UKube-1 (United Kingdom Universal Bus Experiment 1)
Non-EO
UKSA
Quick facts
Overview
| Mission type | Non-EO |
| Agency | UKSA |
| Launch date | 08 Jul 2014 |
| End of life date | 27 Oct 2015 |
UKube-1 (United Kingdom Universal Bus Experiment 1)
Overview Spacecraft Launch Mission Status Payload technology demonstrations Ground Segment References
UKube-1 is a pilot project of UKSA (United Kingdom Space Agency), announced in July 2010, to launch Britain's first CubeSat. The project will use a 3U CubeSat platform that is currently under development by the company Clyde Space Ltd. of Glasgow and will involve a competition amongst companies and academic groups to come up with the most innovative ideas for payloads. 1) 2) 3) 4) 5)
UKube-1 is a collaboration between the UK Space Agency, industry and academia. The funding partners for UKube-1 are the UK Space Agency, the Technology Strategy Board and STFC (Science and Technology Facilities Council). The spacecraft is being developed through a Knowledge Transfer Partnership with the Scottish company Clyde Space and the University of Strathclyde, supported with internal funding from Clyde Space. The UK's largest space company, EADS Astrium Ltd, is providing engineering and program management support to the Agency for the pilot program. UK industry and academia are providing the payloads and the ground support operations. 6) 7)
UKube-1 is the first mission of the newly formed UK Space Agency. The following five core mission objectives, the majority of which will be fulfilled before the Spacecraft reaches the launch pad.
1) UKube-1 shall demonstrate new UK space technology
2) UKube-1 shall demonstrate the capability of useful science to be performed within a CubeSat sized spacecraft
3) UKube-1 shall demonstrate industry and university university based training in spacecraft development
4) UKube-1 shall demonstrate education and outreach in STEM (Science, Technology, Engineering, Mathematics) subjects
5) UKube-1 shall demonstrate Payload Kick-Off to flight qualified spacecraft in < 12 months.
The requirements call for the support of at least 3 primary payloads. The UKube-1 project features 5 payloads.
The following institutions/companies/entities are involved in the development of UKube-1: UKSA, Bright Ascension, CSL (Clyde Space Ltd.), EADS Astrium Ltd., AMSAT UK, University of Strathclyde (Glasgow), Open University, University of Bath, UKSEDS, RALSpace, University of Dundee, Steepest Ascent Ltd., Glasgow, Cape Peninsula University of Technology (CPUT, Cape Town, South Africa), Commercial Space Technologies, SciSys, Knowledge Transfer Partnerships, Technology Strategy Board, Gomspace, ISIS [Innovative Solutions In Space BV (Delft, The Netherlands)], Pumpkin Inc. 8) 9)
Some steps on the way to a project:
• In March 2011, 4 payloads were selected from 22 proposals
• As of July 2011 Clyde Space has accepted the role of Prime for the mission, with overall responsibility for the delivery of the complete mission.
• The CDR (Critical Design Review) of the mission took place on Nov. 3-4, 2011. 10)
Spacecraft
The UKube-1 platform is being developed by Clyde Space and the University of Strathclyde. The UKube-1 features a 3U CubeSat form factor, a nanosatellite of size 10 cm x 10 cm x 34 cm and a mass of ~3.5 kg. 12) 13)
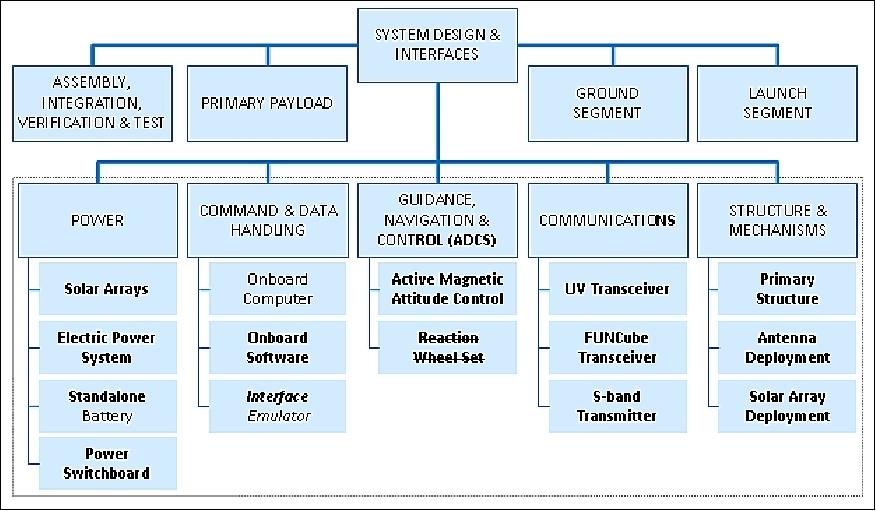
The UKube-1 mission is broken into ten elements including the overall system design as given in Figure 2. Five areas are directly responsible for delivery of the hardware for the platform systems within Clyde Space, with the ground, (Primary) payload and launch providers selected by the UKSA with system design support. Assembly, integration, verification and test of the platform is the responsibility of Clyde Space, prior to delivery to the UKSA for launch.
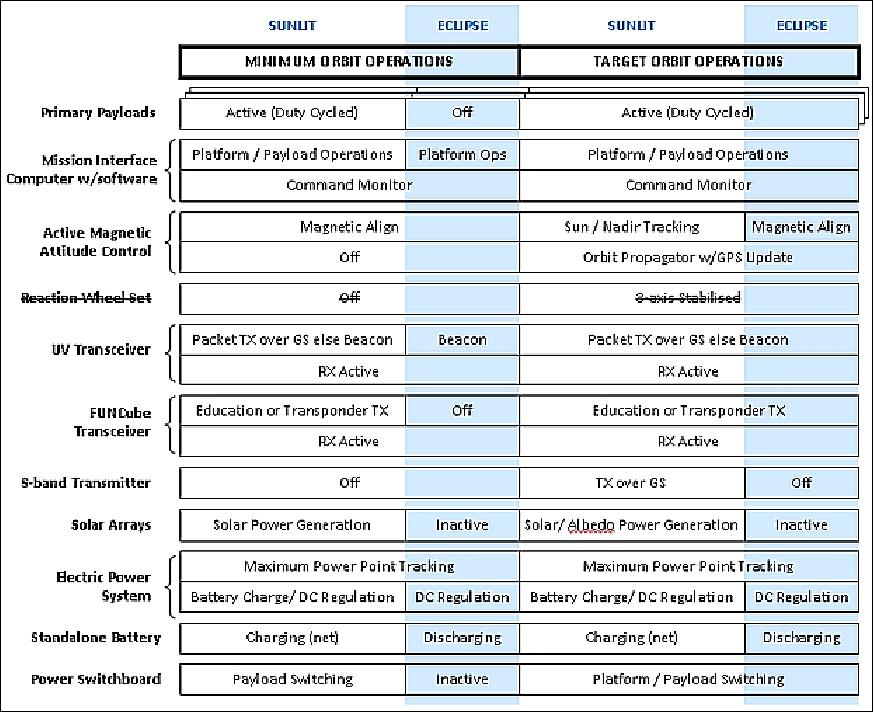
Nominal mission: The majority of the mission shall be spent in nominal operations, starting 2-3 months after launch.
Platform Technology and Subsystems
All platform subsystems have some new elements, the major developments for UKube-1 are:
STX (S-band Transmitter) | High data rate downlink up to 1 Mbit/s |
AMAC (Active Magnetic Attitude Control) | The target is to achieve a pointing accuracy of ±5º |
MIC (Mission Interface Computer) | Reconfigurable high performance computing |
SFW (Onboard Software) | The software is service oriented and follows a modified PUS CCSDS standard software architecture |
SADM (Solar Array Deployment Mechanism) | Higher power through solar array deployment |
IE(Interface Emulator) | Platform-Payload interface emulator |
Platform structure: A Pumpkin off-the-shelf (skeletonized) STR (Primary Structure, 3U CubeSat) with integrated separation microswitch is used.
ADM (Antenna Deployment Mechanism): An omnidirectional UV monopole whip antenna for the FUNCube and UV TRX (UV Transceivers) will be deployed from the ISIS off-the-shelf ADM, controlled by the platform I2C data bus and routed through the FUNCube Transceiver.
