The Tatiana-2 spacecraft is operational since her second orbit. The BCU data downlink started on her 52nd orbit on Sept. 20, 2009. 11) The first main TLE payload data were received on Oct. 21, 2009. All channels are working well. 12) After in-flight calibrations, data production for the main TLE instruments started in early January 2010.
Sensor Complement
The sensor complement of Tatiana-2 was selected to study the upper atmospheric environment and to search for some answers of the following questions:
1) What is the role of precipitating electrons and protons in the near-equator UV-radiation?
2) What is the distribution of the different discharges on the Earth's upper atmosphere?
3) How does the radiation spectrum change during the flares?
4) What electron flux goes out to the magnetosphere during electric discharges in the upper atmosphere?
5) Are there conjectured transient events (in geomagnetic field coordinates) in the atmosphere?
6) What is the nature of the links between the UV flares and the Moon phases?
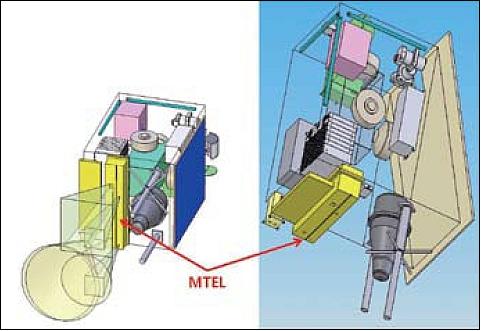
MTEL (MEMS Telescope for Extreme Lightning)
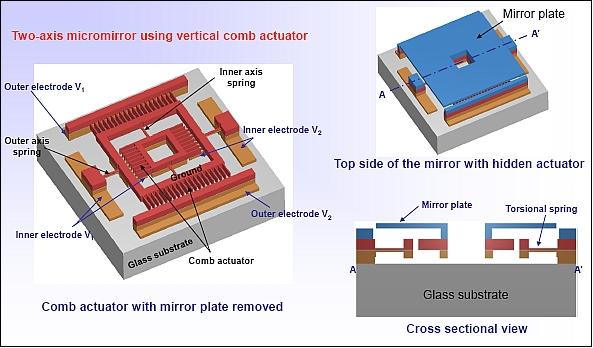
MTEL is a new type of leading edge WFOV (Wide Field of View) telescope designed and developed at the Ewha Womans University (EWU), Seoul, Korea (PI: Jae-Hyoung Park). MTEL uses MEMS micromirrors to observe very fast occurring atmospheric phenomena. The objective is to demonstrate and qualify this TLE (Transient Luminous Emissions) technology (including the TLE tracking capability) in space. The science objectives include: 13) 14) 15)
- Observation of the first instance of a TLE occurrence
- Precise measurement of the space-time development of a TLE
- Simultaneous measurement of red and blue spectrum of TLE.
Three steps of realization:
1) Prove the idea with a small array (3 mm x 3 mm) → to track and observe TLEs from space
2) Build a reflector of a wafer size (10 cm x 10 cm) → to be able to track short GRBs (Gamma Ray Bursts) from space
3) Enable the development of a larger compound mirror reflector (> 1 m x 1 m) → to be able to track UHECR (Ultra High Energy Cosmic Ray) emissions from space in the future.
Instrument component | Configuration | Specification |
Optics | Baseline configuration | - F=1 trigger optics: 10 cm Fresnel lens |
Advanced option | - Double Fresnel lens optics | |
MEMS micromirror | Baseline configuration | - 10 cm micromirror array |
Detector array called | Baseline configuration | - UV sensitive multi-anode PMT Hamamatsu R5900M64 (350~400 nm, 64 channel, 26 mm x 26 mm) |
Advanced option | - Silicon photomultiplier |
So far the space-time development of TLEs has been mainly observed using CCD cameras. The CCD cameras, however, have a typical time resolution of tens of ms (milliseconds).