SADM (Solar Array Deployment Mechanism): Deployment of the deployable solar arrays uses a Clyde Space developed SADM, consisting of release by resistive hot wire cutters and hinge mechanisms for array deployment to 135º from the face surface.
AMAC (Active Magnetic Attitude Control): Basic guidance, navigation and control functionality uses a Clyde Space developed AMAC subsystem targeting a 2-axis pointing capability of ± 5º and sensing to 1º. Actuation is provided by a set of 6 magnetorquers (0.15 Am2 in XY and 0.12 Am2 in Z) embedded in the surface mount solar arrays, and sensing by a MEMs IMMU (Inertial & Magnetic Measurement Unit) consisting of gyros, accelerometers and magnetometers, and coarse sun sensors are mounted where volume allows on the solar arrays. A daughterboard containing a GPS interface is attached to the motherboard fed from the TOPCAT GPS receiver, with its antenna mounted in the +X surface mount solar array. Magnetic control is augmented with a 0.09 Am2 permanent magnet in the Z body axis.
EPS (Electric Power Subsystem): Power conditioning using a Clyde Space off-the-shelf next generation EPS, with 6 maximum power point tracking battery charge regulators providing protected 3.3 V @ 4 A, 5 V @ 4 A, 12 V @ 1 A, and battery V @ 4 A primary power lines. The subsystem also incorporates the Flight Activation System of Separation Microswiches, and the Flight Interface with External 5 V (TBC) USB Charge and Remove-Before-Flight pin.
• SAs (Solar Arrays): Use of off-the-shelf Clyde Space SAs with customized cut-outs. A total of 56 UTJ (Ultra Triple Junction, SpectroLab) standard solar cells are mounted on all faces to allow power generation at any attitude, although cell positioning is biased to the expected magnetic alignment, to produce a minimum typical power of 3.8 W worst case (estimated assuming pitch spin about XZ body axis. Two double sided cell deployable solar arrays (SA-D) are deployed in a centipede configuration along the longitudinal axis of the spacecraft, and a third as a spoiler. All surface mount solar arrays incorporate embedded magnetorquers, coarse sun sensors, the option for FSS (Fine Sun Sensors) in addition to cutaways through the panels for specific subsystems.
• Power storage uses an off-the-shelf Clyde Space 30 Whr standalone battery (BAT) based on soft-cased lithium polymer technology. The battery cells are arranged 2S3P, with a nominal voltage of 7.9 V.
• Power distribution uses a Clyde Space power switchboard (SWB) module with 18 switches to allow on/off switching of payload and auxiliary secondary power lines at the same voltages as the primary power lines (3.3, 5, 12, and BAT V). Each switch has overcurrent protection 10% above peak draw and inrush tolerance to 2 A over 10 ms.
OBC (OnBoard Computer): Platform and payload operations, C&DH (Command and Data Handling) uses a Gomspace Nanomind A712D with an ATMEL processor, 2 MB SDRAM, 4 MB FLASH and 2 GB SDCARD.
The onboard software (SFW) is embedded primarily in the OBC, the software uses an operation schedule for allocating resources to the payloads. The software is service oriented and follows a modified PUS CCSDS standard software architecture.
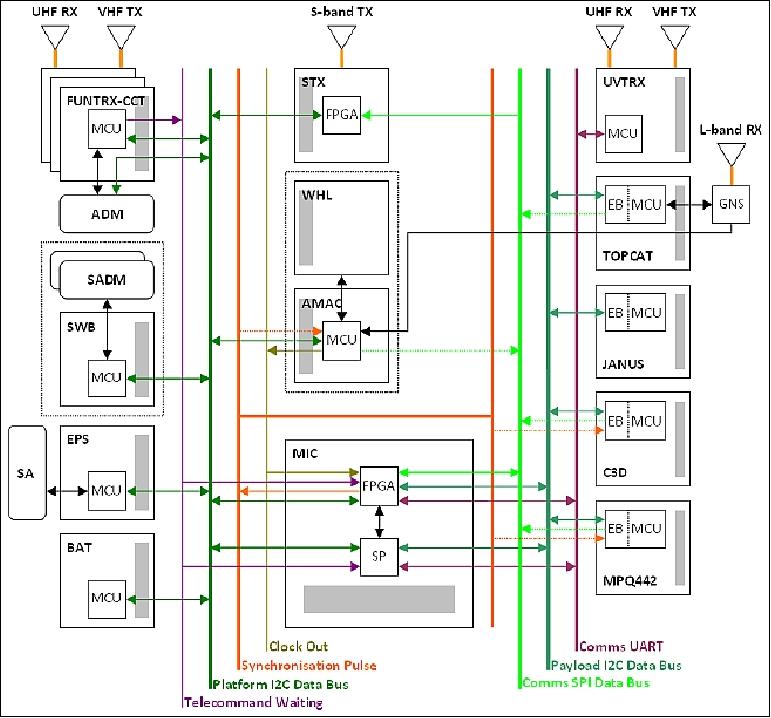
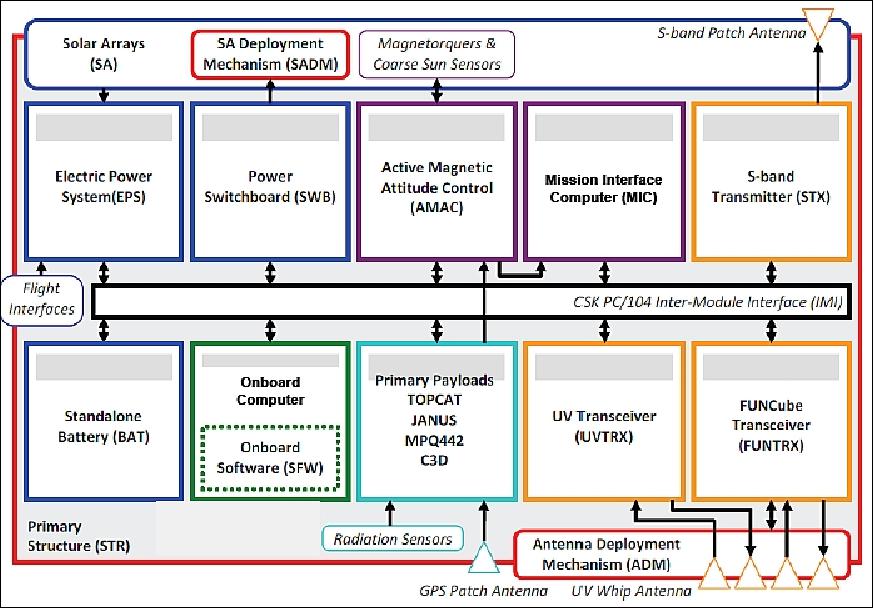
IMI (Inter-Module Interface): A common IMI between the subsystems uses the CSK PC/104 format headers, standoffs and boards for interfacing between internal modules within the STR (Primary Structure). Internal modules shall be stacked in the longitudinal axis, with 104 pins within the stackable headers providing all common data and power bus lines and signals. Six sets of up to four power buses shall distribute power through the interface in groups of 3.3 V, 5 V, 12 V and BAT V (where required):
• Primary power buses distributing to critical platform subsystems directly from the EPS (Electric Power Subsystem).
• Auxiliary power buses distributing to non-critical platform subsystems and routed through the power switchboard
• 4 sets of payload power buses distributing to primary payload subsystems and routed through the power switchboard
Four data buses shall be provided through the interface:
• 100 kit/s platform I2C data bus, interfacing the platform subsystems to the MIC (Mission Interface Computer) and FUNCube transceiver. In nominal operations, the MIC-FPGA is the master of all buses.
• 100 kbit/s payload I2C data bus, interfacing the primary payloads to the MIC
• Up to 1 Mbit/s communications SPI data bus, interfacing the S-band transmitter to payloads and AMAC (Active Magnetic Attitude Control) routed by or through the MIC.
• 9600 bit/s nominal communications UART data bus, interfacing the MIC to the UV transceiver.

RF Communications
• Primary transceiver capability for telecommand, telemetry, and redundant payload data, uses an Astro Dev off-the-shelf UVTRX (UV Transceiver), providing a UHF uplink and VHF downlink both using 9600 bit/s GMSK using CCSDS packets. When not transmitting, the transceiver shall operate in a Morse code beacon mode for broadcasting identification and basic health data for tracking. The UV TRX interfaces to two UV monopole whip antenna deployed from the ADM (Antenna Deployment Module).
• High data rate transfers of payload data shall use a CPUT (Cape Peninsula University of Technology) developed software defined STX (S-band Transmitter) for downlink at variable rates up to 1 Mbit/s O/QPSK (with 1/2, 1/4, 1/8 rates) for enhanced telemetry and payload data utilizing the IntelSat encoding standard, and CCSDS packets. The transmitter shall interface to a 7 dBi directional S-band patch antenna located on the –X (nadir pointing) surface mount SA (Solar Array). The STX has various modes of operation:
- In configuration mode the carrier frequency, power level, data rate and modulation scheme can be selected.
- In synchronization mode synchronization bytes are sent in order for the ground station receiver to achieve lock. The STX will accept data from the SPI bus and until the FIFO is full.
- In data mode data from the FIFO is transmitted to the ground station. Data is written to the FIFO at a suitable rate to prevent buffer underruns.
- The STX will automatically switch off after 15 minutes if not commanded to switch off via I2C.
• Secondary and safe mode transceiver capability for basic telecommand and telemetry uses the AMSAT-UK developed FUNTRX (FUNCube Transceiver) capable of VHF 1200 bit/s BPSK with FEC packet downlink and a UHF 100 ms proprietary DTMF-based uplink. The transceiver consists of three internal modules (CCT, RF, PA). The transceiver downlinks a standard telemetry packet with data from a Material Science Experiment which can be received at a USB dongle antenna for education & outreach into schools. A transponder mode of operation for radio amateurs is also available. The transceiver interfaces to two additional UV monopole whip antennas deployed from the ADM.
Launch
UKube-1 was launched as a secondary payload on July 8, 2014 (15:58:28 UTC) on a Soyuz-2-1b launch vehicle with Fregat-M upper stage from the Baikonur Cosmodrome, Kazakhstan. 14) 15) 16) 17)
The primary payload on this flight the Meteor-M2 mission of Roskosmos/Roshydromet/Planeta, Moscow, Russia.
The planned mid-December 2013 launch has been delayed again following the latest series of issues with the primary satellite payload. Russia's Meteor-M2 polar-orbiting meteorological satellite has faced delays in the past that have kept the secondary payloads — Norway's AISSat-2, Canada's M3MSat, Britain's TechDemoSat-1 and UKube-1 among them — on the ground. 18)
Orbit of the primary payload: Sun-synchronous near-circular orbit, altitude of ~ 825 km, inclination = 98.8º.
Orbit of the secondary payloads: Sun-synchronous near-circular orbit, altitude of ~ 635 km, inclination = 98.8º. The MKS-PN2 (Relek) was released first of the secondary payloads into an elliptical orbit of 632 km x 824 km.
Secondary Payloads
• MKA-PN2 (Relek), a microsatellite of Roskosmos, S/C developer NPO Lavochkin on the Karat platform (59 kg, study of energetic particles in the near-Earth space environment (ionosphere) including the Van Allen Belts.
• DX-1 (Dauria Experimental-1), the first privately-built and funded Russian microsatellite (22 kg) of Dauria Aerospace, equipped with an AIS (Automatic Identification System) receiver to monitor the ship traffic. 21)
• TechDemoSat-1 of UKSA/SSTL, UK with a mass of 157 kg
• SkySat-2 of Skybox Imaging Inc. of Mountain View, CA, USA, a commercial remote sensing microsatellite of ~100 kg.
• M3MSat dummy payload of 80 kg.
• AISSat-2, a nanosatellite with a mass of ~7 kg of FFI (Norwegian Defense Research Establishment) Norway, built by UTIAS/SFL, Toronto, Canada.
• UKube-1, a technology demonstration nanosatellite (~3.5 kg) of UKSA/Clyde Space Ltd., UK.
Orbit: Sun-synchronous circular orbit of Meteor-M2, altitude of ~ 825 km, inclination = 98.8º, period = 101.41 minutes, LTAN (Local Time on Ascending Node) at ?? hours.
Orbit of the secondary payloads: Sun-synchronous near-circular orbit, altitude of ~ 635 km, inclination = 98.8º. The MKS-PN2 (Relek) was released first of the secondary payloads into an elliptical orbit of 632 km x 824 km.
Mission Status
• December 2015: UKube-1 is still working and the plan is that AMSAT UK will operate the FUNCube-2 payload for 2 years for outreach and education. 22) 23)
• October 27, 2015: UKube-1, the first national spacecraft, has now completed its nominal mission following over 14 months of operations. Launched in July 2014, UKube-1 is a technology demonstration mission with a broad set of objectives aimed at attracting and training future generations of engineers, encouraging collaboration across sectors and institutions, fast tracking space technology development and engaging with students. 24)
As a 3 unit CubeSat (30 x 30 x 10 cm), flying 4 main payloads, with all the key subsystems of much larger satellites, UKube-1 remains one of the most advanced CubeSats ever built. Despite some technical challenges in orbit, the mission has achieved a range of milestones including:
- delivery into the correct planned orbit (around 650km, sun-synchronous)
- successful deployment of solar panels and antenna
- good battery health
- slow spin rate measured
- uplink and downlink capabilities checked, including Large Data Transfer, downlink at 3 speeds, and redundant communications mode
- all core payloads commissioned and data collected for each
- on-board camera technology successfully tested
- data downlinked from multiple ground stations across the globe.
UKube-1 has also helped maintain the UK's leading position in the CubeSat sector. Participation in the mission placed Clyde Space in an excellent position to capitalize on the fast growing global nanosatellite market. The company has experienced 100% year on year growth, both in turnover and employees, as a direct result from involvement in UKube-1, and is firmly established as a global leader.
According to Craig Clark, CEO of Clyde Space Ltd.: "UKube-1 represents a pivotal achievement in the development and growth of Clyde Space. The project moved the company from being a spacecraft subsystems supplier to providing full missions for our customers. To give some context to the extent that UKube-1 has had to our business, Clyde Space has more than quadrupled in size in the last 3 years and there are currently over 60 CubeSats planned through production here in Glasgow over the next 18 months. The return on investment for UKube-1 in terms of jobs and export sales for the UK has been outstanding and is a great example of industry and the UK Space Agency working together to put the UK at the forefront of global space technology."
STFC's RAL Space provided the Ground Station for the mission at Chilbolton Observatory in Hampshire UK, and UKube-1 operations were commanded from there.
- Although the Agency-supported mission phase has ended, discussion is underway with AMSAT-UK about the possibility of taking over UKube-1 operations to continue its educational and outreach activities until the satellite orbit naturally degrades (Ref. 24).
• August 26, 2014: The UKube spacecraft continues to be healthy, with batteries and solar panels in great shape. Its attitude has stabilized so it is spinning slowly. 25)
- The team has tested the FUNcube-2 educational payload and has been able to run it at high power, which makes it easier for schools to capture data with a small aerial.
- The team has commanded UKube-1 and has received housekeeping data from it. However, operational anomalies are experienced with the primary communications link; this isn't working as well as intended and is preventing normal operations for payload commissioning at present. The team has an agreed way forward to use the backup and this is being implemented now, using a different configuration with the FunCube-2 transceiver as the downlink. This is with a view to stabilizing the platform within the next few weeks, and will allow payload commissioning to begin as soon as possible.
• The first 145.840 MHz beacon signal was received on by the UKube-1 team in Chilbolton on July 8, 2014 at 19:16 UTC. 26)
Sensor Complement
The UKube-1 platform is able to accommodate at least three payloads compliant to the "payload interface requirements" and within the payload resource allocation for mass, volume, power and data:
- < 1080 g mass inclusive the CSK PC/104 connectors
- < 108 mm height envelope
- < 1200 mW sunlit average power (no eclipse operation)
- < 36 kB per orbit still provides valuable mission return.
UKSA started a payload competition among UK universities and industry. There were a total of 22 proposals for payload concepts on UKube-1. Of these, seven potential payloads have been progressed for UKube-1, which have now been down-selected to four at the Payload Selection Review, with the intention is to maximize the number of payloads flown on the first mission. In addition the MIC was incorporated as a payload with an off-the-shelf OBC selected as baseline at CDR(Critical Design Review). 27) 28)
• TOPCAT: Ionospheric study based on GPS measurements
• JANUS: Random number generation using radiation effects
• MPQ: Open source student satellite testbench
• C3D: Imager and CMOS radiation effects
• MIC: High performance computing technology demonstration.