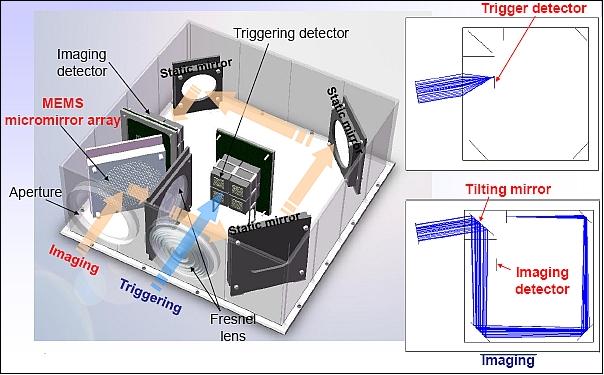
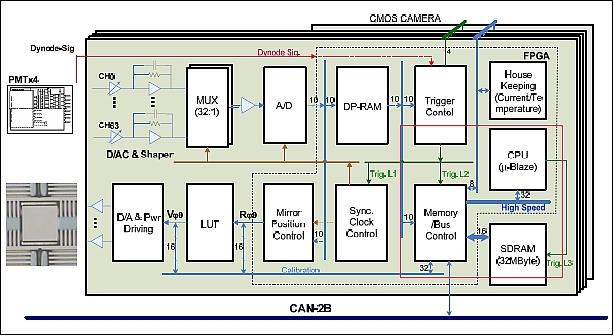
The MTEL space telescope is equipped with a fast tilting MEMS micromirror array and MAPMT (Multi-Anode Photomultiplier Tube) photodetectors. The rapid tilting of the MEMS micromirror array and the fast response of the photo detectors to lights make the telescope capable of observing the space-time development of TLEs with a time resolution of 1,000 times better than CCD cameras.
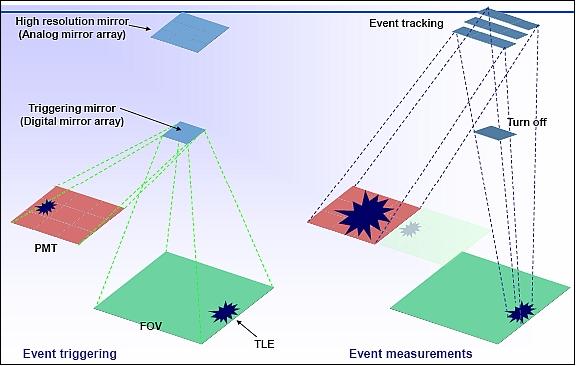
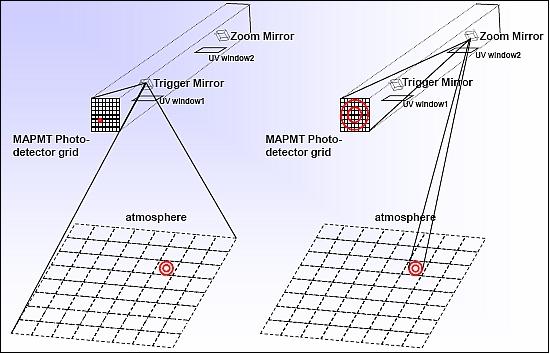
The trigger mirror (a conventional fixed plane mirror) and a 64-channel MAPMT, positioned close to it, forms a trigger camera. The trigger camera monitors a wide field of view due to its short focal length. The zoom mirror (a MEMS micromirror array) and another MAPMT photodetector positioned far from it, forms a zoom-in camera. The zoom-in camera can zoom an image due to its long focal length.
When the trigger camera detects and triggers an event of interest, it determines the position of the event and provides the position to the zoom-in camera. Then the zoom-in camera tracks the event and zooms into the event, which leads to the observation of the space-time development of TLEs with higher lateral resolution.
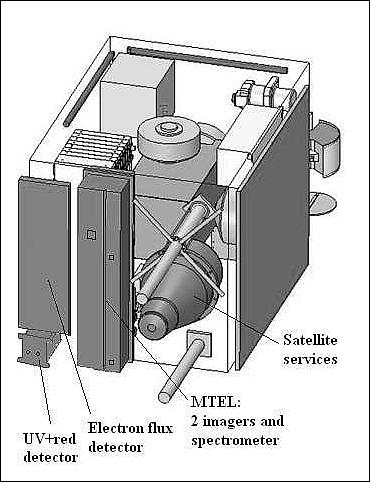
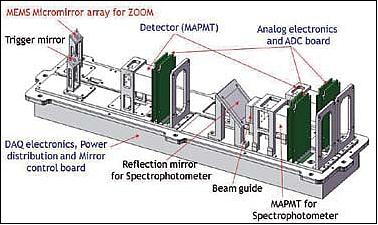
The MTEL consists of three sub-components: Trigger camera (T1), Zoom-in camera (T2), and Spectrophotometer (S3). T1 is a pin-hole camera which is looking in Earth direction (nadir view) - observing an instantaneous area of 160 km x 160 km with a resolution of 20 km x 20 km. It provides T2 and S3, a fast trigger derived from the information on the 64-channel UV sensitive MAPMT. T2 consists of 64 cell micromirror array to make a zoom-in of a TLE event triggered by T1. The resolution of T2 is 5 km x 5 km. The same UV sensitive MAPMT is used. S3 has 8 different filters in front of a wide wavelength sensitive (300-800 nm) 64-channel MAPMT.
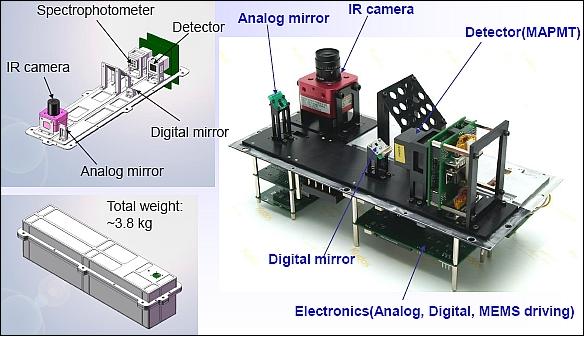
Mass of MTEL assembly | 4.5 kg |
Power consumption | 6 W |
Instrument size | 150 mm (d) x 144.5 mm (w) x 120 (h) mm |
Data rate | 400 Mbit/day (max) |

MTEL on ISS
The prototype MTEL assembly has been delivered to the ISS (International Space Station) in February 2008 (on flight STS-122, Feb. 7-22, 2008) and it has successfully observed the transient lights during the seven days mission of the first Korean Astronaut in April 2008. Figure 18 shows the prototype installed at the UV-transparent earth-viewing observation window of the ISS by So-Yeon Yi.

The importance of the prototype, even though its mission period was merely seven days, was its successful operation with the MEMS micromirrors in the space environment, thus providing a space-flight heritage to the future space instruments produced with this technology.
NUV+R (Near-Ultraviolet and Red radiation) detector
The NUV+R instrument provides measurements in two spectral ranges: 300-400 nm (NUV), and 600-700 nm (red radiation). The radiation of both ranges is detected by PMTs (Photomultipliers) of Hamamatsu (R1463). The front optics is using filters to split the radiation into the two ranges. The FOV (Field of View) is 32º. There are two operational modes: monitoring of the atmosphere's luminescence with a 4 second step, and the measurement of the radiation flares.
SFD (Scintillation Flux Detector)
The objective is to measure the charged particle flux using a scintillation detector of size: 400 cm2. Two observation modes are being used: a) monitoring of the electron flux, and b) selection of the electron flux which occurs during flux splashes. The scintillation detector is controlled either by the events selected by the NUV+R detector, or by the events selected by the scintillation detector. One of these variants is chosen by the command from the control center.
BCU (Block of Central University) Payload
The BCU instrumentation package, designed and built by NCU (National Central University) and NCKU (National Cheng-Kung University), Taiwan, consists of the following devices: ETP (Electron Temperature Probe) and MRM (Magneto-Resistance Magnetometer). The objective of the BCU payload is to study space weather features as well as earthquake induced signatures in the terrestrial ionosphere. 16)
Background: Under an "Interuniversity Scientific - Education Program of Space Researches," signed in July 2006, NCU (National Central University) contributed their instruments BCU (Block of Central University) - namely ETP (Electron Temperature Probe) and MRM (Magneto-Resistance Magnetometer) for space weather studies, and BCKU (of NCKU) for satellite control processor experience, respectively. The NSPO (National Space Program Organization) of Taiwan funded the instrumentation developments and allocated US $1.5M particularly for the development and launch of the satellite. The universities also pitched in funds for installing their instruments onto the satellite. Measuring in-situ space weather conditions, BCU was to provide information which might be correlated to the TLE detection. 17)
Figure 19 shows the front and back view of the payload. The BCU circuits and most of the sensors were packaged in the same enclosure, which is an aluminum-alloy chassis of the size 150 mm x 150 mm x 85 mm with a mass of 1.6 kg. The ETP electrode is mounted at the end of a 32.4 cm probe rod extending upward from the top wall of the front panel of the chassis. The power and communication connectors to the satellite are located in the rear panel of the chassis.