TOPCAT (Topside Ionosphere Computer Assisted Tomography)
TOPCAT, a project of the University of Bath, will be the first GPS device aimed at measuring space weather conditions in the plasmasphere (the areas of space just beyond the Earth's atmosphere). The results from the measurements taken by TOPCAT will allow these conditions to be monitored and reacted to, reducing negative implications for GPS and improving systems such as satellite navigation and telecommunications. TOPCAT is funded by the University of Bath and the Bath Alumni Fund. 29) 30)
TOPCAT is a specialized dual-frequency GPS receiver that is suitable for operation in the space environment. The goal of TOPCAT is to study space weather through tomography, by observing the upper ionosphere and the plasmasphere. This could validate the technique for a future constellation mission to provide real space weather maps.
The main core of TOPCAT is the "space rated" NovAtel dual-frequency GPS receiver, which is one of the smallest dual-frequency receivers on the commercial market. Communication between the GPS and the CubeSat platform is handled using ATMega2560, selected for its large amount of RAM. A 1 Mbit EEPROM is used for long term storage in place of flash, because it is more robust in a high radiation environment. There are two GPS receivers involved in this project. The first is space rated and is onboard the CubeSat, the second is on the ground. All GPS units are required to have COCOM limitations where they will stop working at velocities greater than 500 m/s if the altitude is higher than 18km. The limitations are implemented to discourage the use of GPS in intercontinental ballistic missiles. There is one other situation where this condition is satisfied, and that is on a satellite. In order to obtain a space rated GPS that can maintain lock in Earth orbit, it was necessary to file a lot of paperwork. Upon receiving the GPS it was necessary to test it using CAST 1000 GPS simulator which created the fake signals necessary to confirm its ability to function at high velocities in Earth's orbit.
Janus (Random Number Generator using Single Event Upsets)
Janus is a device of EADS Astrium Ltd. with the objective to demonstrate on orbit the feasibility of a patent held by EADS Astrium (Patent: 20090316898, inventors: Omar Eman, Peter Bennie and James Stuart Glanfield) on using the radiation environment to demonstrate true random number generation for high data rate applications e.g. SAR. True random number generation is an essential component of secure communication systems required by many satellites.
A secondary objective of the device is to fly a technology demonstrator to determine the SEU (Single Event Upset) effects on a Xilinx FPGA (Field Programmable Gate Array) device (gathering statistics on the radiation performance). These devices are SRAM based, therefore potentially allowing in orbit reconfiguration. The ability to use these FPGA's will enable further leaps in, in-orbit functionality and data rates. 31)
C3D (Compact CMOS Camera Demonstrator)
The C3D instrument is being developed as a collaboration between the CEI (Centre for Electronic Imaging) at the Open University (Milton Keynes, UK) and e2v technologies plc. (Chelmsford, UK), a world-leading supplier of scientific imagers into the space market. The objectives are:
1) Provide a technology demonstrator to improve the TRL (Technology Readiness Level) of new CMOS (Complimentary Metal Oxide Semiconductor) sensors
2) Correlate the effects of space radiation with ground based testing - primarily SEE (Single Event Effects) and dark current increase
3) Capture images of the Earth (wide + narrow fields).
This imager is based on a new sensor technology which is being developed and evaluated for space use, based on 0.18 µm CMOS technology. The instrument, which is largely being developed by e2v-sponsored PhD students, will be designed to perform a variety of imaging tasks, including taking pictures of the Earth, and to be an experimental test-bed for radiation damage effects in space. 32) 33) 34) 35)
The C3D instrument uses 3 CMOS detectors with a power consumption of < 1W and a mass of 200 g. The imager is based upon e2v's new 1.3 Mpixel "camera on a chip" CMOS image sensor. Technology development and readiness is already advanced: radiation hardness and space applications have been investigated through an existing PhD studentship. The device technology has been demonstrated to withstand 1010 protons cm-2, a TID of 200 krad and has been recently tested using heavy ions for SEU/SEL effects and has been demonstrated to work without any catastrophic burnout effects.
The C3D includes 3 CMOS image sensors, each performing different functions; wide and narrow field imaging, plus radiation damage assessment. Being a radiation damage experiment, which also takes images, the instrument also contains thermometry and dosimetry monitoring functions to enable the results obtained to be correlated with those obtained in laboratory testing on the ground.
e2v is a world-leading provider of CCD-based scientific imaging sensors into the global space community, specializing in high performance sensors, customized to the application needs, often with back-illumination to improve sensitivity. In the future, this tailored service to provide customized sensors will extend to the provision of application-specific CMOS imaging technology; indeed some missions are already exploring custom designs (e.g. EarthCARE).
In the C3D instrument, a new view "Eye-on-Si" CMOS imagers is taken, providing the first flight demonstration of the technology in space. This instrument is undoubtedly not be the first flight of a CMOS imager on a CubeSat; however, the other imagers have been very simple COTS components. The unique aspect of this instrument is that the project aims to fly one CMOS imager of a family, whose design heritage will provide traceability from our existing space radiation damage qualification campaign, through to future space imagers coming from the e2v CMOS design stable.
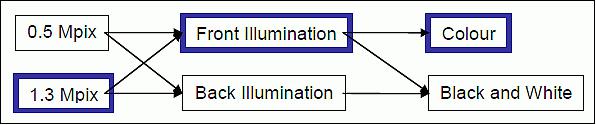
Several variants exist of the proposed CMOS imager represented schematically in Figure 11. Whilst the technological demonstration could be performed on any variant, as this is a precursor to flight of this technology on science missions, the team preferred to fly a back-illumination option for enhanced sensitivity. However, the tight timescales for the original UKube-1 schedule precluded this. The key remaining variants to select between are therefore based on pixel number and color vs. black and white. For the instrument design the team selected the larger 1.3 Mpixel imager with its color variant, which will provide a greater return for this small technology demonstrator.
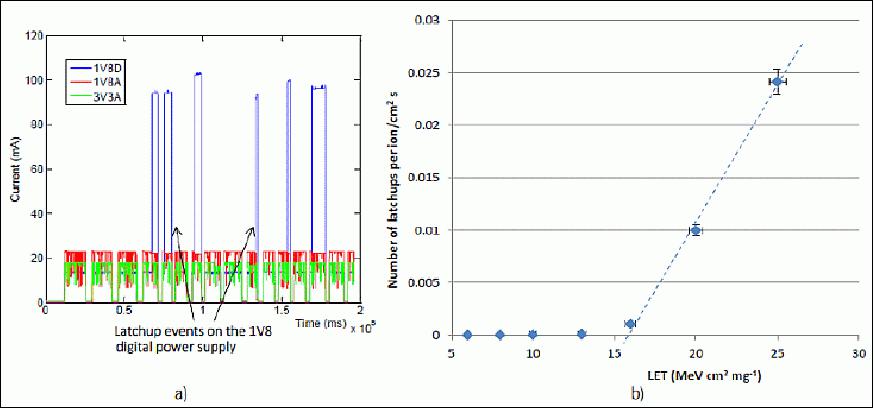
The CMOS sensors clearly do not suffer the charge transfer losses experienced by CCDs, however they are susceptible to SEU and latchup effects which are not a concern for CCDs. Figure 12 shows the results of latchup testing conducted at HIF in Louvain as part of this instrument development on the EV76C560 "Sapphire" sensors. The sensor was operated for blocks of time and periodically re-set by the system. A latchup event produces an increase in current consumption, and the device becomes un-responsive, and holds this state until the next reset. Non-catastrophic latchup events were monitored which caused the device to stop functioning temporarily, however normal operation resumed following the next power-cycle of the sensor. Figure 12a shows several such latchup events particularly to the circuitry on the 1.8 V bias line, and Figure12b shows that the onset of significant device latchup occurs at LET values typically 16 MeV cm-2/mg and higher. Significantly, of all of the devices tested (both Jade and Sapphires types), no catastrophic burnout occurred.
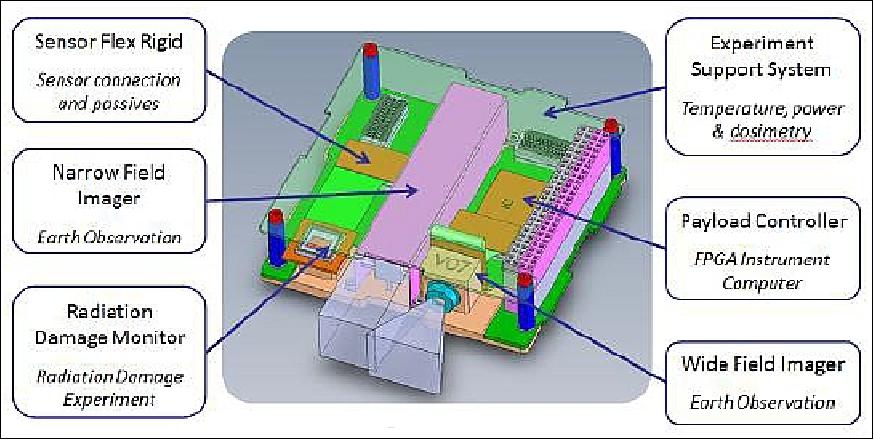
System Overview
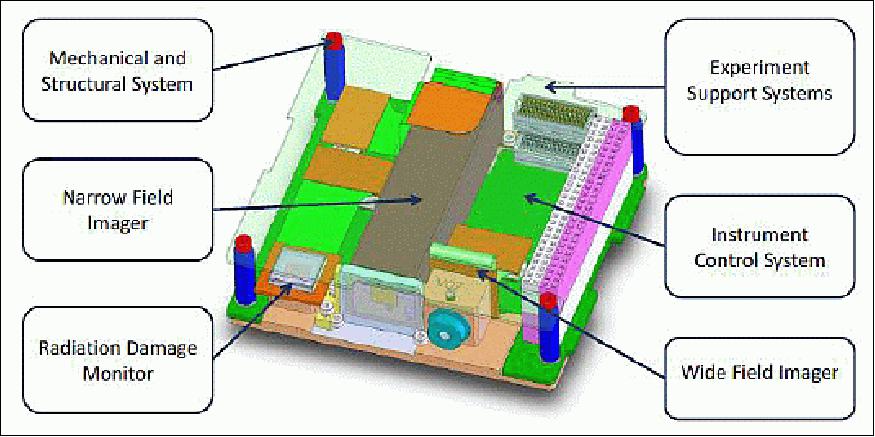
The C3D instrument uses the standard CubeSat PC104 experiment slot with a 9 x 9 x 2 cm3 volume. The payload has several novel attributes. For the imaging, it possesses two CMOS image sensors. The first is behind a lens providing a WFI (Wide Field Imager) of the Earth with a FOV of ~40º. The NFI (Near Field Imager) has its own CMOS sensor and has a FOV of ~2º. The locations of the co-aligned NFI + WFI were constrained by the slots available in the standard Pumpkin 3U CubeSat support structure. The radiation damage in the sensor technology is monitored using a third sensor, creating the RDM (Radiation Damage Monitor). This third sensor is optically shielded from light so that the dark current can be measured. The RDM sensor is bonded to a TEC (Thermo Electric Cooler) to enable the temperature to be stabilized for accurate repeatability of measurements. In addition, the RDM can be operated at elevated temperatures up to +80ºC to enhance the radiation-induced dark current artefacts. The experiment is complemented by inclusion of two RADFET dosimeters, each with their own PT100 temperature sensors. One RADFET is located on the ESS (Experiment Support System) PCB to provide an estimate of the TID received by the experiment. The other RADFET and PT100 is provided to the spacecraft to monitor other critical areas. In this instance the second monitoring position is by the spacecraft batteries. The two RADFETs will assist both instrument and mission teams to assess the accumulation of TID as the mission progresses.
Several models of the payload were assembled, and Figure 14 shows a photograph of one of the engineering models of the instrument with a ruler for scale. In this image the payload controller (top PCB) has an additional lower PCB which provides a simple USB interface to a laptop for ease of testing. The spacecraft manufacturers, ClydeSpace also provided a spacecraft emulator board which interfaced through the PC104 edge connector stack to enable full testing of the system prior to shipment.
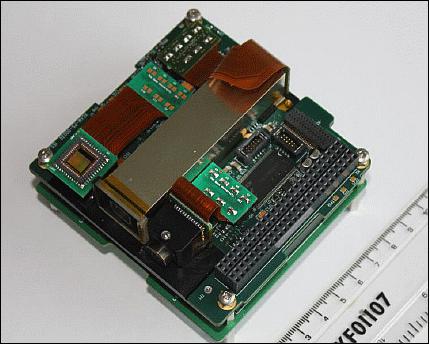
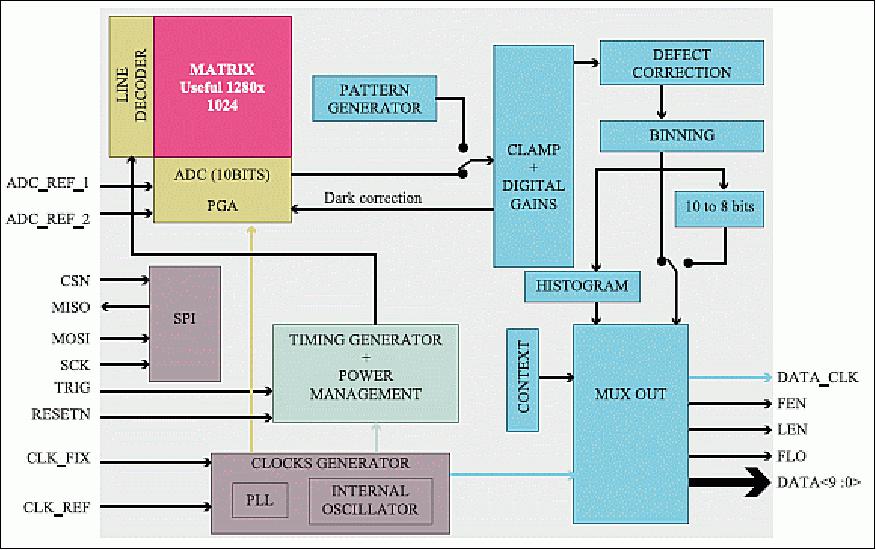
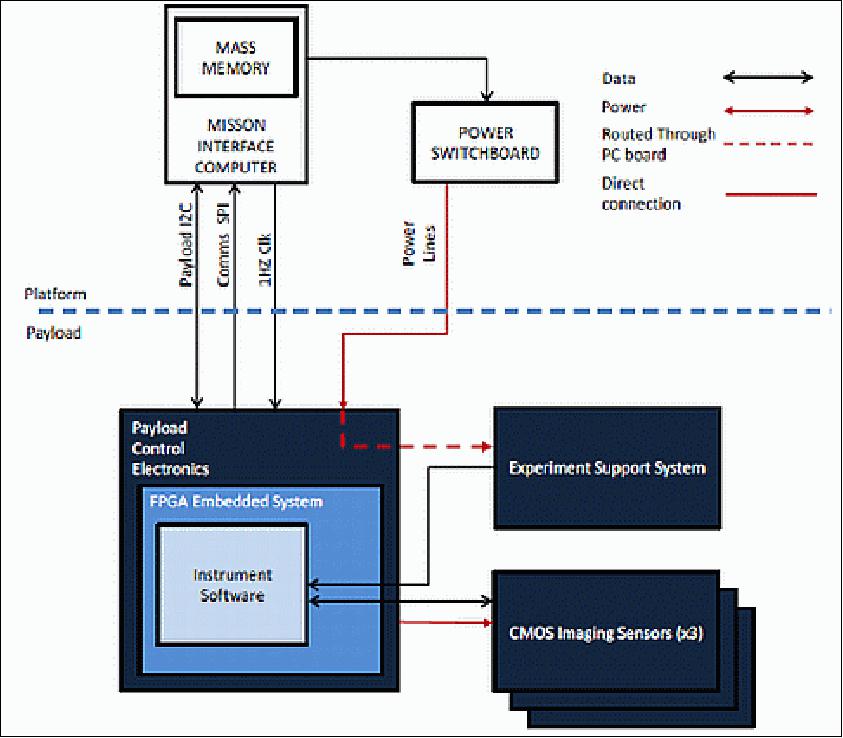
Figure 15 gives an overview of the system functional blocks of the experiment and how it interfaces to the spacecraft. The two PCBs of the instrument can be seen; the PCE (Payload Control Electronics), and the ESS (Experiment Support System), in addition to the 3 CMOS image sensors which are controlled by the FPGA on the PCE.