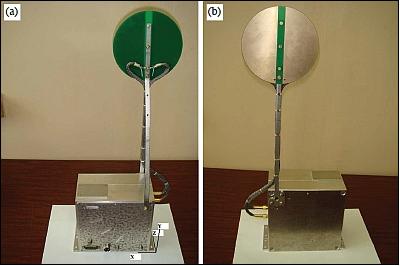
Legend to Figure 19: In the front view, the left hemisphere of the ETP probe is the reference electrode "Pref" and the right is the driven measurement electrode "P".
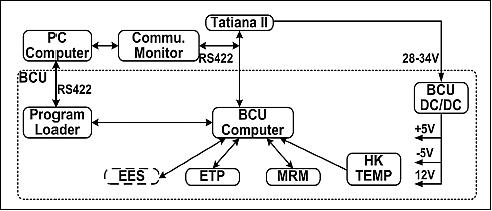
The functional block diagram of the BCU payload is given in Figure 20. The BCU is composed of the DC/DC power converters, the main instruments – ETP, MRM and EES (Electron Energy Spectrometer), only to the design stage), a BCU computer called DPU (Data Processing Unit), a program loader (PL), and a set of temperature sensors. Peripheral support system includes the communications monitor (CM) and a PC (Personal Computer).
Note: due to mass constraints of the BCU and need to meet the satellite launch schedule, the project withdrew the EES from further development of the flight module.
The electrical interfaces to Tatiana-2 are through a single power input and a single serial communication port (RS422). The DC/DC converters convert the 28 V ~ 34V DC into ±5 V, and 12 V as required by the payload. Via the RS422 interface, the computer of Tatiana-2 issues instructions and gets responses to/from the DPU. The purpose of the CM is to monitor the RS422 communications between the Tatiana-2 and the DPU. The data acquired by the CM is sent to the PC, which forms the basis of references for the staff members to handle the debugging during the satellite-payload integration test. The PC can also, via RS422, communicate with the PL that reads and writes programs from/into the DPU’s program memory.
ETP (Electron Temperature Probe)
Electron temperature probe was invented by K. Hirao and improved by K. Oyama in Japan in early 1970. 18) 19)Since then, the ETP became a popular instrument for measuring the electron temperature in the ionosphere. The probe has been installed on many of international satellites because the operation of ETP is less sensitive to the potential sheath structure of its enveloped electrodes.
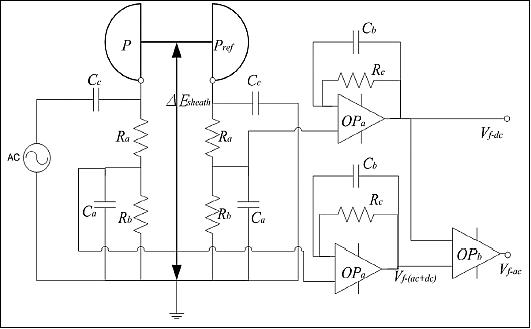
Figure 21 depicts the functional elements of the BCU-ETP circuit system. The system includes two electrodes (plates P and Pref), AC generator, resistors, capacitors and three OP (Operational Amplifiers). Figure 22 is a functional block diagram of the circuit. As the reference electrode passes through the plasma, a voltage difference with respective to ambient plasma (ΔEsheath) is generated. When this largely negative potential is applied to the referenced electrode, the voltage difference (ΔEsheath) drives a current, idc, through the plasma-electrode junction. The current charges the capacitor (or RC circuit) to increase the reference-electrode voltage until the balance of the current (zero current) is reached. Then, the voltage of the referenced electrode defines the DC floating voltage (Vf - dc).