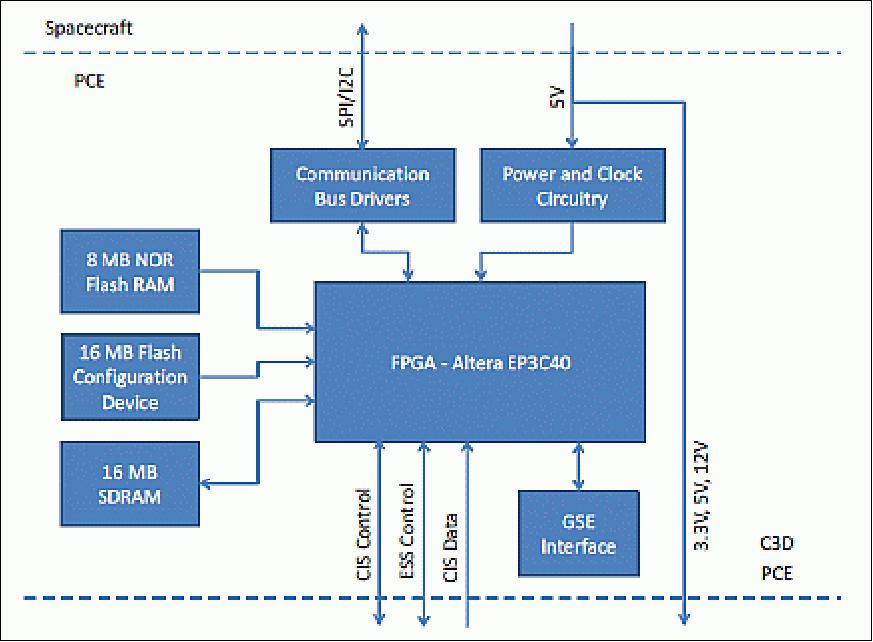
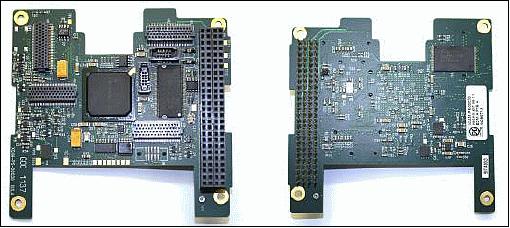
The PCE was designed and manufactured by XCAM Ltd. Figure 16 gives a schematic of the main functional blocks within the PCE, whilst Figure 17 provides photographs of the top and bottom of the PCB. The PCE was constructed as a 10 layer PCB, and although the build standard could use COTS components, the assembly used Pb-solder to help suppress tin-whiskers which might develop over the 3 year lifetime on-orbit. The irregular shape to the PCB arose due to the constraints introduced by the mechanical structure of the instrument and the optical components. In particular, the experiment was built on an aluminum frame which was both used to support the optics and to provide a thermal heatsink for the power dissipated in the TEC of the RDM.
Parameter/device | Performance | Comments |
Optical system | NFI: Two mirror reflecting Cassegrain telescope with AR coating on entrance window. WFI: Doublet lens with attached UV and IR filter | Broadband AR coating with peak at 550 nm, 450 nm and 700 nm UV and IR cutoff on WFI |
SNR | 1000:1 (at full well) | Data reduced to 8 bits in flight configuration |
Contrast | MFT of 50% at Nyquist for 600 nm (dominated by sensor MTF given that the optical system is not Rayleigh limited) |
|
Frame rate | Effective frame rate of 2 frames/minute | Limited by data bus. C3D can capture 5 FPS and locally store up to 6 images ready for later download |
Compression | Lossless JPEG-LS | 50% compression ratio |
Exposure control | Manual or automatic |
|
Thumbnailing | 100 x 200 pixel thumbnail produced |
|
Windowing | Image windows can be produced onboard the instrument |
|
Bus interfaces | SPI, I2C, UART | Utilizes the UKube-1 communication protocol |
Required supplies | 3.3 V, 5 V, 12 V |
|
Nominal power consumption | 900 mW |
|
Application memory | 16 MB SDRAM |
|
Instrument size | ~ 94 mm x 92 mm x 26.5 mm |
|
Instrument mass | 175 gram |
|
Dosimetry | 2 RADFET dosimeters allowing measurement of up to 32 krad (Si) with a resolution of ~10 rad | One RADFET located on solar panels of spacecraft to provide reference data |
Temperature control | Control of RDM to within 1ºC between -20ºC and +70ºC. |
|
MPQ442 (MyPocketQub 442)
This payload of UKSEDS (United Kingdom Students for the Exploration and Development of Space) is an open source myPocketQub IQEA (In-plane Qub with Experiment Array) with five experiments: 36) 37)
• OpenSpace365 - Arduino with sensors allowing 365+ school pupils, university students and hobbyists to run their own experiment in space for a day
Note: "Arduino" is an open-source single-board microcontroller designed to make the process of using electronics in multidisciplinary projects more accessible.
• OrbitView (popout camera) – browse interactive panoramas of UKube and the view from UKube. OrbitView is an imaging payload to capture 360º panoramas from multiple points on-orbit to allow anyone to ‘look out of the window' of UKube-1.
• Qubduino – low cost FPGA testing self repairing advanced virtual payloads. The objective is to space qualify GBP 10 FPGA, test self repairing algorithms and host advanced virtual payloads.
• SuperLab – a physics experiment to characterize superconducting materials.
• SuperSprite – satellite on a chip proof-of-concept with solar cells, energy storage, microcontroller and transceiver, and with a UHF downlink.
UKSEDS is a British student organization with members from more than a dozen universities. The MPQ442 experiment allows students and hobbyists to take part in a space mission.
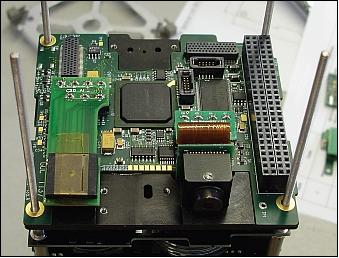
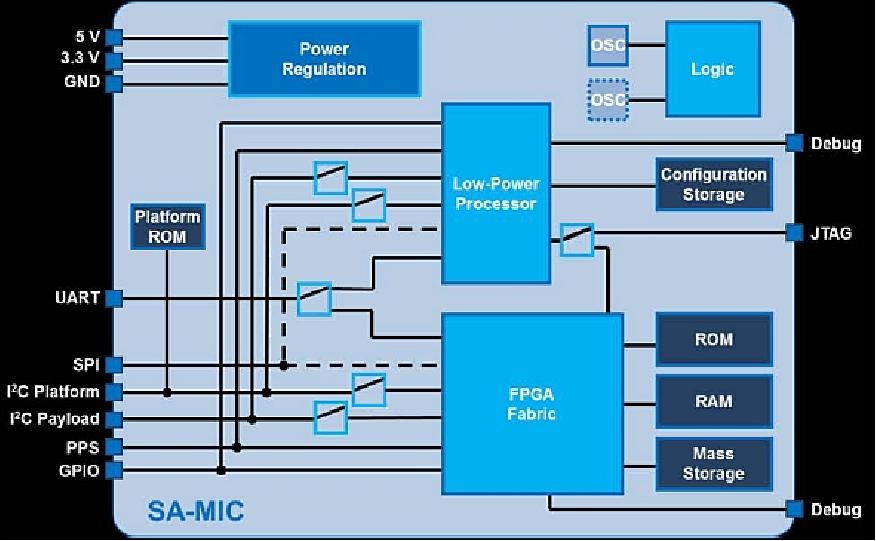
MIC (Mission Interface Computer)
Platform and payload operations, command, and data handling uses a Steepest Ascent developed Mission Interface Computer (SA-MIC), primarily utilizing a flash-based Actel FPGA (MIC-FPGA) with softcore processor (ARM Cortex M1), and an MSP430 Safe Processor (MIC-SP) to monitor the primary and take control in off-nominal or power critical operations. The SA-MIC also contains a shared memory (8kB) for mission critical telemetries and flags, and 2 x 1 GB mass memories. 38) 39)
FUNcube
The FUNcube payload is a transceiver, provided by AMSAT-UK in collaboration with ISIS (Innovative Solutions in Space BV). It provides UKube-1 with the capability for educational outreach to students at schools and colleges; it is also a "redundant" communications subsystem. The project features a 435 MHz (UHF) to 145 MHz (VHF) linear transponder for SSB/CW (Single Side Band/Continuous Wave) operation. 40)
Note: Since AMSAT-UK has already a FUNCube-1 CubeSat in development, the FUNCube payload on the UKube-1 mission is referred to as FUNCube-2.
Ground Segment
UKube-1 is being generously supported by three UK ground stations. Led by the STFC (Science and Technology Facilities Council) Rutherford Appleton Laboratory's Ground Segment, these crucial elements will provide the link to the orbiting spacecraft, as well as full planning of the operations. The supporting ground stations are provided by Dundee and Strathclyde Universities. The university of Strathclyde ground station was installed by Clyde Space during an earlier phase of the spacecraft development.
The UKube-1 ground segment consists of Chilbolton ground station which will control the satellite, the UMOC (UKube-1 Mission Operations Center) at RAL, and the Dundee Satellite Receiving Station which will collect the data from UKube-1 and forward it to the UMOC at RAL.
The primary ground station has a VHF/UHF antenna plus 6.1 m and 4.5 m antennae that work at S-band and X-band (the latter band not being used on UKube-1). The initial set of secondary ground stations is located at the University of Strathclyde (VHF/UHF) and at the University of Dundee (VHF/UHF and S-band). Others could be added later. During early operations data from the FUNcube, collected by amateur radio experts around the world, were fed into the UKube-1 database via the Mission Planning System, increasing many-fold the housekeeping telemetry available for analysis at the vital stage of understanding the performance of the satellite in orbit. 41)
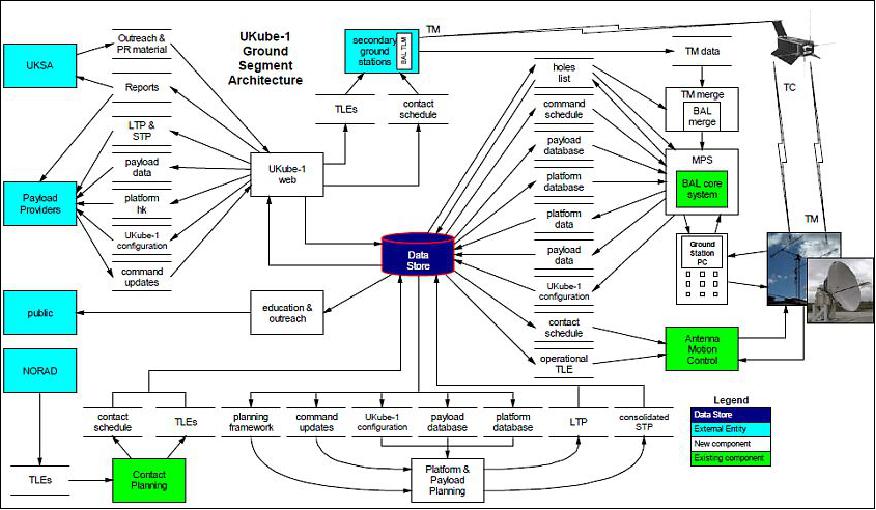
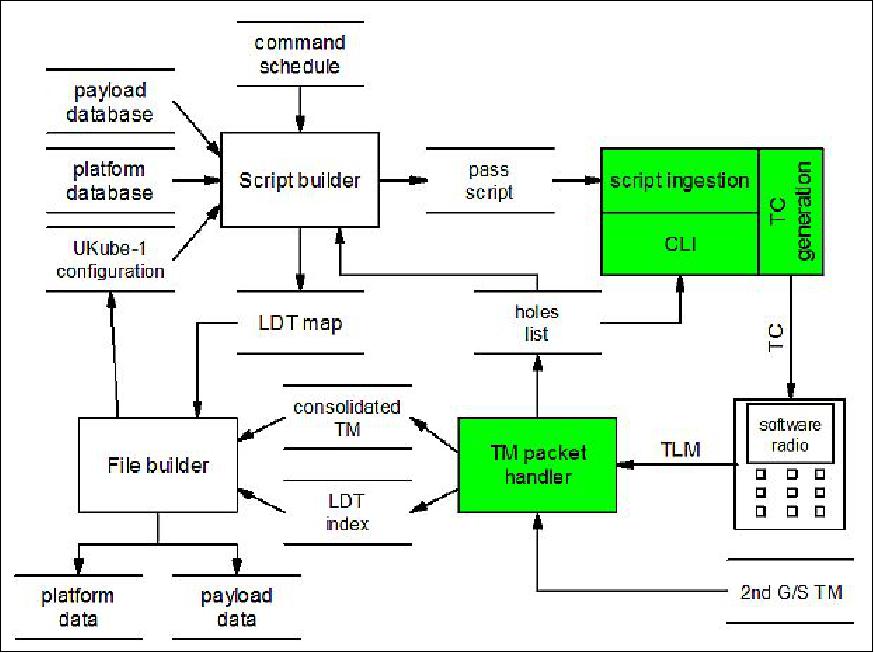
The most complex part of the ground segment is the UMOC. The key components of the UMOC are the MPS (Mission Planning System), the Contact Planning System and the Platform and Payload Planning System. These active elements drive the multiple data stores shown in the diagram. The software runs on a mixture of Debian Linux computers and Windows computers, with mirroring of operational files being performed by the platform-independent own Cloud software.
The Mission Planning System (Figure 22) is built around the UKube-1 AIT/EGSE software from Bright Ascension Ltd. Wrappers were added to this system to make it more suitable for use when controlling a spacecraft from the ground by developing higher level services and interfaces to ingest and output files.
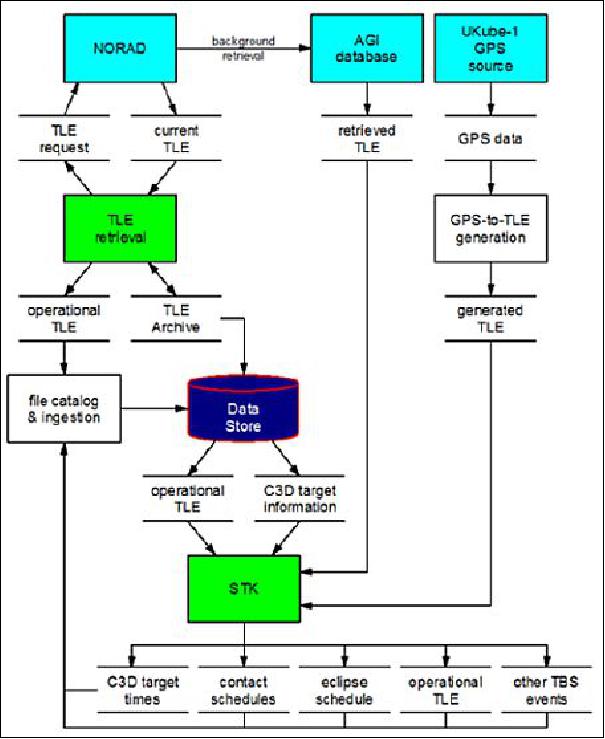
The CPS (Contact Planning System) is driven by two line elements for the spacecraft which can be obtained automatically or on demand from NORAD, or optionally from the AGI web site. These are fed into the STK software from AGI which calculates the times at which contacts with the spacecraft can be made. In order to maximize the versatility of the system, the UMOC and STK are on different computers and STK is run by a remote invocation. Since one of the payloads (TOPCAT) is a GPS receiver, the option of reconstructing the orbit from the data that it obtains is allowed.