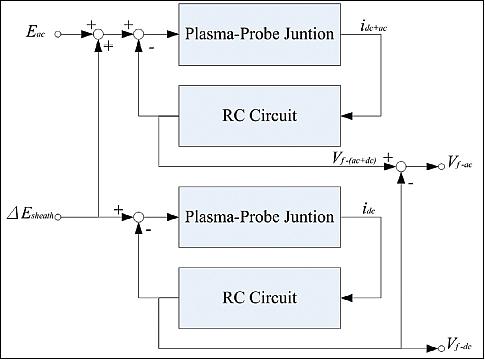
In addition to ΔΕsheath, an AC voltage Eac is superimposed on the other electrode (i.e., the measurement-electrode plate). Again the net voltage difference drives the i(dc + ac) current through the plasma-electrode junction and charges the capacitor RC circuit until reaching another floating (balance) voltage Vf - (dc + ac). The difference between Vf - (dc + ac) and Vf - dc is the AC floating voltage shift Vf - ac. For the BCU-ETP the project fixed the frequency at 30 kHz, but vary the Eac in three phases which are 0.5, 0.25, and 0 V, respectively, to measure the floating voltage shifts. The time duration for each phase takes 150 ms since after each change of the AC amplitude it is required to wait for the signal to become stable before the measurements are taken. Post-processes enable the electron temperatures to be derived from the measurements of the floating voltage shifts. However, the AC current can induce electromagnetic radiation, which may cause electromagnetic interference to the other circuits. We therefore need to carefully arrange the timing of the ETP AC-voltage excitation as well as the data taking in order to complement with the other instruments (Ref. 16).
MRM (Magneto-Resistance Magnetometer)
The small MRM is packaged together with the ETP and supporting subsystems of the BCU into a 1.6 kg payload box for convenient installation. 20)
The AMR resistor is made of nickel-iron (Permalloy) thin film deposited on a silicon wafer and is patterned as a resistive strip. The resistance of an AMR resistor varies with ambient magnetic field and temperature. An AMR sensor is composed of four magnetic resistors arranged as a Wheatstone bridge. The BCU system uses three identical designed AMR sensors to measure the three-dimensional vector components of the Earth's magnetic field with a resolution of 23 nT, and a sampling frequency of 2.22 Hz during flight mission (Ref. 16).
The MRM magnetometer was built to meet the scientific requirement of the payload project off the AMR (Anisotropic Magneto-Resistive) sensors.
AMR sensor: There are many small regions called “magnetic domains” inside an AMR resistor; four AMR resistors form an AMR sensor chip in general, as shown in Figure 23 . An AMR resistor must be placed under a magnetic field strong enough to magnetize all its magnetic domains in one direction (called “easy-axis,” as indicated in Figure 23 a) before it can be used to sense weak magnetic fields. To maintain sensitivity and error-free operation, the AMR sensor needs to be periodically magnetized by the built-in coil generated strong magnetic field in the scenario of use. The measurement of three-dimensional magnetic field could also be achieved by combining three AMR sensors into a magneto-resistive vector magnetometer.
Since the AMR sensor chip is a resistive electronic component, it can be driven by constant voltage or constant current methods without complex driving circuits. Compared with fluxgate magnetometers, the magnetoresistive magnetometers have advantageous features in their small size, low power consumption and simple driving circuit.
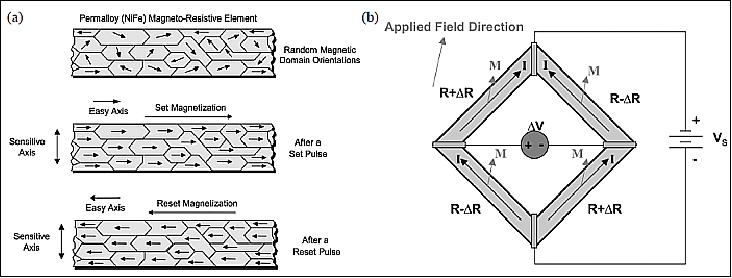
Legend to Figure 23: (a) magnetic domains inside an AMR resistor with random orientation and two states of magnetization; (b) an AMR sensor consists of 4 AMR resistors.