References
1) "UK Space Agency to launch Britain's first CubeSat," UKSA, July 21, 2010, URL: https://web.archive.org/web/20121021131656/http://www.bis.gov.uk/ukspaceagency/news-and-events/2010/Jul/uk-space-agency-to-launch-britains-first-cubesat
2) "UK Space Agency kicks off CubeSat pilot program," UKSA, Nov. 10, 2010, URL: http://www.clyde-space.com/news/291_uk-space-agency-kicks-off-cubesat-pilot-programme
3) "Fuelling The Clyde Space Rocket," Space Daily, Feb. 1, 2011, URL: http://www.spacedaily.com/reports/Fuelling_The_Clyde_Space_Rocket_999.html
4) Ritchie Logan, Steve Greenland, "UKube-1: A Multi-Payload Technology Demonstration Platform," 8th Annual CubeSat Developers' Workshop, CalPoly, San Luis Obispo, CA, USA, April 20-22, 2011, URL: https://web.archive.org/web/20190716162039/http://mstl.atl.calpoly.edu/~bklofas/Presentations/DevelopersWorkshop2011/25_Greenland_UKube-1.pdf
5) Chris Castelli, "Cubesats for Innovation, Science and Education, Technology, Science and Exploration," 7th Appleton Space Conference, RAL (Rutherford Appleton Laboratory), Didcot, UK, Dec. 8, 2011, URL: http://www.stfc.ac.uk/ralspace/resources/pdf/presentation_12.pdf
6) "UKube-1;" UKSA, URL: http://www.bis.gov.uk/ukspaceagency/missions/ukube-pilot-programme
7) http://www.clyde-space.com/ukube-1
8) Steve Greenland, "UKube Program, its Payloads & Enabling Technologies," 2012 Summer CubeSat Developers' Workshop, Logan, Utah, USA, Aug. 11-12, 2012, URL: http://www.cubesat.org/images/stories/Summer_Workshop_2012/Day_2/1015_Steve_Greenland.pdf
9) Steve Greenland, "Enabling technologies for downstream services," 2012, URL: http://www.strath.ac.uk/media/faculties/engineering/advancedspaceconceptslab
/scottishspacesymposia/%5B5%5D_-_Steve_Greenland_-_Clyde_Space.pdf
10) "UKube-1 final design approved," AMSAT-UK, URL: http://www.uk.amsat.org/2430
11) Craig Clark, Kevin Worrall, "Plug and Play Attitude Control," Summer CubeSat Developer's Workshop, USU, Logan, UT, August 6-7, 2011, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2011/Summer/08-Clark-PlugandPlayAttitude.pdf
12) Craig Clark, "UKube-1 Platform Design," Summer CubeSat Developer's Workshop, USU, Logan, UT, USA, August 6-7, 2011
13) Craig Clark, Karin Viergever, Andy Vick, Ian Bryson, "Achieving Global Awareness via Advanced Remote Sensing Techniques on 3U CubeSats," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-IV-2
14) Jonathan Amos, "Lift-off for British demo satellites," BBC News, July 8, 2014, URL: http://www.bbc.com/news/science-environment-28200846
15) Anatoly Zak, "Russia launches new weather watcher," July 9, 2014, URL: http://www.russianspaceweb.com/meteor_m2.html
16) "UK's Cubesat books a ride on Russian rocket," Space Daily, Sept. 26, 2012, URL: http://www.spacedaily.com/reports/UKs_Cubesat_books_a_ride_on_Russian_rocket_999.html
17) "Russian Rocket will launch Scotland's First Satellite," Space Daily, Dec. 28, 2012, URL: http://www.spacedaily.com/reports/Russian_Rocket_will_launch_Scotlands_First_Satellite_999.html
18) Peter B. de Selding, "Latest Soyuz/Fregat Delay Underscores Issue for Small-satellite Owners," Space News, Sept. 27, 2013, URL: http://www.spacenews.com/article/launch-report/37416latest-soyuzfregat-delay-underscores-issue-for-small-satellite-owners
19) David Puliese, "Russian sanctions have killed Canadian satellite launch," Ottawa Citizen, April 24, 2014, URL: http://www.ottawacitizen.com/technology/Russian+sanctions+have+killed
+Canadian+satellite+launch/9772896/story.html
20) "Canada to Pay for Ditched Launch Contract with Russia," Space Daily, April 29, 2014, URL: http://www.spacedaily.com/reports/Canada_to_Pay_for_Ditched_Launch_Contract_with_Russia_999.html
21) "Dauria Aerospace and Samsung will launch the first in Russia private artificial satellite of the Earth," Oct. 15, 2013, URL: http://all-rss.com/item-1070741-dauria-aerospace-and-samsung-will-launch-the-first-in-russia-private-artificial-satellite-of-the-earth/#.UwSE3s7ihqM
22) Information provided by Helen Walker, STFC Rutherford Appleton Laboratory, Harwell Oxford, Oxfordshire, United Kingdom.
23) Helen J. Walker, Peter M. Allan, "UKube-1 planning and operations," Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B4.3.3
24) "UKube-1 completes mission," UKSA, Oct. 27, 2015, URL: https://www.gov.uk/government/news/ukube-1-completes-mission
25) "UKube-1 update," UKSA, Aug. 26, 2014, URL: https://www.gov.uk/government/news/ukube-1-update
26) "UKube-1 Signals Received," AMSAT-UK, July 8, 2014, URL: http://amsat-uk.org/tag/ukube-1/
27) Information provided by Steve Greenland of Clyde Space Ltd., Glasgow, UK.
28) http://www.bis.gov.uk/ukspaceagency/missions/ukube-pilot-programme/payloads
29) "TOPCAT – Topside Ionosphere Computer Assisted Tomography," URL: http://www.bath.ac.uk/elec-eng/invert/topcat.html
30) https://web.archive.org/web/20120306134455/http://www.bis.gov.uk/assets/bispartners/ukspaceagency/docs/space%20science/cubesats/topcat%20text%20and%20picture.pdf
31) https://web.archive.org/web/20120306134448/http://www.bis.gov.uk/assets/bispartners/ukspaceagency/docs/space%20science/cubesats/astrium%20payload%20text%20and%20picture.pdf
32) https://web.archive.org/web/20120306134438/http://www.bis.gov.uk/assets/bispartners/ukspaceagency/docs/space%20science/cubesats/cmos%20imager%20text.pdf
33) Ross Burgon, Andrew Holland, Richard Harriss, Simon Sheridan, "Spacecraft Health and Environmental Monitoring from a CubeSat Platform," Proceedings of the UN/Japan Workshop and The 4th Nanosatellite Symposium (NSS), Nagoya, Japan, Oct. 10-13, 2012, paper: NSS-04-0309, URL: http://oro.open.ac.uk/34690/1/NSS-04-0309.pdf
34) R. D. Harriss, A. D. Holland,S. J. Barber,S. Karout, R. Burgon, B. J. Dryer, N. J. Murray, D. J. Hall, P. H. Smith,T. Greig, J. H. Tutt, J. Endicott, P. Jerram, D. Morris, M. Robbins, V. Prevost, K. Holland, (2011). "Compact CMOS camera demonstrator (C3D) for Ukube-1," Proceedings of SPIE, Vol 8146, 'UV/Optical/IR Space Telescopes and Instruments: Innovative Technologies and Concepts V, ' September 8, 2011, San Diego, CA, USA, doi: 10.1117/12.895986
35) Andrew Holland, Ross Burgon, Richard Harriss, Karen Holland, "C3D – An Imaging Radiation Damage Experiment on UKube-1," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
36) https://web.archive.org/web/20120306134454/http://www.bis.gov.uk/assets/bispartners/ukspaceagency/docs/space%20science/cubesats/united%20kingdom%20students%20for%20the%20exploration%20and%20development%20of%20space.pdf
37) http://ukseds.org/projects/ukube/
38) P. Karagiannakis, S. Weiss, J. Bowman, "Solving the Digital Signal Processing Problem for CubeSats," 4th European CubeSat Symposium, ERM (Ecole Royale Militaire), Brussels, Belgium, Jan. 30-Feb. 1, 2012
39) "First Scottish-built satellite UKube-1 to launch in 2013," March 20, 2012, URL: http://www.steepestascent.com/news/first-scottish-built-satellite-ukube-1-to-launch-in-2013.aspx
40) http://www.funcubedongle.com/ .
41) Peter M. Allan, Helen J. Walker, "Planning of Operations for UKube-1, the UK's first CubeSat," Proceedings of the 65th International Astronautical Congress (IAC 2014), Toronto, Canada, Sept. 29-Oct. 3, 2014, paper: IAC-14-B4.3.6
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Payload technology demonstrations References Back to top