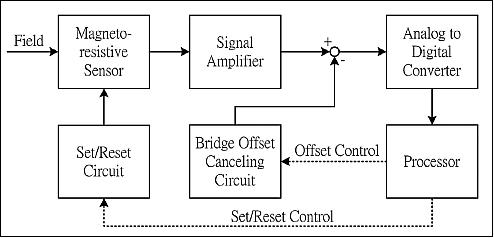
As shown in Figure 24, the magnetic field first forces the AMR sensor to change its resistance, which is transduced into a differential voltage signal. Then the voltage signal is amplified and the offset voltage is removed. Finally the analogue voltage signals are acquired as digital data by the ADC (Analog-to-Digital Converter). The offset voltage arises from several sources. The offset voltage comes from the cross-axis field contribution called the “cross-axis effect;” another offset voltage comes from an unbalanced Wheatstone bridge of the AMR sensor under a zero magnetic field circumstance called a “bridge offset.” A combination of other offsets originating from the signal amplifier, offset control and ADC is called a “circuit offset.”
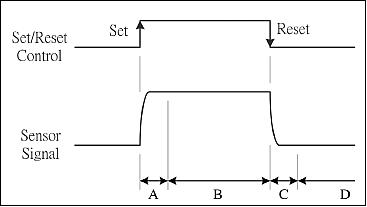
Control sequence: In order to maintain high sensitivity and compensate the offset of the sensor, the magnetizing procedure is carried out before taking every MRM measurement. For purposes of cancelling the bridge offset as well as eliminating the cross-axis effect and circuit offset, the polarity of magnetizing current is alternated between a “Set-state” and “Reset-state.” As shown in Figure 3, one full cycle of measurement contains “Set-state” switching and “Set-state” data sampling phases (phase A and B), and “Reset-state” switching and “Reset-state” data sampling phases (phase C and D). Because the sensor signal is flipping at the moment of “Set/Reset” switching, a short period of settling time (phases A and C) is required before the data is acquired.
With properly designed control sequence and the implementation of a “Set/Reset” magnetizing procedure to compensate the offset of the sensor, the MRM is able to provide good quality data. Even though the MRM on Tatiana-2 is subjected to a magnetic bias of 0.146 Gauss, its measurement can be successfully calibrated to that of the main TM magnetometer of Tatiana-2.
Although the MRM was sampled at only 2.2 Hz due to a limited downlink budget for the BCU, the phenomenon of field-aligned current at high latitudes is observed by the detection of the magnetic field disturbances perpendicular to the current. The measured current density is about 2 ~ 3 µAm2. It proves that the MRM and its supporting payload system are space qualified to survive at least 4 months for the detection of magnetic field variations with expected magnitude and spatial extent typically induced by the field-aligned currents.
DPU (Data Processing Unit)
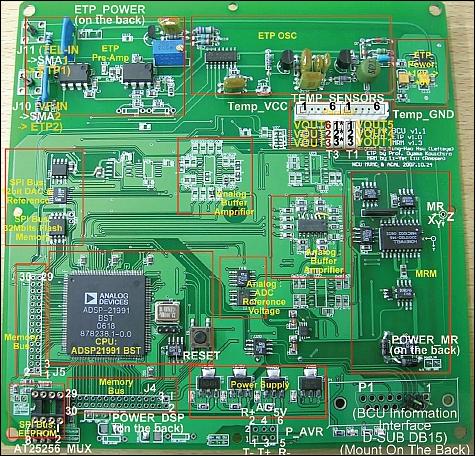
The DPU, as the brain of the payload cluster, is responsible for the sensors operation, data acquisition, data packaging, data buffering and uploading data to satellite. The DPU uses a 16-bit digital signal processor from Analog Devices Inc. with 160 MHz core clock frequency and 128 kB internal memory. The range of operating temperature is from -40 ºC to 85 ºC. The DPU consists of a built-in 8-channel/14-bit ADC , SPI (Serial Peripheral Interface) ports, digital I/O and RS422 communication interface ports. There are external components on the circuit board including 4 MB static memory (SRAM), 6.4 MB flash memory, a pair of one to six analog multiplexers (MUX) for temperature sensors, and an 8-channel/12-bit DAC (Digital-to-Analog Converter).
It takes up 2 and 3 ADC channels, respectively, for the outputs of ETP and MRM measurements. Through the multiplexer, the six temperature sensors share one ADC channel. The MRM uses 3 DAC channels to adjust the offsets. The DPU also uses digital outputs to control the measurement phases of the instruments. To perform the ETP sinusoidal amplitude switching, two digital outputs are used. The MRM Set-Rest current impulse control takes one digital I/O.
C&DH (Command and Data Handling): The data measured by the scientific payloads is transmitted to the ground via the satellite telemetry for post-flight analysis. In order to improve the autonomy of scientific measurement by the BCU and to minimize the dependency of the BCU on the satellite’s commands for instrument operation and data handling, the BCU payloads have their own data processing unit, and sufficient buffer memory to buffer the data to be collected.
The instruments of ETP and MRM were integrated with a DPU into the MEP (Main Electronics Package) which is controlled by the in-house developed flight software. The BCU MEP performed very well in the flight operations.
References
1) A. V. Dmitriev, G. K. Garipov, O. R. Grigoryan, B. A. Khrenov, P. A. Klimov, L. L Lazutin, I. N. Myagkova, A. N. Petrov, V. L. Petrov, M. I. Panasyuk, V. I . Tulupov, V. M. Shahparonov, A. V. Shirokov, N. N. Vedenkin, I. V. Yashin, J. A. Jeon, S. M. Jeong, A. Jung, J. E. Kim, W. S. Kim, J. Lee, H. Y. Lee, G. W. Na, S. W. Nam, S. J. Oh, I. H. Park, J. H. Park, J. Y. Jin, M. Kim, Y. K. Kim, B. W. Yoo, Y.-S. Park, H. J. Yoo, C. H. Lee, H. I Salazar, O. B. Martinez, E. L. Ponce, J. P. Cotsomi, “UV data of the 'Universitetskiy-Tatiana-1' satellite and plans for the Tatiana-2,” Workshop on Coupling of Thunderstorms and Lightning Discharges to Near-Earth Space, June 23-27, 2008, University of Corsica, Corte, France
2) “MSU Program on the development of the University scientific-educational satellites,” URL: https://web.archive.org/web/20101201103604/http://space.msu.ru/eng/projects/
3) P. A. Klimov, G. K. Garipov, B. A. Khrenov, M. I. Panasyuk, H. Salazar,, V. I. Tulupov, I. V. Yashin, “The atmosphere UV background phenomena measured by detector on-board “Tatiana” satellite,” Proceedings of the 30th International Cosmic Ray Conference (ICRC'07), Universidad Nacional Autónoma de México, Mexico City, Mexico, 2008, URL: http://indico.nucleares.unam.mx/getFile.py/access?contribId=138&sessionId=67&resId=0&materialId=paper&confId=4
4) L. A. Makridenko, K. A. Bojarchuk, A. V. Gorbunov, V. A. Kozhevnikov, M. Ju. Jurev, A. N. Zaporozhtsev, I. V. Kutsak, V. I. Romanov, S. V. Dorozhkin, A. L. Rymov, R. N. Kolosov, P. A. Chudnovskij, A. D. Belenkij, M. E. Semenov, E. S. Karavaeva, A. V. Lebedev, V.Ja.Gecha, N.A.Bazarova, V.N.Chukalovskij, I.J.Pugach, V.P.Papkov, ,D.S.Naumenko, V.A.Sadovnichij, S.J.Bobrovnikov, V. V.. Aleksandrov, S. S. Lemak, “The small spacecraft 'Universat-Tatyana-2,'” UN/Austria/ESA Symposium on Small Satellite Programs for Sustainable Development: Payloads for Small Satellite Programs, Sept. 21-24, 2010, Graz, Austria
5) Vladimir Gecha, Elena Kanunnikova, Igor Pugach, “All-Russian Scientific Research Institute of Electromechanics (VNIIEM),” URL: http://www.ciemat.es/sweb/Spain-ISTC-STCU/22abril/vniiem1.pdf
6) http://orbiter-forum.com/showthread.php?p=120297#post120297
7) http://www.russianspaceweb.com/meteor.html
8) http://smdc.sinp.msu.ru/index.py?nav=tat2
9) Information provided by Boris A. Khrenov, SINP ( Skobeltsyn Institute of Nuclear Physics), Moscow State University (MSU), Moscow, Russia.
10) G. K. Garipov, B. A. Khrenov, P. A. Klimov, V. S. Morozenko, M. I. Panasyuk, V. I. Tulupov, V. M. Shahparonov, S. A. Sharakin, S. I. Svertilov, N. N. Vedenkin, I. V. Yashin, H. I Salazar, O. B. Martinez, E .L. Ponce, J. P. Cotsomi, I. H. Park, “UV And Red-IR Radiation Flashes Energy, Characteristics Measured by UV&IR Detector On-Board “Universitetsky-Tatiana-2” Satellite,” Nor Amberd, Armenia, September 6-11, 2010, URL: http://crd.yerphi.am/Conferences/tepa2010/files/presentations/Klimov.ppt
11) Tse-Liang Yeh, Huey-Ching Yeh, Shyh-Biau Jiang, Ko-Ichiro Oyama, Jann-Yeng Tiger Liu, “Milestones of ESEMS - BCU Project Development,” URL: http://140.115.66.87/nspotr/nspotr98b20process1.png
12) “Ultra-Fast Flash Observatory for detecting the early photons from Gamma Ray Bursts,” International Workshop on Nuclear, Particle and Astrophysics Yongpyong, Korea, Feb. 21-25, 2010, URL: http://q2c.snu.ac.kr/indico/getFile.py/access?contribId=23&sessionId=0&resId=0&materialId=slides&confId=55
13) I.-H. Park, “MTEL (MEMS Telescope for Extreme Lightning), Pathfinder of MEMS Adaptive Space Telescope,” International Symposium on Astronomy and Astrophysics of Extreme Universe, March 22-23, 2007, RIKEN, Japan, URL: http://jemeuso.riken.jp/AAEU/p/park.pdf
14) S. Artikova, G. Garipv, B. Khrenov, P. Klimov, “MEMS Telescope for Observation of Transient Luminous Events,” URL: http://him.phys.pusan.ac.kr/~kps/kps2007fall/19/1/1Park.pdf
15) J. A. Jeon, J. Y. Jin, A. R. Jung, S. M. Jeong, J. E. Kim, M. Kim, Y. K. Kim, C.-H. Lee, H. Y. Lee, J. Lee, G. W. Na, J. W. Nam, S. Nam, I. H. Park, J. H. Park, Y.-S. Park, J. E. Suh, B. W. Yoo, H. J. Yu, B. A. Khrenov, G. K. Garipov, M. Panasyuk, P. Klimov, B. Grossan, H. Lim, E. V. Linder, G. F. Smoot, “A Few Selected Research Topics of Research Center of MEMS Space Telescope,” Astronomy and Astrophysics in Korea, AAPPS (Association of Asia Pacific Physical Societies) Bulletin, August 2009, Vol. 19, No. 4
16) Shyh-Biau Jiang, Tse-Liang Yeh, Huey-Ching Yeh, Jann-Yeng Liu, Ying-Hao Hsu, Li-Yeh Liu, “System Architecture of the BCU Payload on Tatiana-2,” Terrestrial Atmospheric and Oceanic Sciences, Vol. 23, No. 2, pp. 193-208, April 2012, doi: 10.3319/TAO.2011.09.20.01(AA), URL: https://web.archive.org/web/20151029051150/http://tao.cgu.org.tw/pdf/v232p193.pdf
17) Information provided by Tse-Liang Yeh, Institute of Opto-Mechatronics Engineering, National Central University, Jhongli, Taiwan, ROC
18) K. Hirao, K. Oyama, “Effect of Electron Heating on the Electron Temperature Probe,” Journal of Geomagnetism and Geoelectricity, Vol. 22, 1970, pp. 341-352.
19) K. Hirao, K. Oyama, “An Improved Type of Electron Temperature Probe,” Journal of Geomagnetism and Geoelectricity, Vol. 22, 1970, pp. 393-402
20) Li-Yeh Liu, Shyh-Biau Jiang, Tse-Liang Yeh, Huey-Ching Yeh, Jann-Yeng Liu, Ying-Hao Hsu, Ji-Yi Peng, “The Magneto-Resistive Magnetometer of BCU on the Tatiana-2 Satellite,” Terrestrial Atmospheric and Oceanic Sciences, Vol. 23, No. 3, pp. 317-326, June 2012, URL: https://web.archive.org/web/20151029043902/http://tao.cgu.org.tw/pdf/v233p317.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).